|
25729| 1
|
[动态] 【比赛优秀作品】电子足球 |
本帖最后由 虚怀若谷 于 2024-4-29 14:01 编辑 【比赛优秀作品】电子足球作品来源:第五届全国青少年人工智能创新挑战赛——开源硬件创意智造专项赛参赛学生:
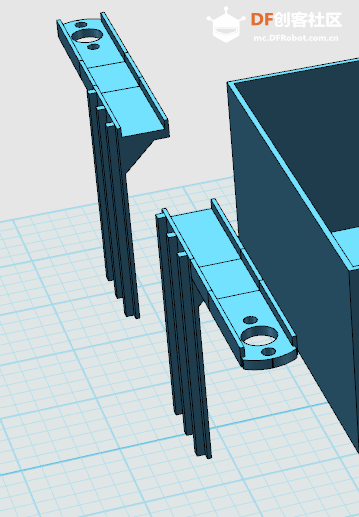
指导教师: 重庆市第八中学校 孙宇新原文链接: https://contest.dfrobot.com.cn/tcwl2022/project/312744?p=dfrobot2022sh1 创作灵感在生活中,我们会看到一种桌上足球,很多人,特别是学龄段儿童,也十分喜欢这种有趣而轻松的桌上运动,而且不受时间和空间的限制。但是,我们也发现了两个问题:1、这项游戏必须要两个人一起进行,但是许多学龄段儿童很难找到一个玩伴;2、就算找到了一个玩伴,水平也不一定相当,会使游戏体验下降。为了解决这两个棘手的问题,我们决定制作这个电子桌上足球。 2 结构搭建(一)零件部分1. 