|
8282| 3
|
[项目] 快乐智造营 | 19 桌面抓棍机 |

本帖最后由 怀若谷 于 2024-4-2 08:15 编辑  图1(来自网络) 为了锻炼孩子的专注力、反应能力和手眼协调能力,家长们会购买一款叫做“眼疾手快抓棍机”的训练器。这个机器一般是磁吸式的,工作原理是:给所有的电磁铁通电,使之产生磁力,吸住棍子(棍子一端装有铁片),然后按一定的时间间隔随机关闭某个电磁铁的电源,棍子会以随机的顺序掉落下来。今天,让我们用创客技术来制作一个桌面抓棍机吧。 按下重置按钮,吸盘产生吸力,这时可以将棍子嵌有铁片的一端接触吸盘,棍子则会被吸住。按下启动按钮,吸盘吸力消失,棍子会以随机的顺序掉落下来。 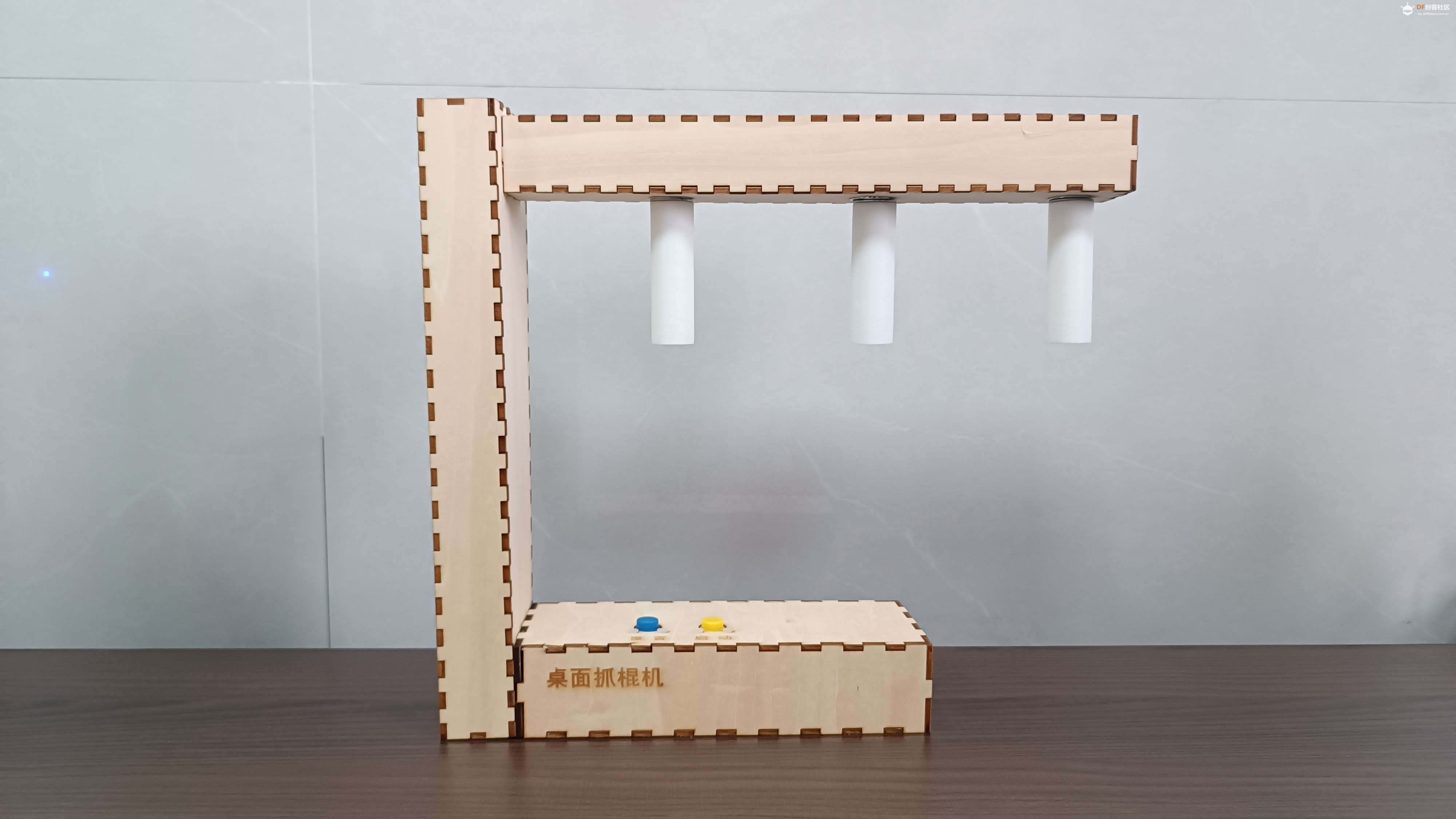 图2 演示视频硬件清单 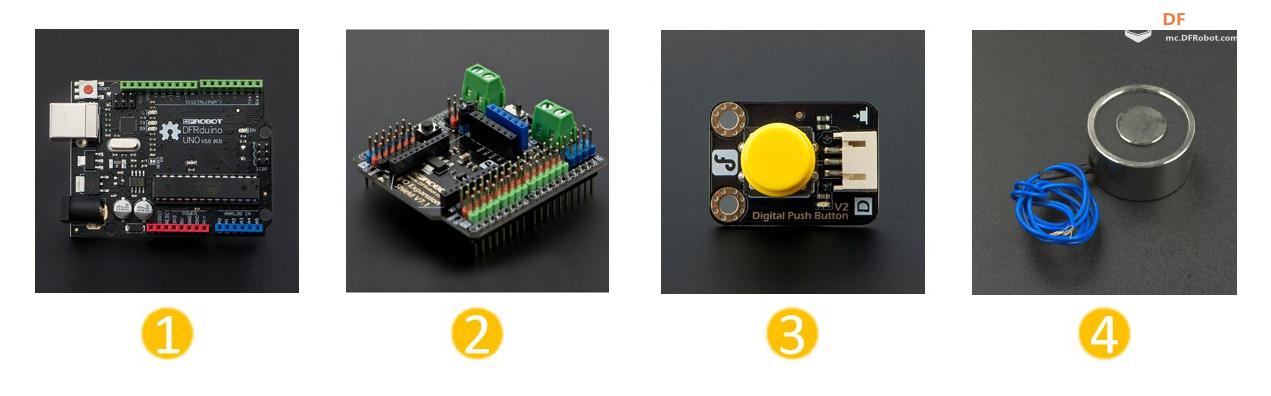 图3 本作品使用到的硬件材料主要有: 1. Arduino Uno 1块 2. IO扩展板 1块 3. 数字按钮模块 2个 4. 电磁铁 3个 其他材料  图4 圆环形铁片 3个 一、硬件连接 将IO扩展板安装到主控板上,将两个数字按钮模块分别连接到D2和D3引脚,将三个电磁铁模块连接到D8、D9