|
81595| 1
|
[ESP8266/ESP32] 基于 ESP32 做的三舵机机械蚂蚁 |

这篇文章介绍了如何基于ESP32制作一只三舵机机械蚂蚁。这个项目只需要三个舵机、一个夹爪和一些机械设备,总重量约114克。文章详细解释了如何安装蚂蚁的躯干部分、腿部零件、机械部分、头部和夹子以及尾部电池。文章还提供了电路和软件的详细信息,包括如何将电池的电压降低到5V,以及如何将文件名为Blue_Ant-RemoteXY.ino的程序传输到ESP32开发板。最后,文章介绍了如何通过手机APP远程控制这只机械蚂蚁。  蚂蚁是一种神奇的生物,它们需要很少的资源,却能做很多的事情。  一般来说,许多六条腿的机器人每条腿最多需要三个舵机,那么总共就需要 18 个舵机,这会消耗了大量的能量,也与蚂蚁本身的体型相冲突。 但在这个项目中只用到三个舵机、一个夹爪和一点机械设备,就实现了一只极简主义的蚂蚁机器人,除开电池,重量约 114 克。 组件清单 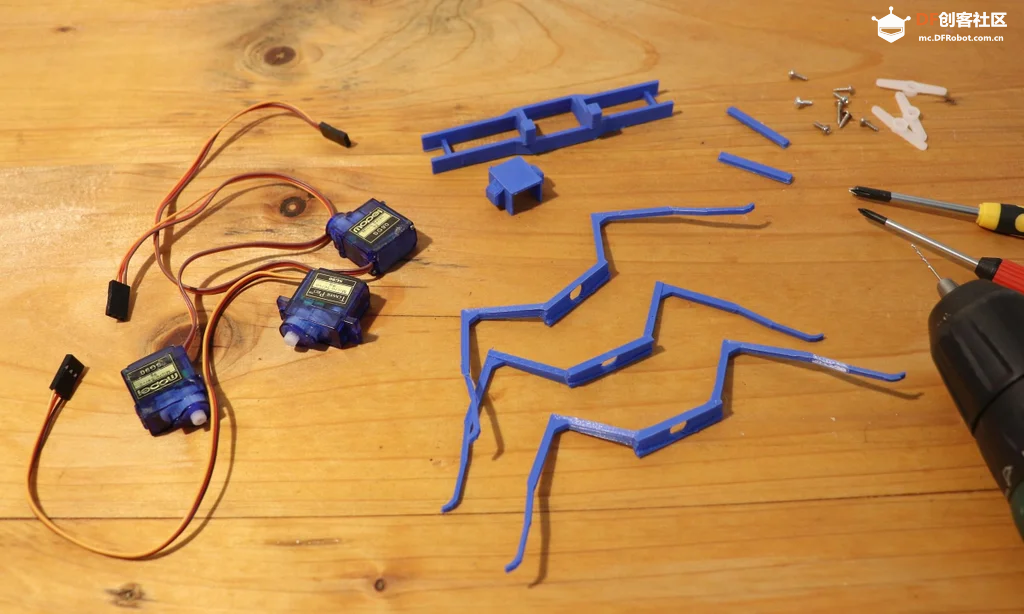
所有的零部件使用 Tinkercad 设计并使用 Ultimaker Cura 制作。 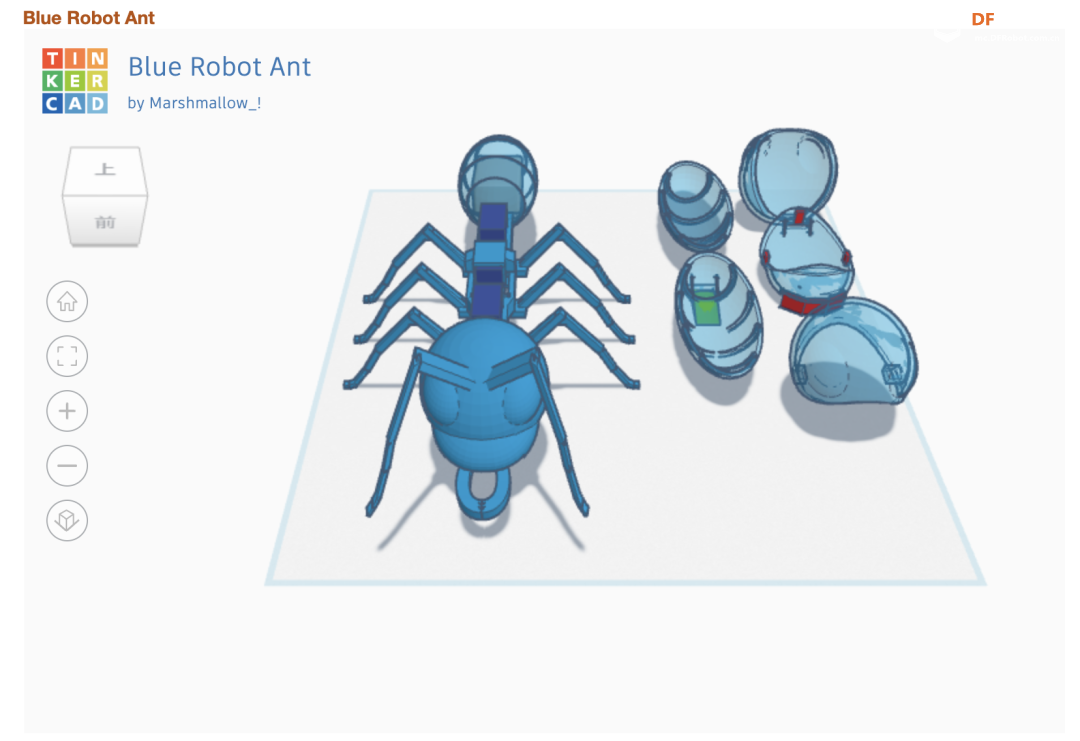 3D 打印文件可以在文末下载。 完整制作视频 安装蚂蚁躯干部分 使用钳子或者锯和锉刀拆下所有舵机上的凸起。 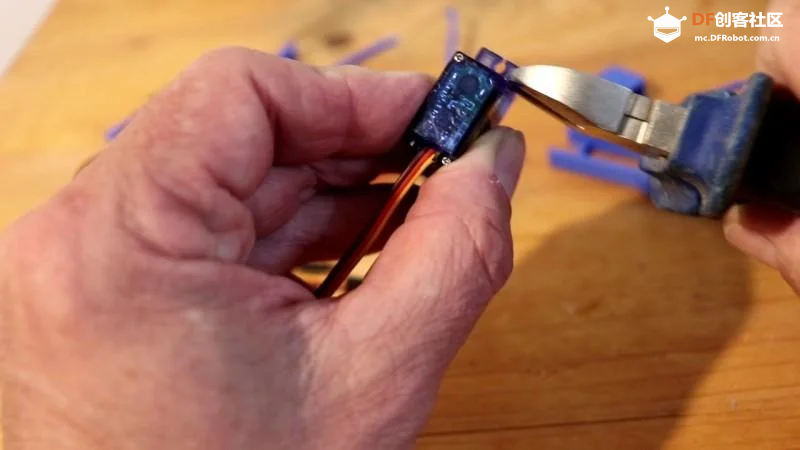  如图所示,将打印底部支架用两个尖头螺钉固定到舵机 2 上,舵机的中间是可以摆动。它还有一个小盖子,稍后用螺丝固定。  