球场我们使用了3Done设计了一个球场。为了增加难度,我们给球场设计了一个向两边倾斜的角度。由于我们的打印机仅支持打印20cm20cm20cm的打印件,而整个球场的体积过于庞大,所以我们将整个球场分成了两半进行打印,之后再用电烙铁把两个部分组装在一起。
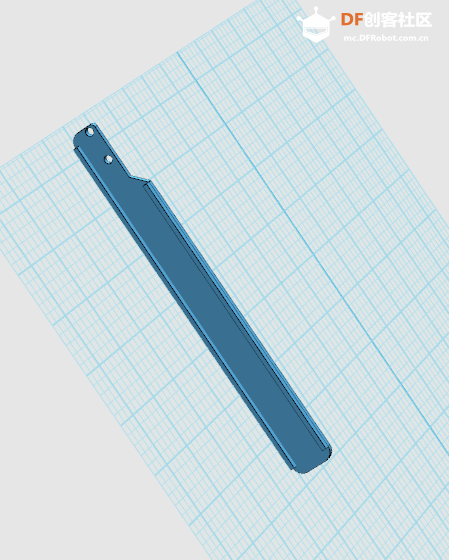
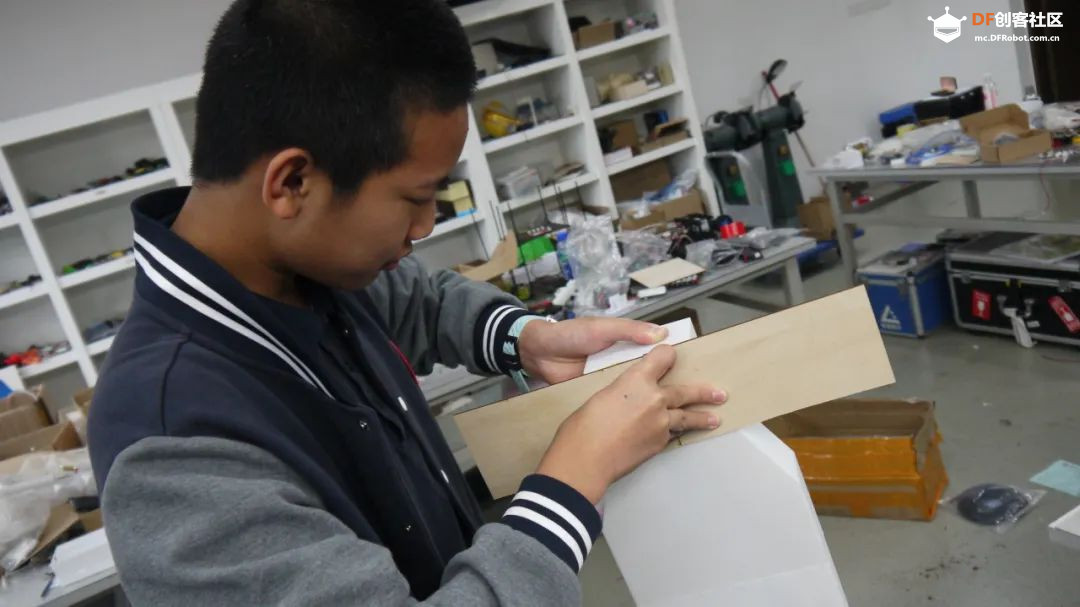
2. 球杆球杆部分我们设计成了“L”型。但是第一次打印出来之后发现球杆太短了,导致球杆击球之后球无法越过我们给球场设计的斜坡。于是我们使用了KT板加长了球杆,测试之后发现加长后的球杆可以将球打过斜坡。我们测量了这时球杆的尺寸。接着我们就将原本的球杆设计件加长后再打印了出来。
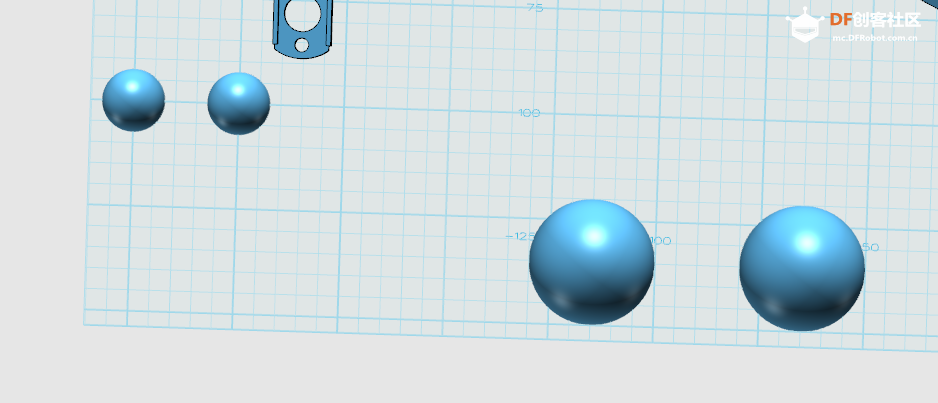
3. 球由于市场上的球要么就是体积过于太大放不到球场里,要么就是质量太大球杆打不动,所以我们决定自己打印小球。为了方便哈士奇识别到小球,我们使用了区别于球场颜色白色的红色进行打印小球。