和D10引脚(电磁铁模块只有两根引线,接GND和信号引脚即可)硬件连接示意图见图5。 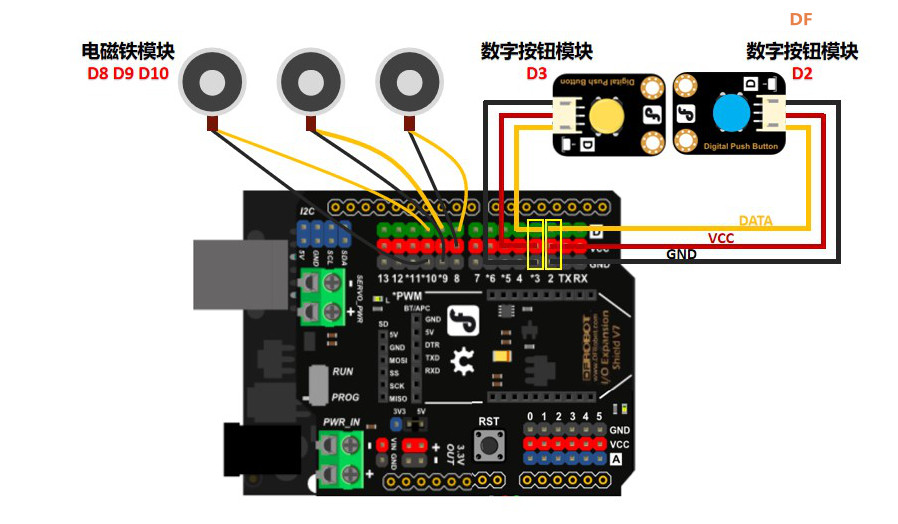 图5 注意:由于后面的组装环节中电磁铁模块与主控板间的距离较远,需要采用较长的连接线使长度满足实际使用需求。实物连接图见图6。 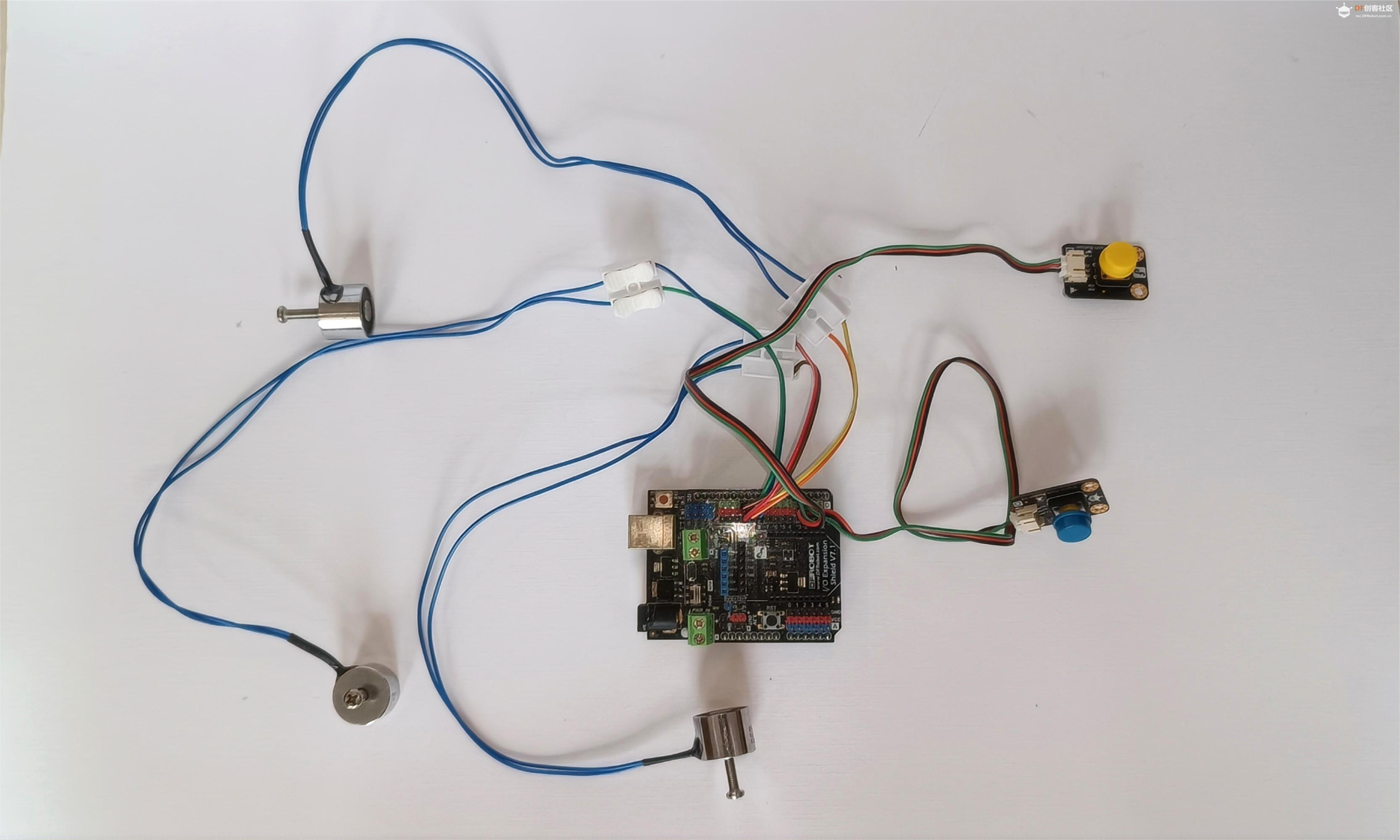 图6 二、编写程序本项目程序采用Mind+软件在上传模式下编写,分为三个部分:主程序、引脚中断程序、释放棍子子程序。 (一)主程序主程序主要分为初始化部分和主循环部分。