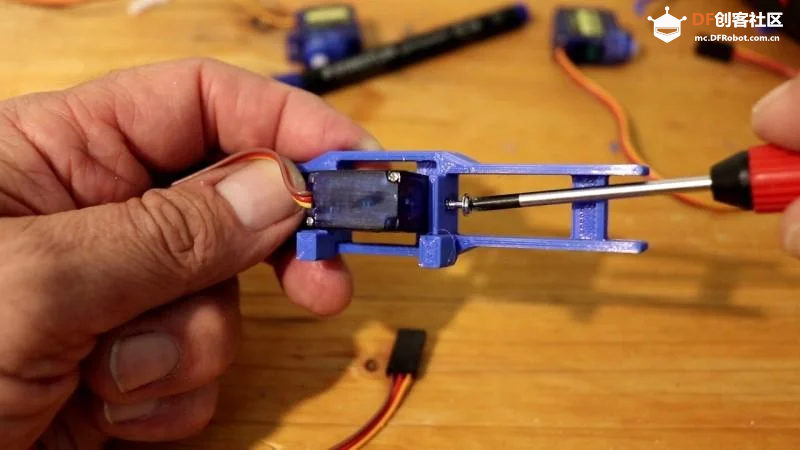 再用热熔胶固定舵机 1 和舵机 3 以及舵机 2 的盖子。 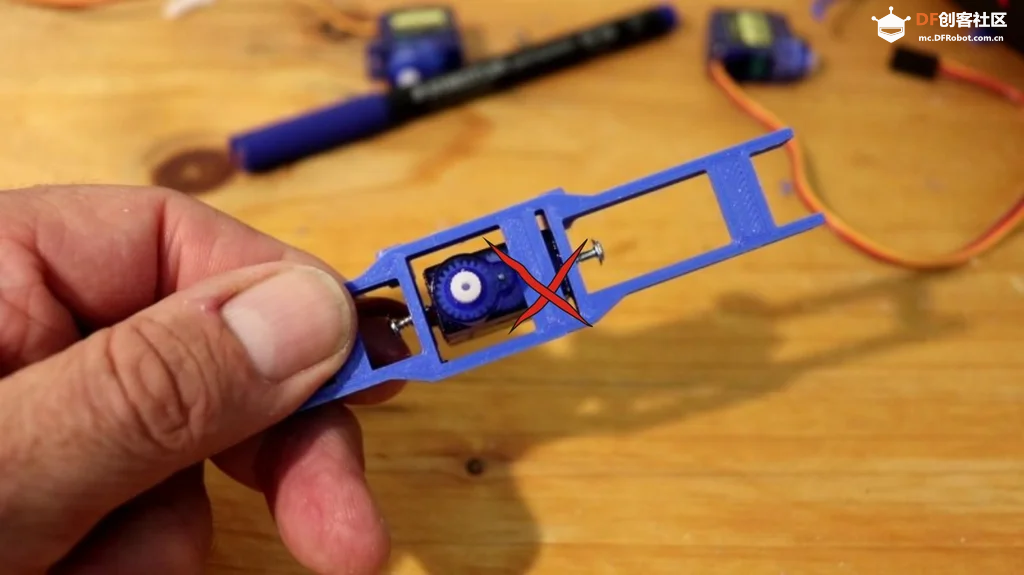 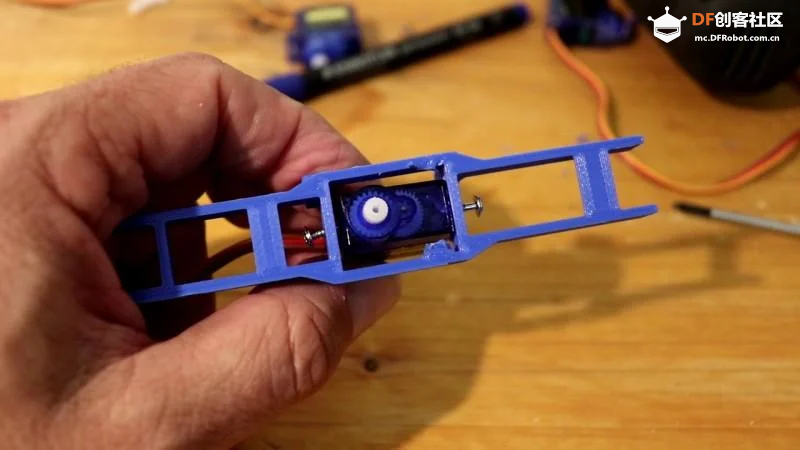 安装腿部零件之前,舵机必须居中。这边可以使用程序centregs.ino(同样可以在文末下载)将舵机设置为90。 安装舵机和腿部 每个舵机带动一对腿,前后移动几度。舵机 1 和舵机 3 会同时移动,所以可以考虑在微控制器上使用相同的引脚去控制。  舵机 2 是以相反的方向移动,并且摆动时会将腿正确的牵引到地面。这种摆动是由连接到舵机 1 的回形针产生的。将每个支腿安装到舵机上,这边你可能还需要钻孔。 