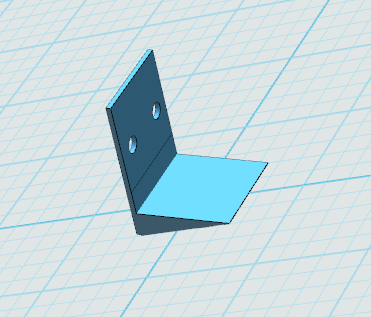
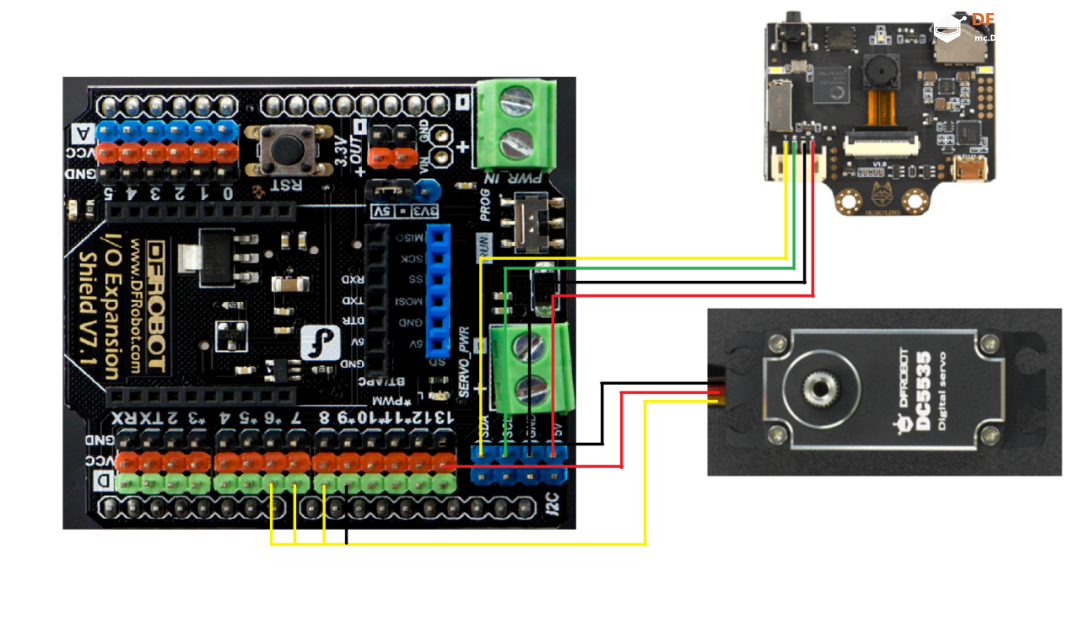
4. 哈士奇固定架为了将哈士奇固定到球场上,我们设计了一个哈士奇固定架,并使用3D打印机打印出来。同时,为了使哈士奇有一个良好的视角,让摄像头可以90度朝下,便于摄像头识别球的位置。
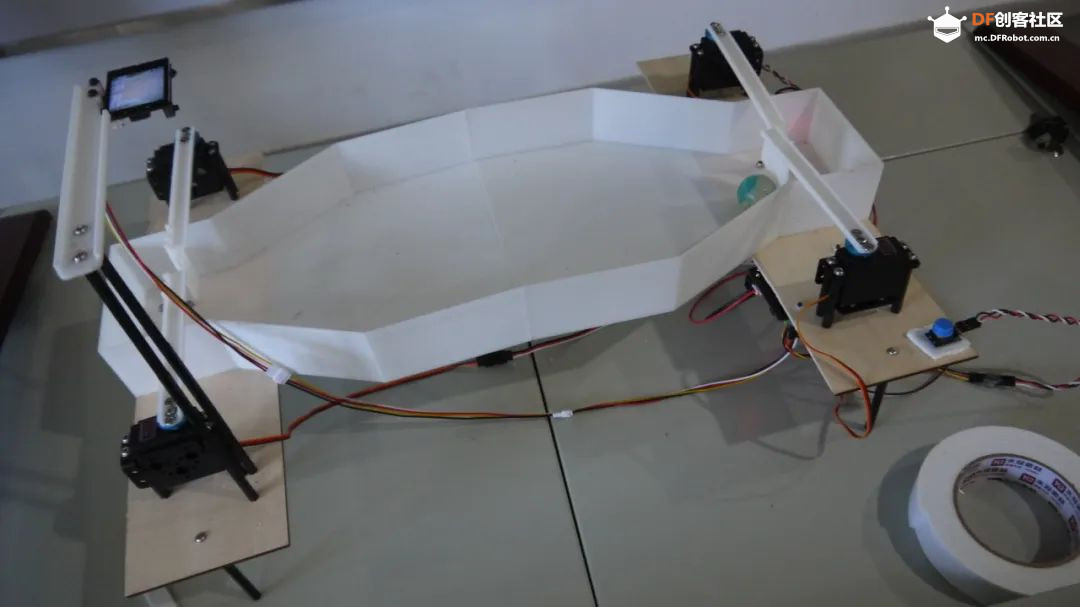
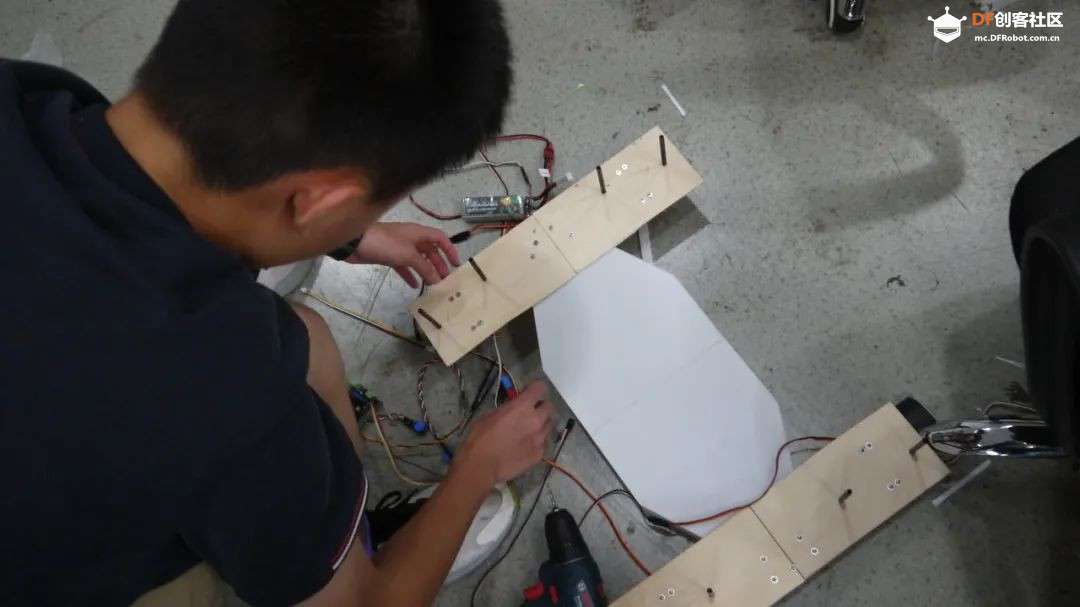
(二)安装部分1. 球场3D打印完成后,我们用烙铁头将球场的两部分黏合在一起,并在球场的两头安装木板,便于安装控制球杆的舵机和主控板等。 2. 球杆我们使用3D打印件作为球杆。为了固定球杆,我们将其用螺丝安装到了舵盘上,再由螺丝装到MD960上,再由舵机控制将球打出去。 3. 整体结构我们将之前用电烙铁焊接在一起的球场的两边固定在木板上。