编程思路:程序启动后,先将三个电磁铁初始化设置为低电平;然后循环执行:侦测连接到D3引脚的数字按钮模块输入信号是否为1,如条件成立则执行释放棍子子程序。该部分程序见图7。 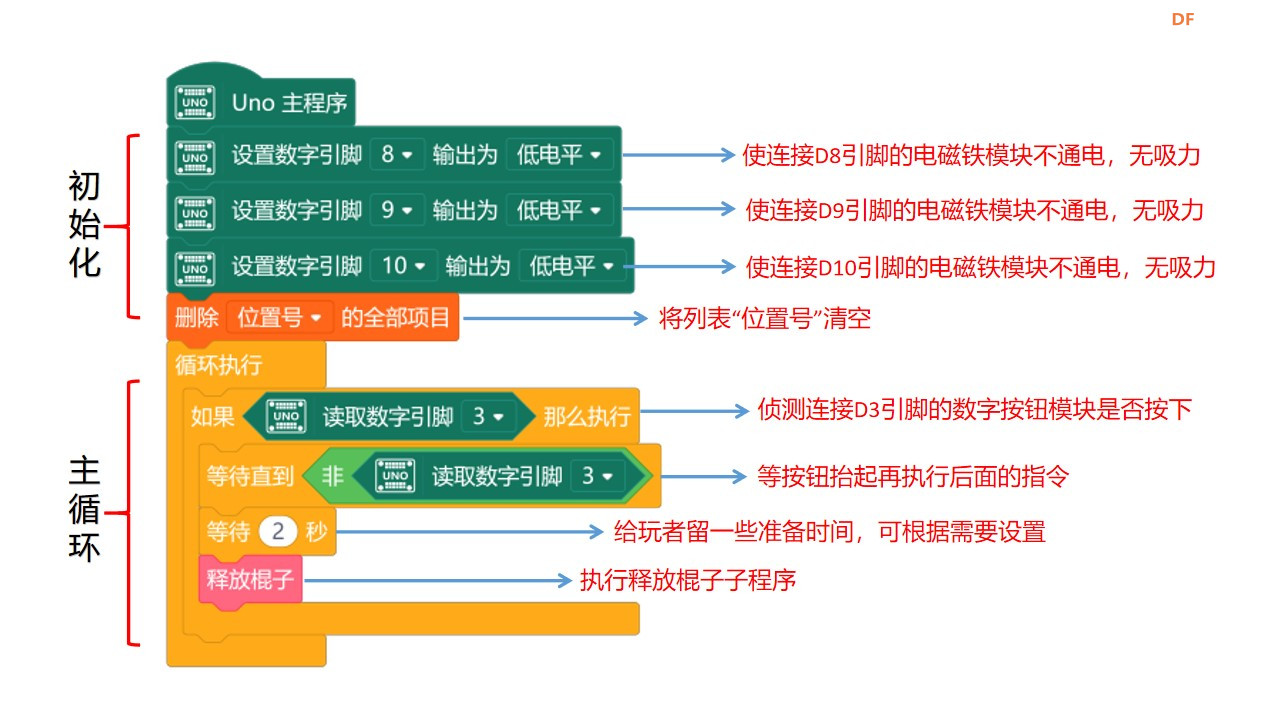 图7 (二)中断引脚程序 该模块的功能很简单,就是实现当按下连接到D2引脚的数字按钮模块后将三个电磁铁模块设置为高电平。该部分程序见图8。 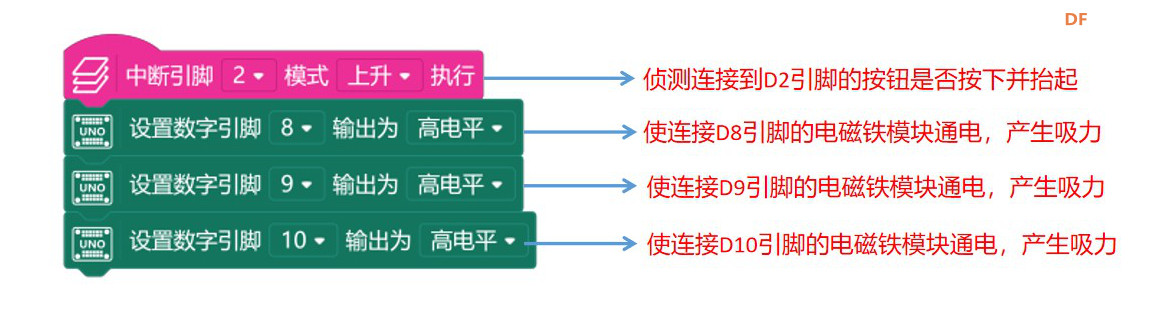 图8 (三)释放棍子子程序该子程序的功能是按随机顺序将三个电磁铁模块设置为低电平。