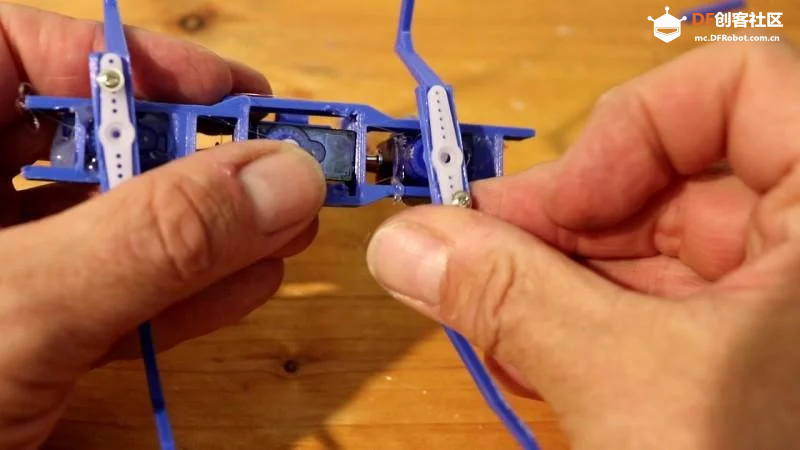 安装机械部分 安装时使用螺钉和回形针,通过腿的安装板将舵机 1 连接到舵机 2 的盖子上。这样就可以跟舵机 1 同步同角度倾斜。 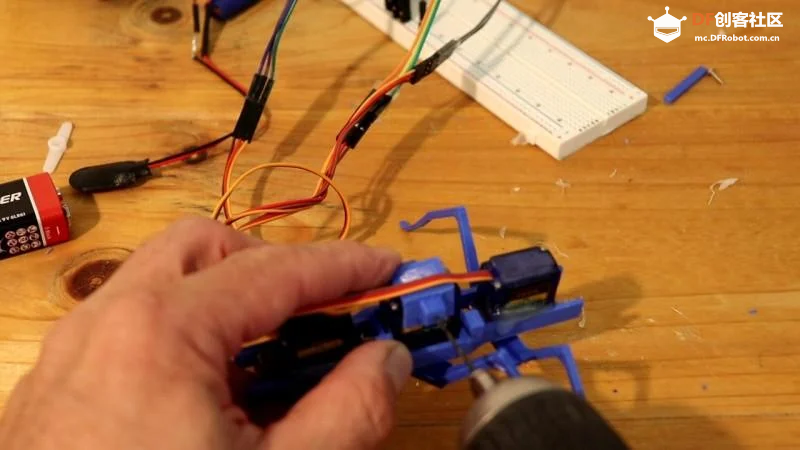 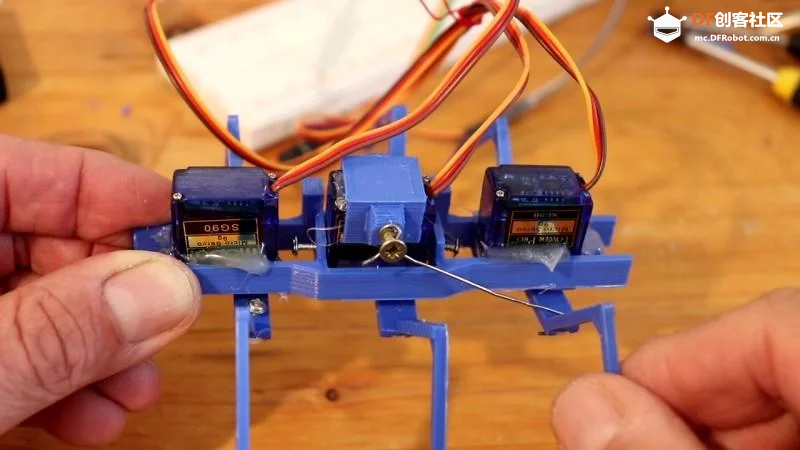 安装头部和夹子 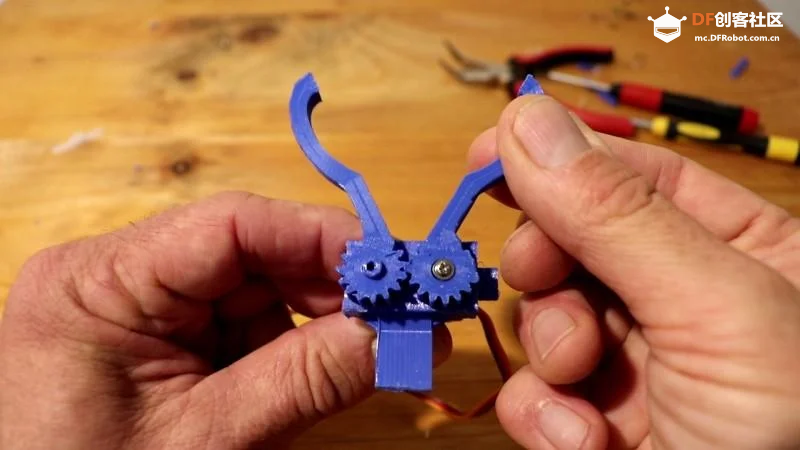 头部的夹子造型其实不是必须的,但它有很好的额外功能。 将不带臂的舵机安装到框内。首先将舵机设置为 90(可参考centreslegs.ino)。将合适的夹子零件放在齿轮上,并用舵机螺钉固定。然后把第二部分放在轴上。  用热胶水将夹子倒置地粘在头部,然后合上头部。把头放在躯干的顶部,并用胶水粘牢。 