由于为了获得更大的速度,我们使用了130mm的球杆,这也意味着舵机将安装在离球场较远的位置。由于我们只有200*200mm的木板,加之我们不需要很长的木板,我们将木板锯成两半,再用AB胶粘在球场的两端。由于球场有一定的倾斜角度,我们还用AB胶堆在了木板的前端,再用螺丝打孔固定,使木板与地面平行。为了进一步保证球场平稳,我们又用铝柱将球场架高。接着,我们又将舵机用螺丝固定在木板上,使球杆中间有一道球可以刚好滚过的缝。最后,我们用胶把两个按钮分别安在了两个舵机旁边,又将哈士奇摄像头用3D打印件固定在了对面,完成了结构的搭建。
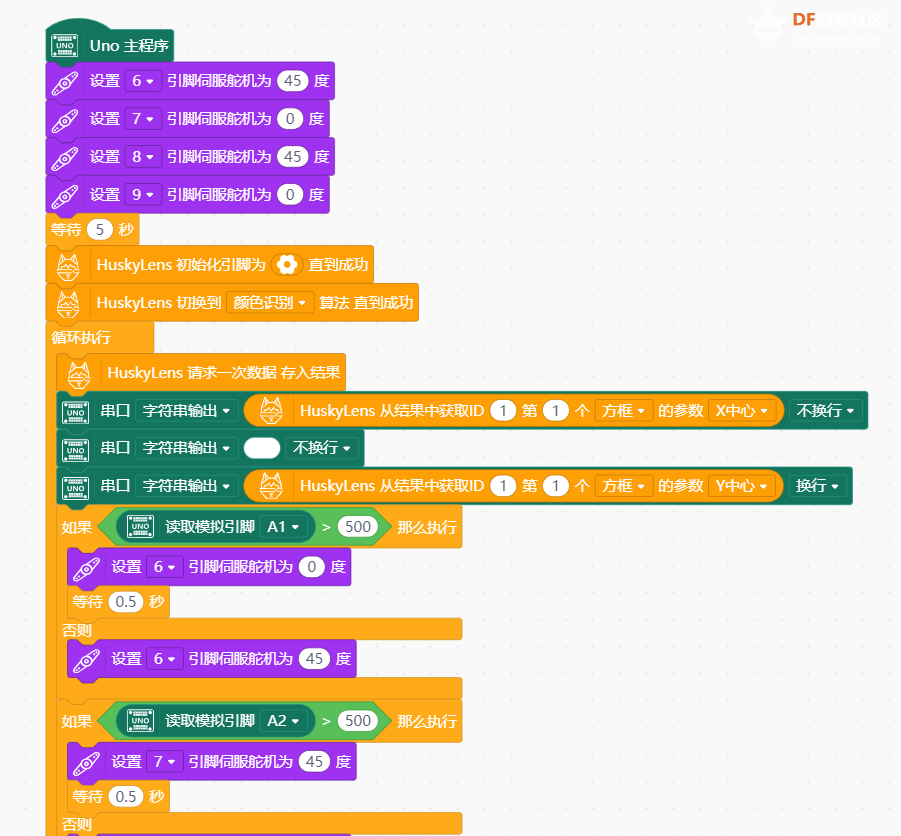
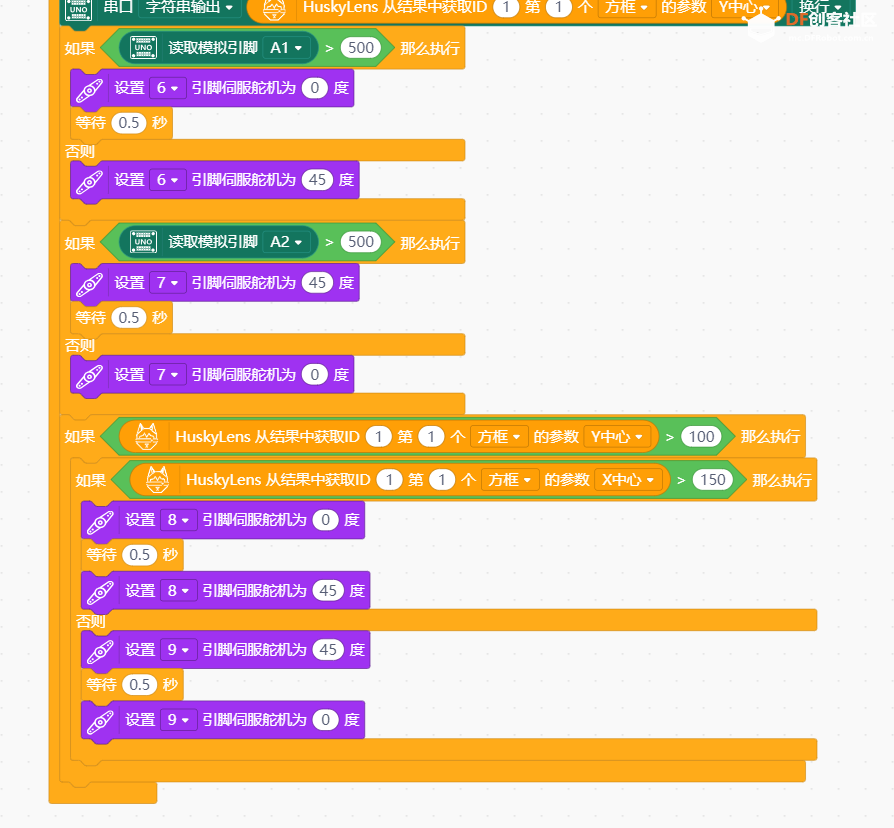
3 程序编写在最开始时,我们对哈士奇摄像头进行了初始化,并设置了5秒的延时。 我们测试了按钮按下与不按时测试到的数值,用于控制舵机。通过程序,我们可以使舵机在按下按键时将球打出。同时,我们测试了球在桌边和右边时哈士奇摄像头读到的值,当值在一定范围时,就分别控制不同舵机旋转。
4 功能简述我们的足球机器人可以由人控制左边的两个球杆,与对面由哈士奇摄像头控制的两个舵机对打,使一个人就可以进行游戏。
5 机器调试我们最开始时发现舵机哪怕使用了9伏的大电压,也无法很好地打出球。我们认为,这是应为球杆太短,使其在挥动时速度小但是力量大。而我们并不需要很大的力,于是我们重新设计了更长的球杆使其可以刚好将球打上去。可是,我们的球太小了,容易从缝隙中穿过,于是我们有使用了环氧树脂做了一个更大的球。之后,我们又发现,摄像头那边的舵机挥杆太早了,这导致球无法被正常击打。于是我们为舵机加了延时,解决了问题。
展示视频往期推荐- [比赛优秀作品] AI打鼓小能手——儿童趣味音乐鼓 |

5c2a5d8a7694e765dbabe74ffc1469f4.zip
16.83 MB, 下载次数: 4606
黄宇峣 赵梓铎 电子足球



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