由于Mind+的图形化模式下,引脚号不支持使用变量,而且三个电磁铁释放棍子要随机且不能重复,所以需要采用一些算法来实现。在本案例中,是这样来实现的:建立一个列表”位置号”,用来存放三个电磁铁模块的编号(即1、2、3);然后使用随机数命令来确定列表中的某项数据为当前需要释放的电磁铁模块编号;将该编号的电磁铁模块置为低电平,磁力则消失;将列表的该项数据删除,再进行下一轮循环。循环执行三次后,3个电磁铁模块都会被置为低电平。该部分程序见图9。 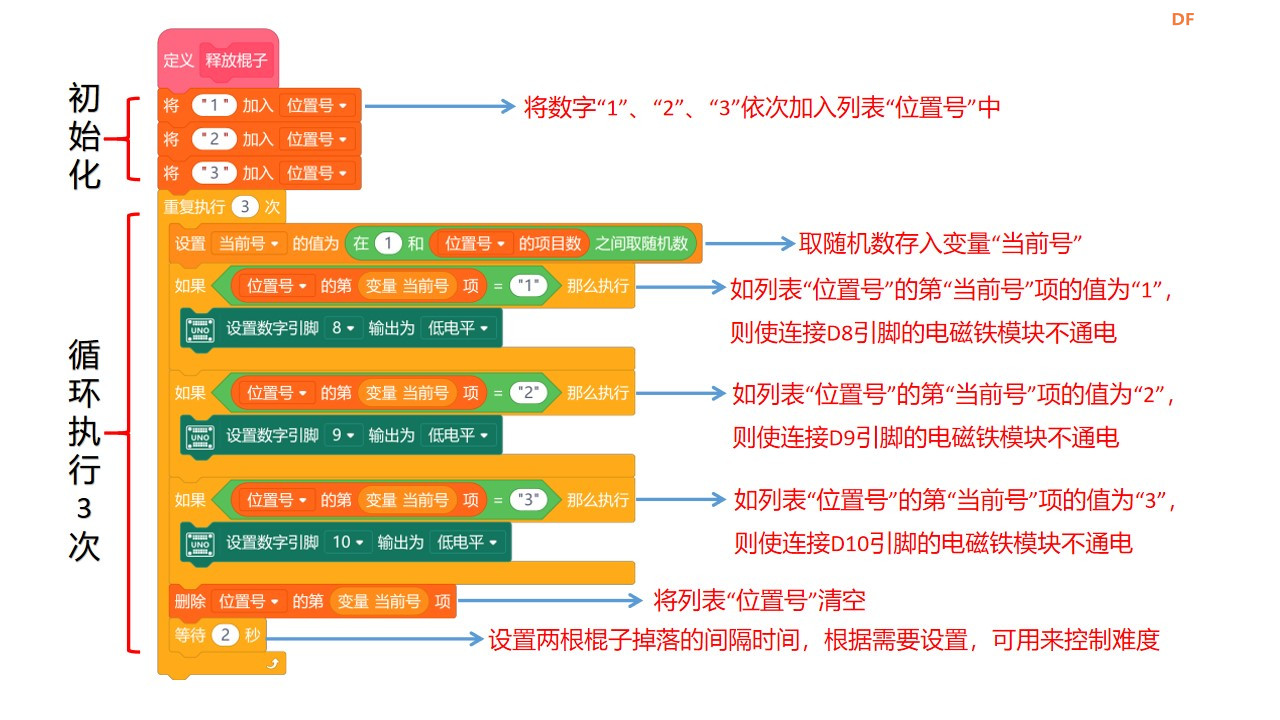 图9 