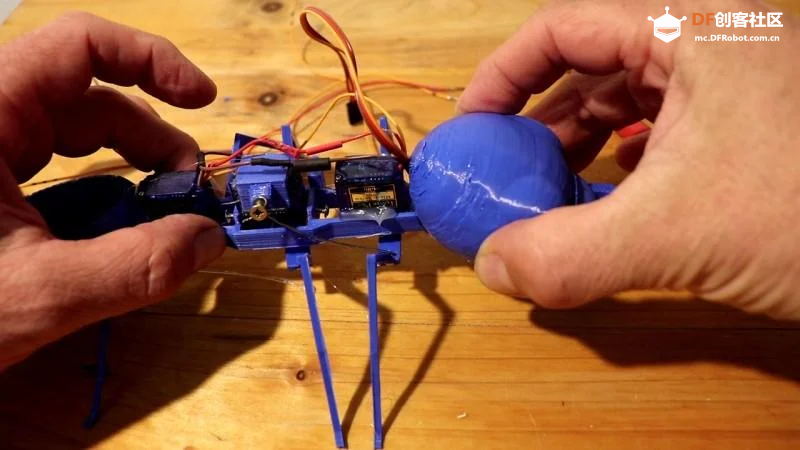 安装尾部电池 将尾部连接到躯干上并粘合。它将容纳电池和微控制器。   电路和软件 9V 的电池能够为舵机提供足够的能量,但电压必须通过降压转换器降低到 5V。  四个舵机的电源通过 5V 并联运行,数据线连接到 ESP32 开发板。它不需要更多的连接。不过,它还可以连接到传感器或 LED。 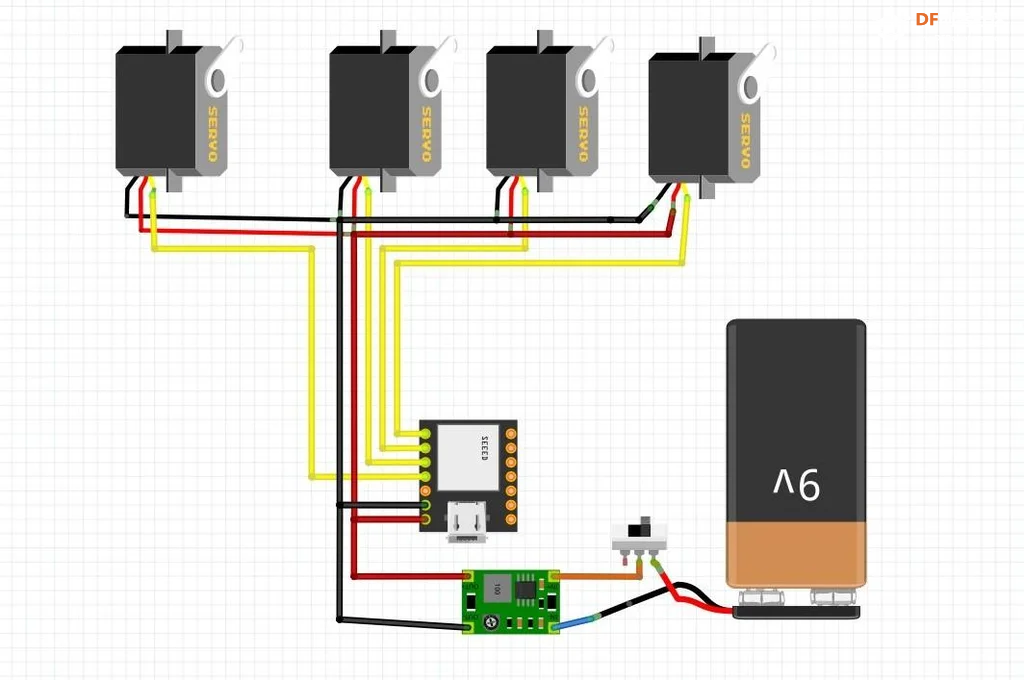 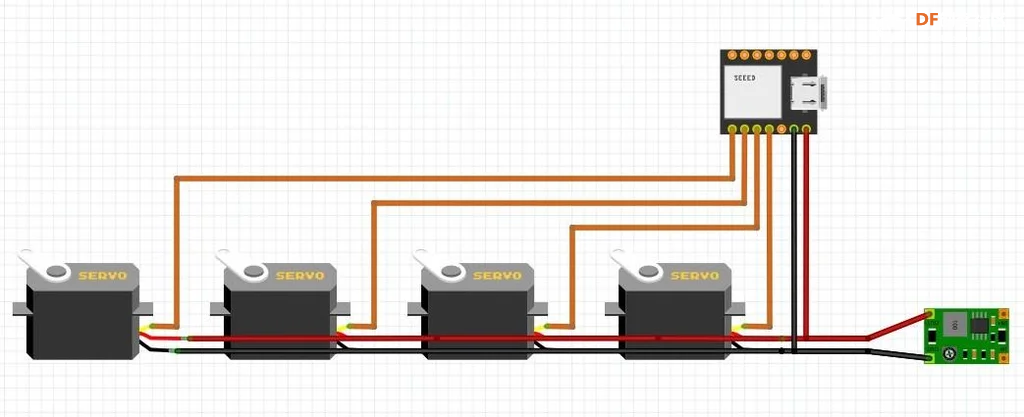 将文件名为Blue_Ant-RemoteXY.ino传输到 ESP32 开发板。同时遥控器已经包含在程序中。可参考https://www.instructables.com/Getting-Started-With-ESP32-C3-XIAO/ 适用于 ESP32-C3 的舵机库:ESP32C3Servo 如果你使用的是其他ESP32或ESP8266,你需要在// ************************* Servos这块位置更改库: 源码文件可以在文末打包下载。 远程控制 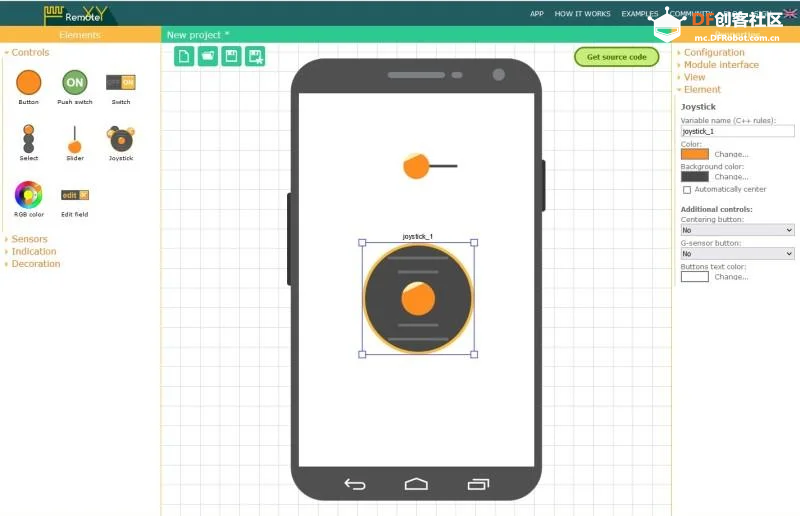 遥控器已包含在代码中。在https://remotexy.com/中,你可以为智能手机遥控器创建自己的界面,并将其插入到程序Blue_Ant-RemoteXY.ino中。  手机APP可参考: https://play.google.com/store/apps/details?id=com.shevauto.remotexy.free