三、主体结构设计本作品使用激光切割木件来制作结构和造型,图纸绘制使用了LaserMaker软件,使用的板材为3毫米厚的椴木板。图纸如图10所示(黑色为切割,橙色为浅雕)。 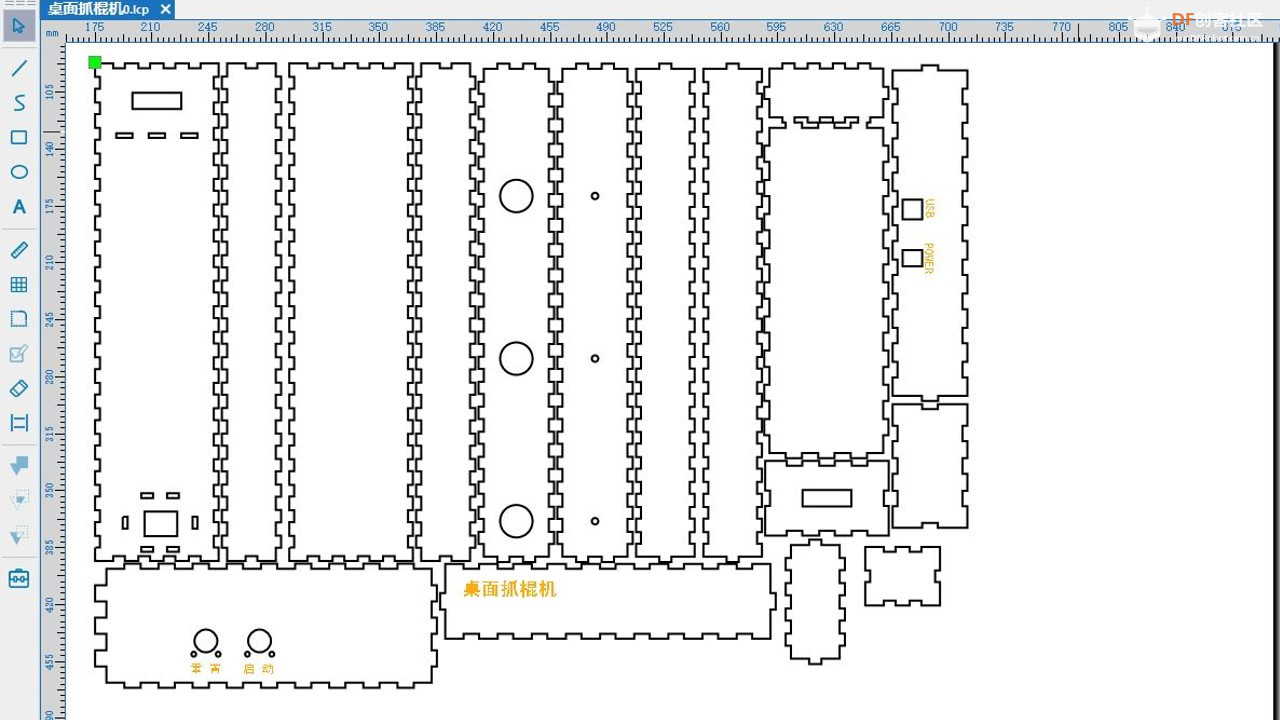 图10 图纸绘制好后,使用激光切割机进行切割加工(见图11)。 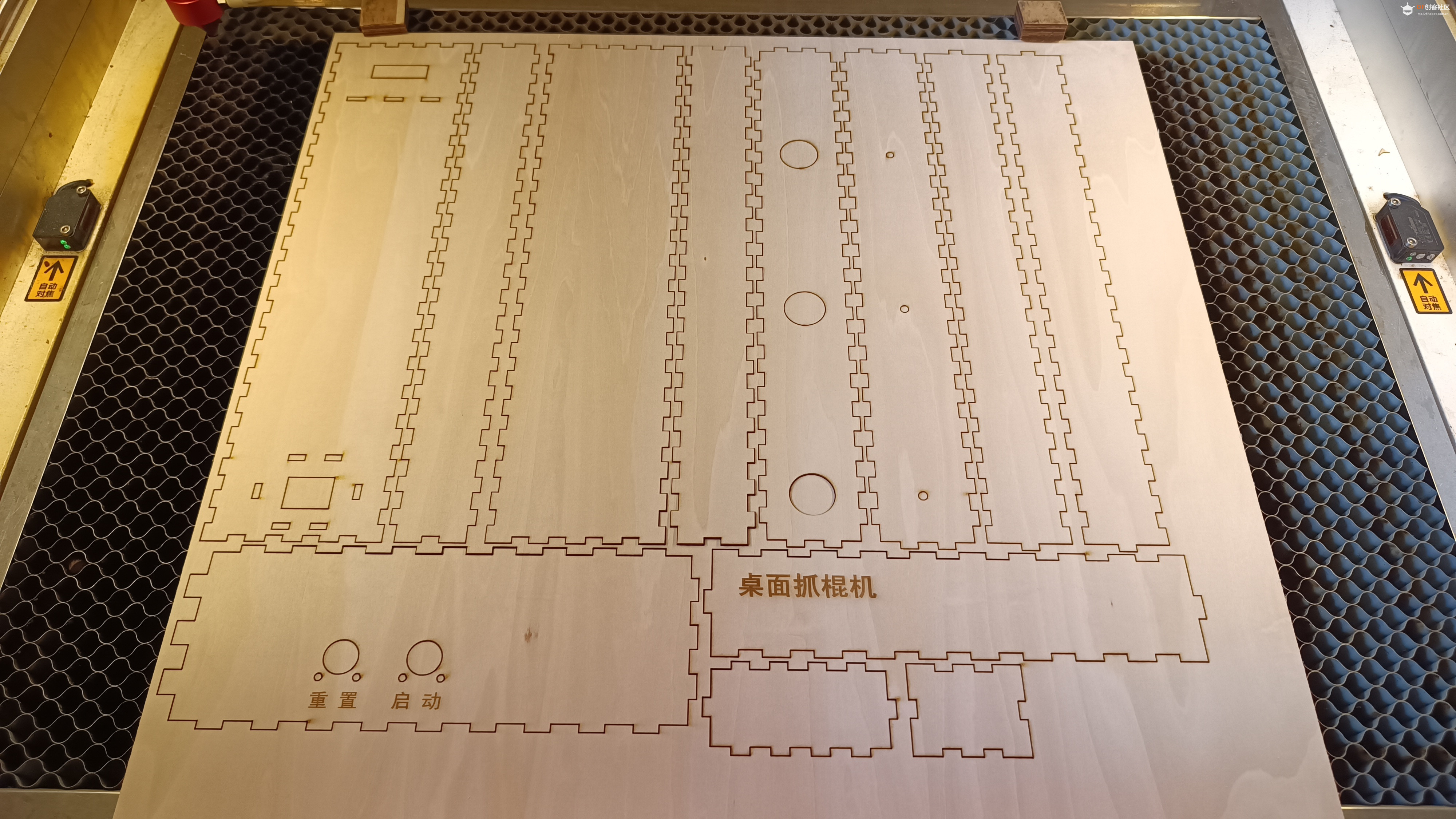 图11 四、棍子制作 1.使用3D建模软件Fusion360绘制一个空心圆柱体,一端设计有圆环形铁片连接结构。 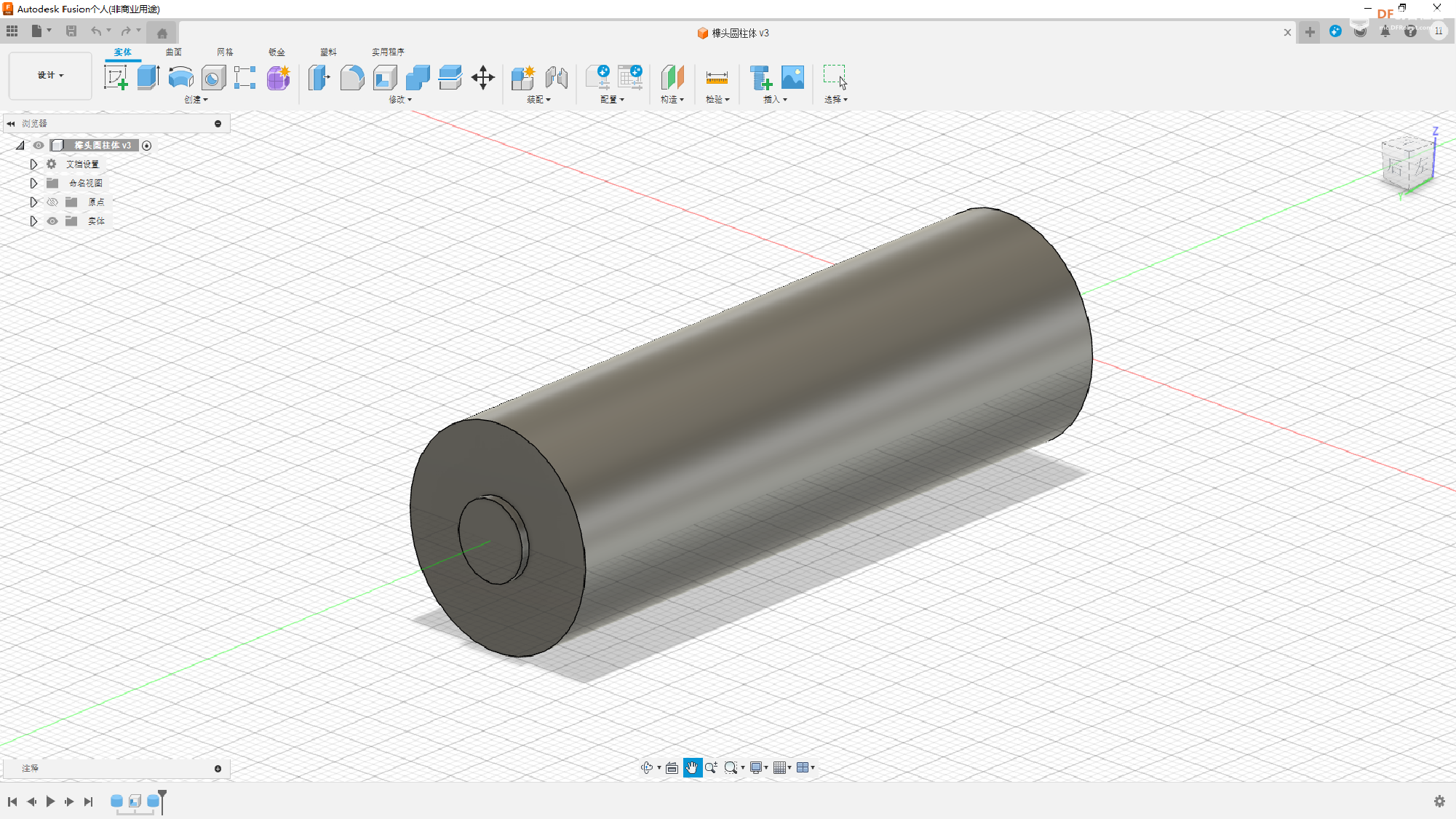 图12 2.使用3D打印机打印出棍子,打印数量根据电磁铁模块数量确定。 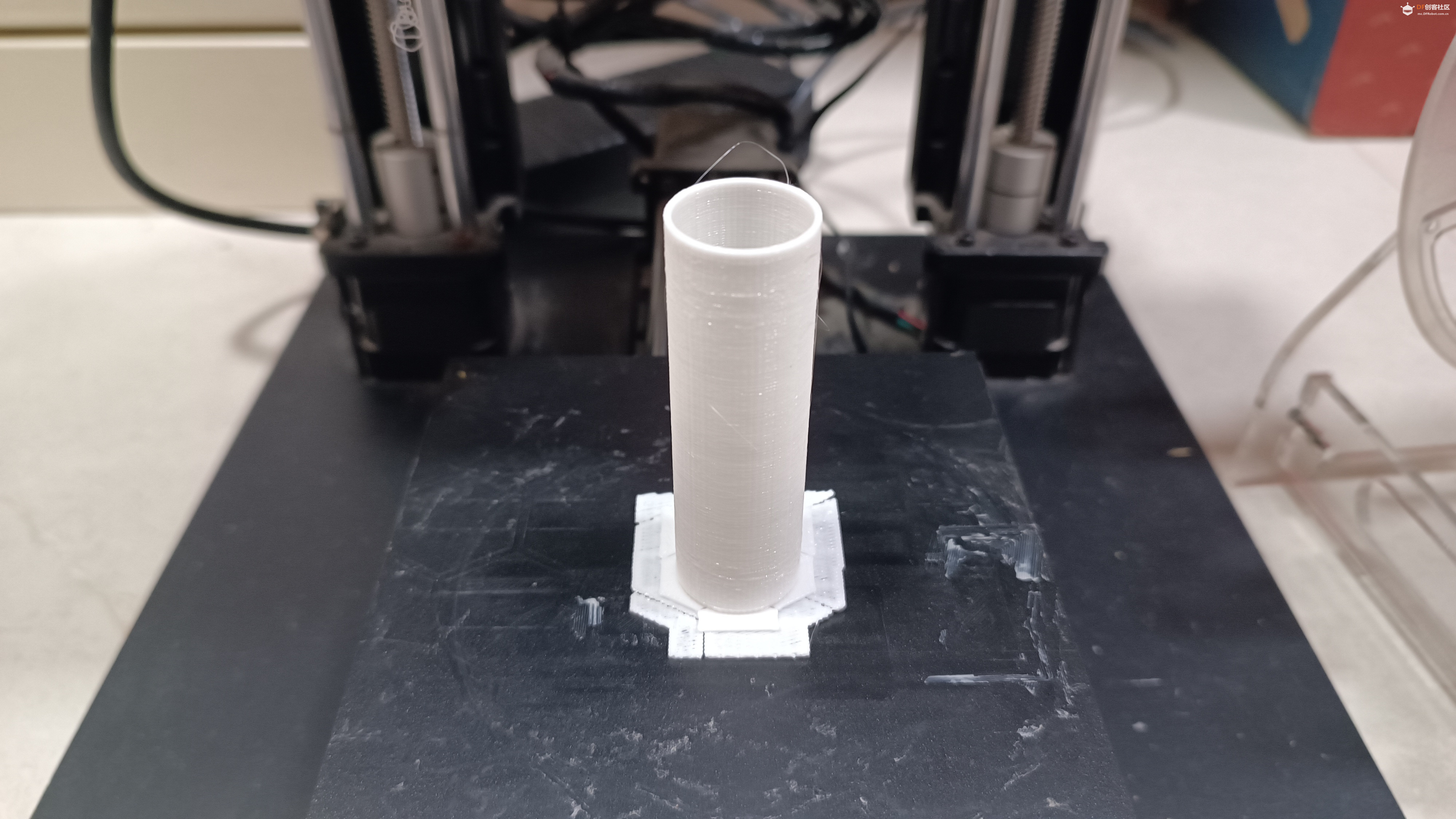 图13 3.将圆环形贴片卡到棍子一端,如不牢固可借助胶水粘结。 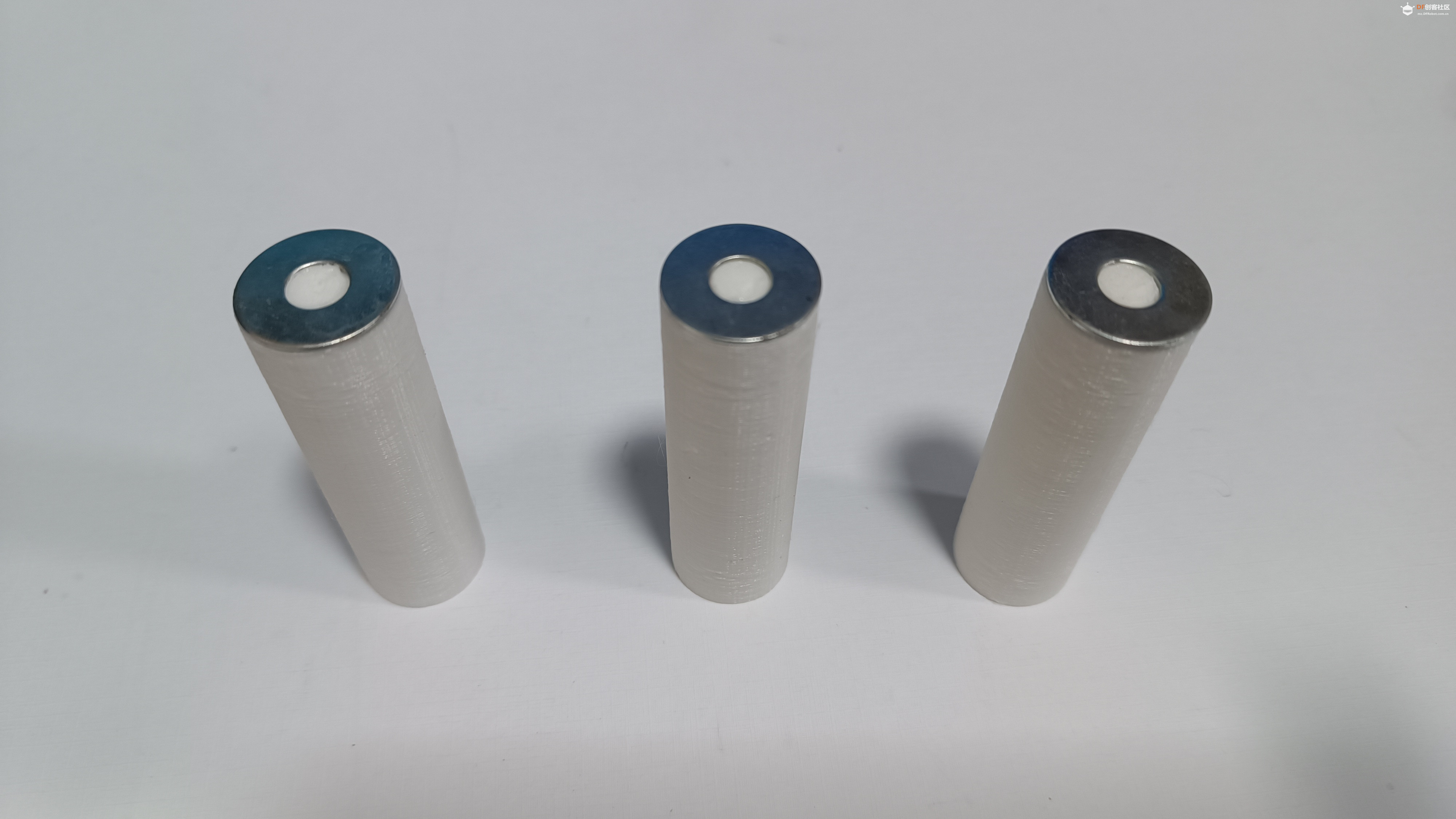 图14 五、组装成型1. 组装底盒(顶板暂不装)  图15 2. 安装主控板 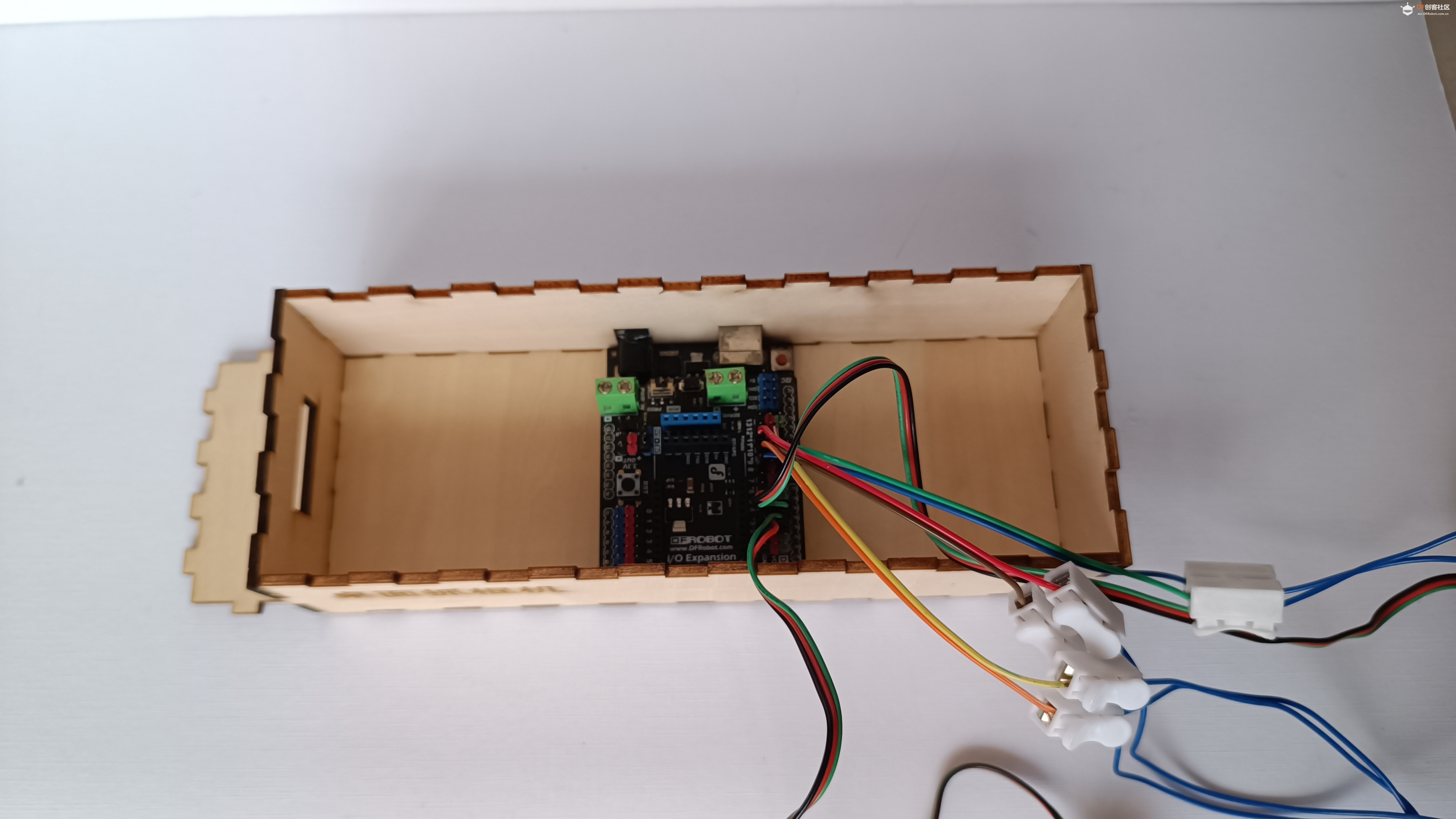 图16 3. 