https://apps.apple.com/us/app/remotexy/id1168130280 在手机上安装APP,激活蓝牙,打开RemoteXY,搜索并与配对ESP32-C3_Remote。 完成 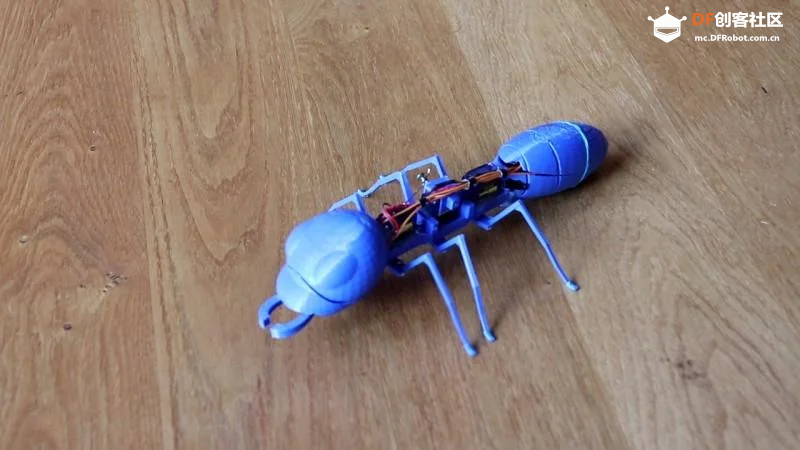 现在你可以启动这只蚂蚁,等待片刻,激活APP,它就可以跑起来了。 原文地址:https://www.instructables.com/Blue-Robot-Ant/ 项目作者:Markus Opitz 转载请注明来源信息 |

497.67 KB, 下载次数: 3233



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