将数字按钮模块安装到顶板上 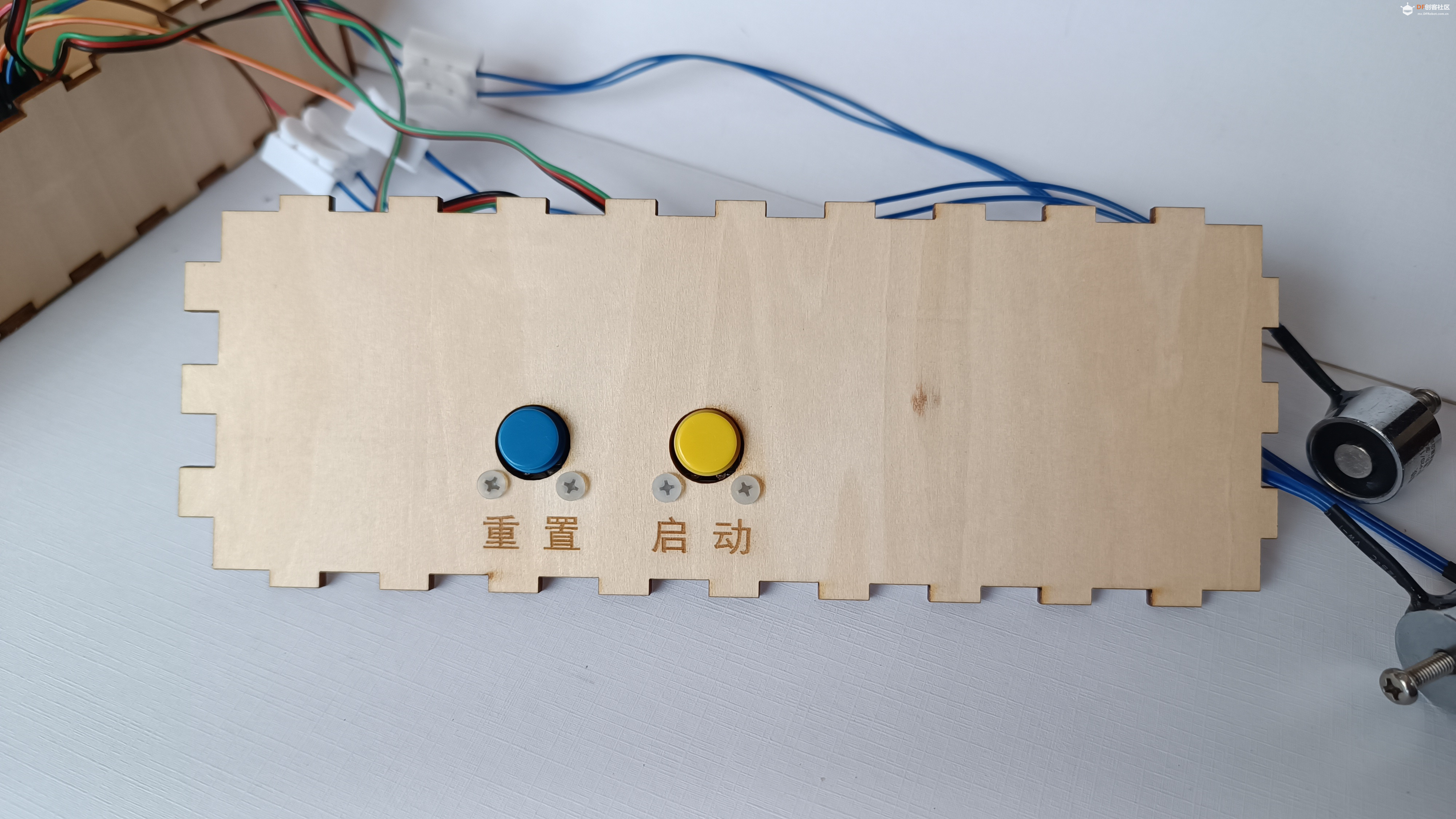 图17 4. 合上底盒顶板 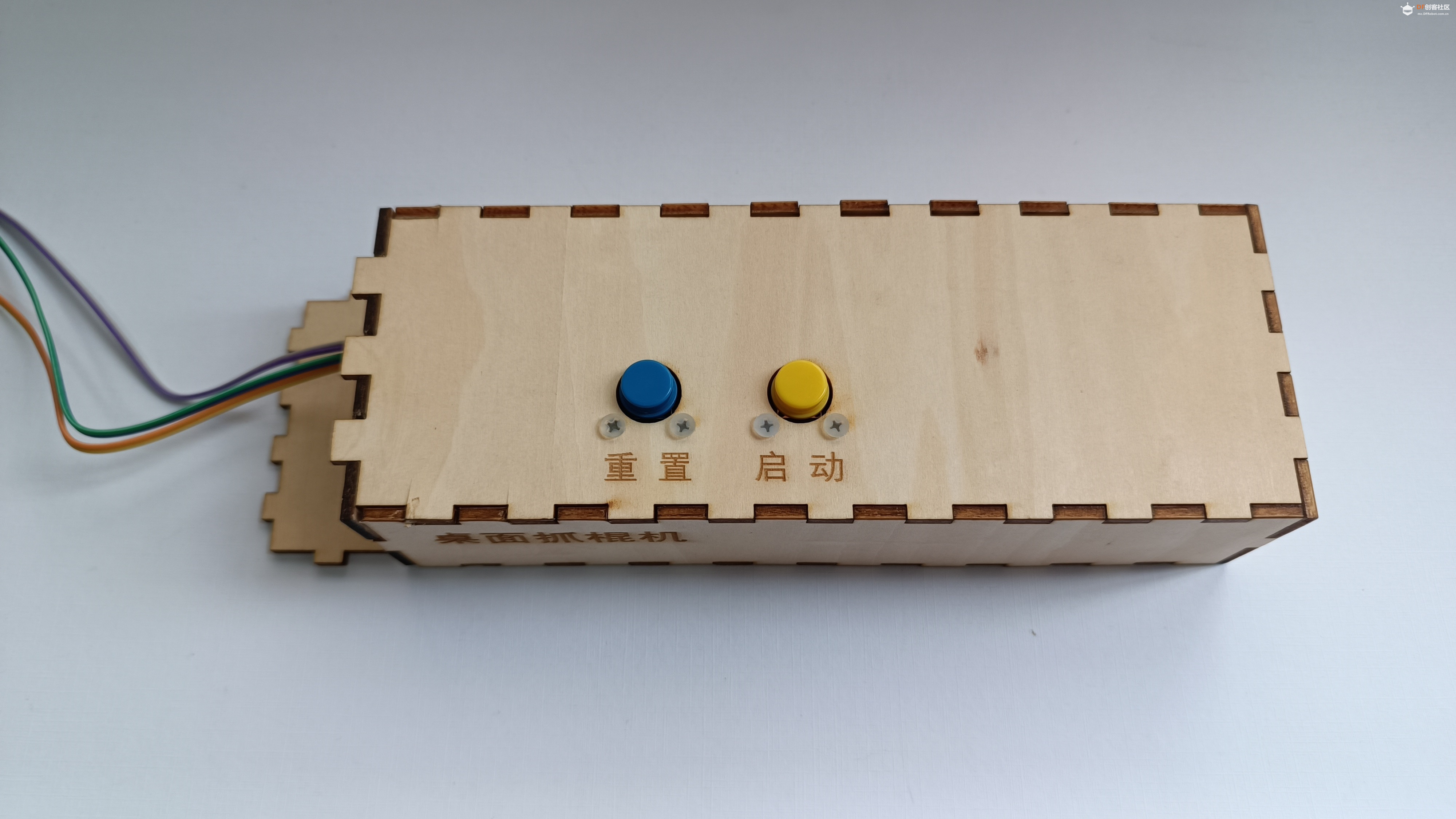 图18 5. 组装支柱体 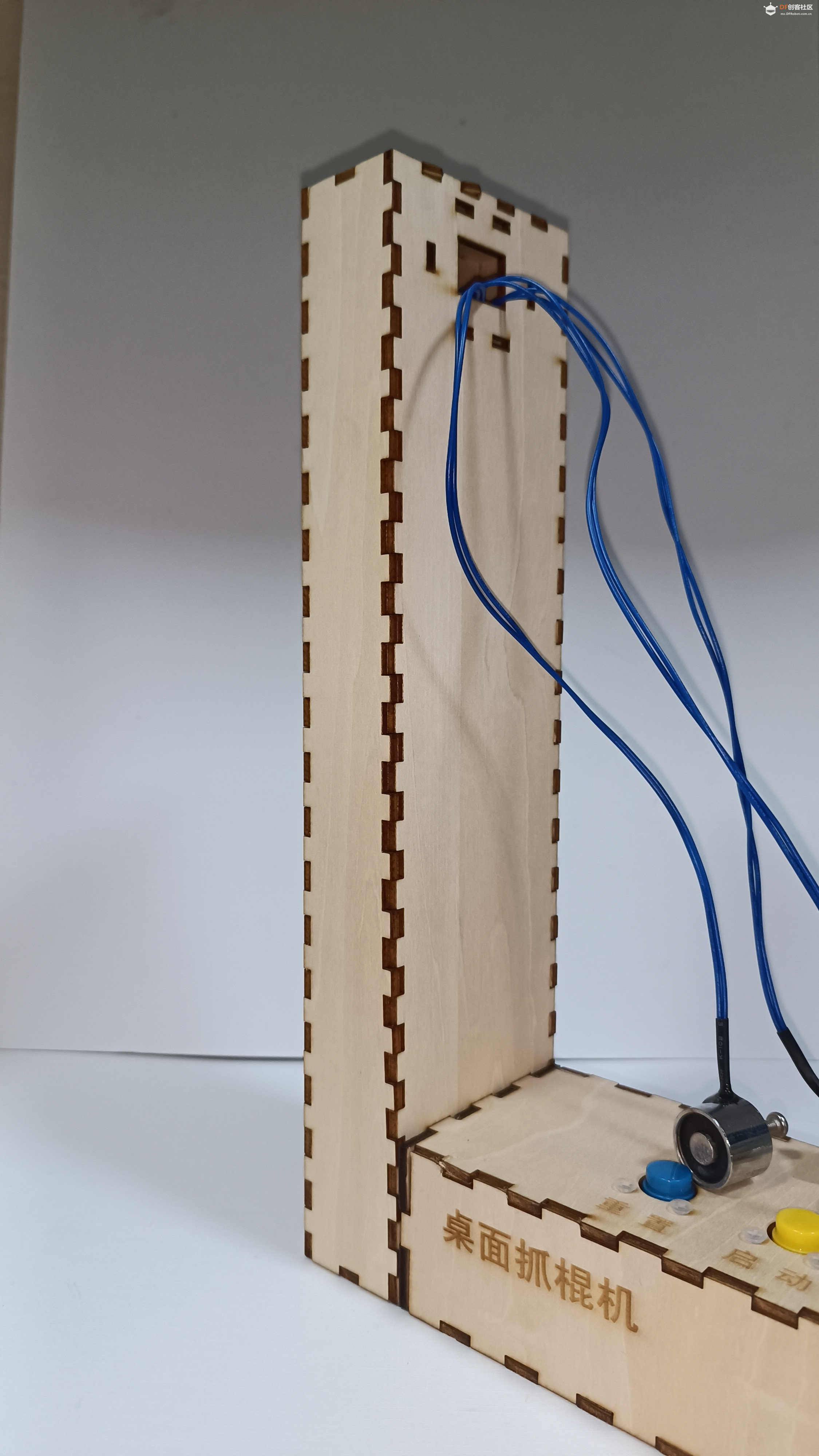 图19 6. 组装横梁体(部分) 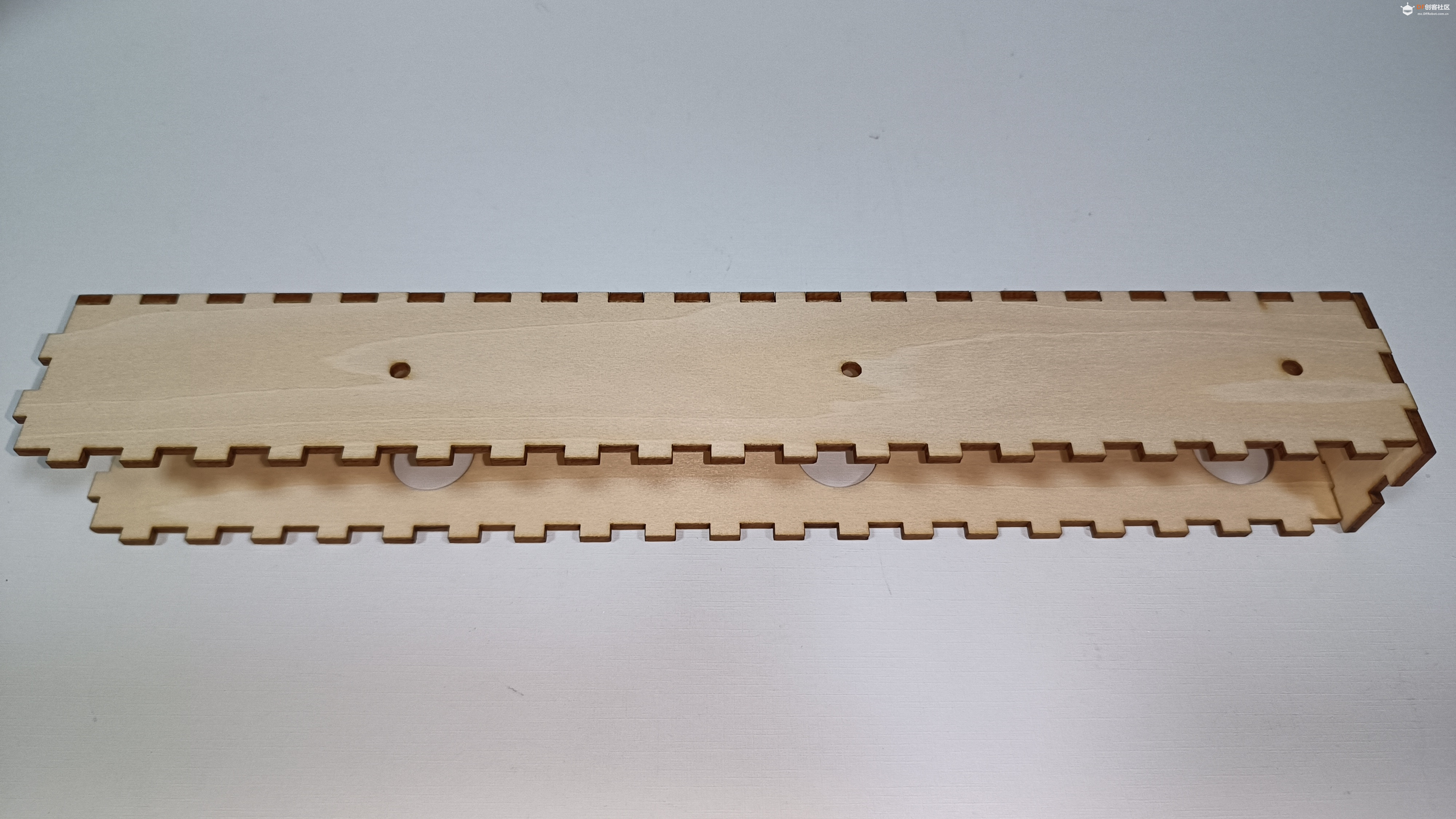 图20 7. 安装电磁铁模块 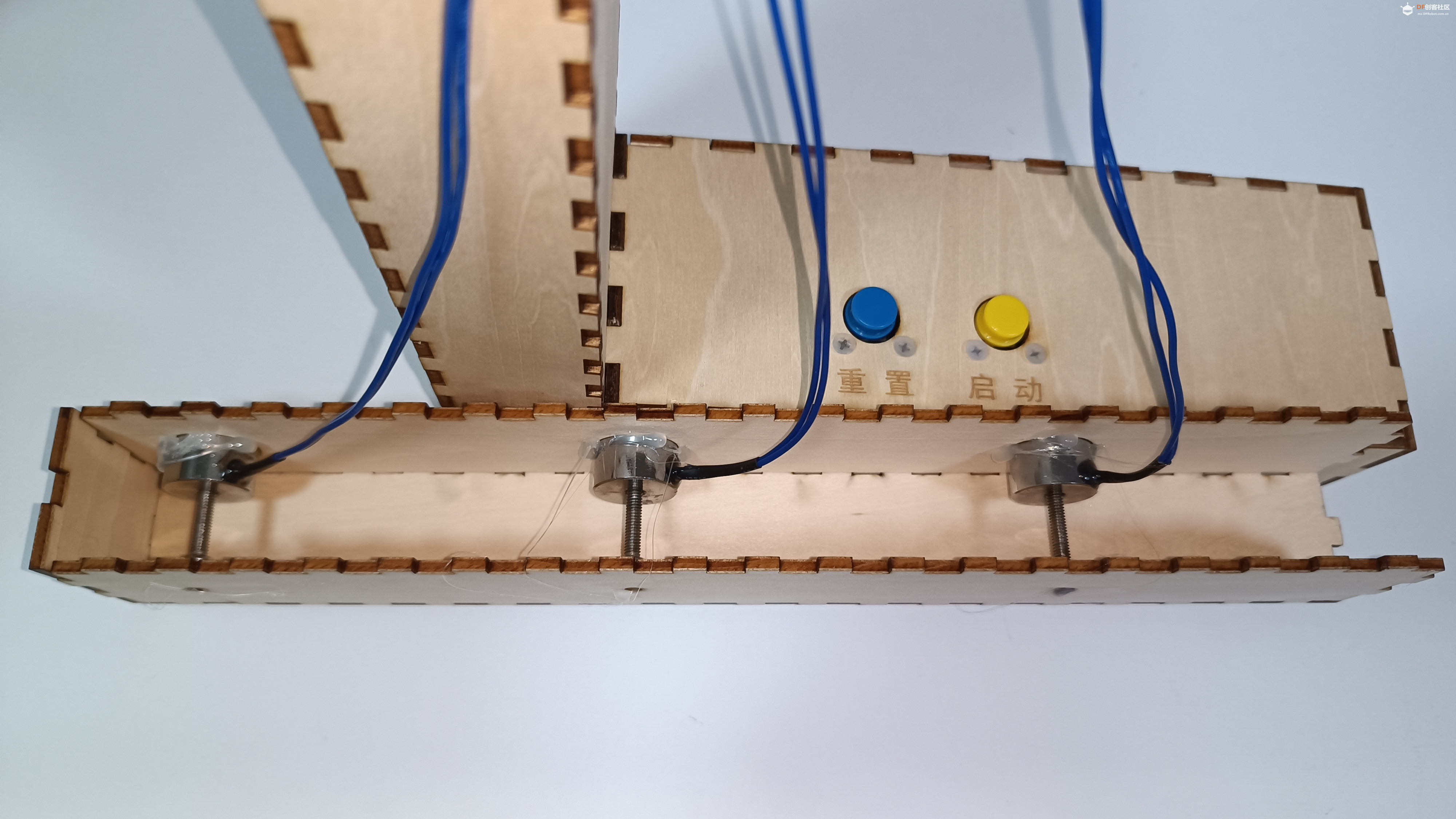 图21 8. 合上横梁体前板 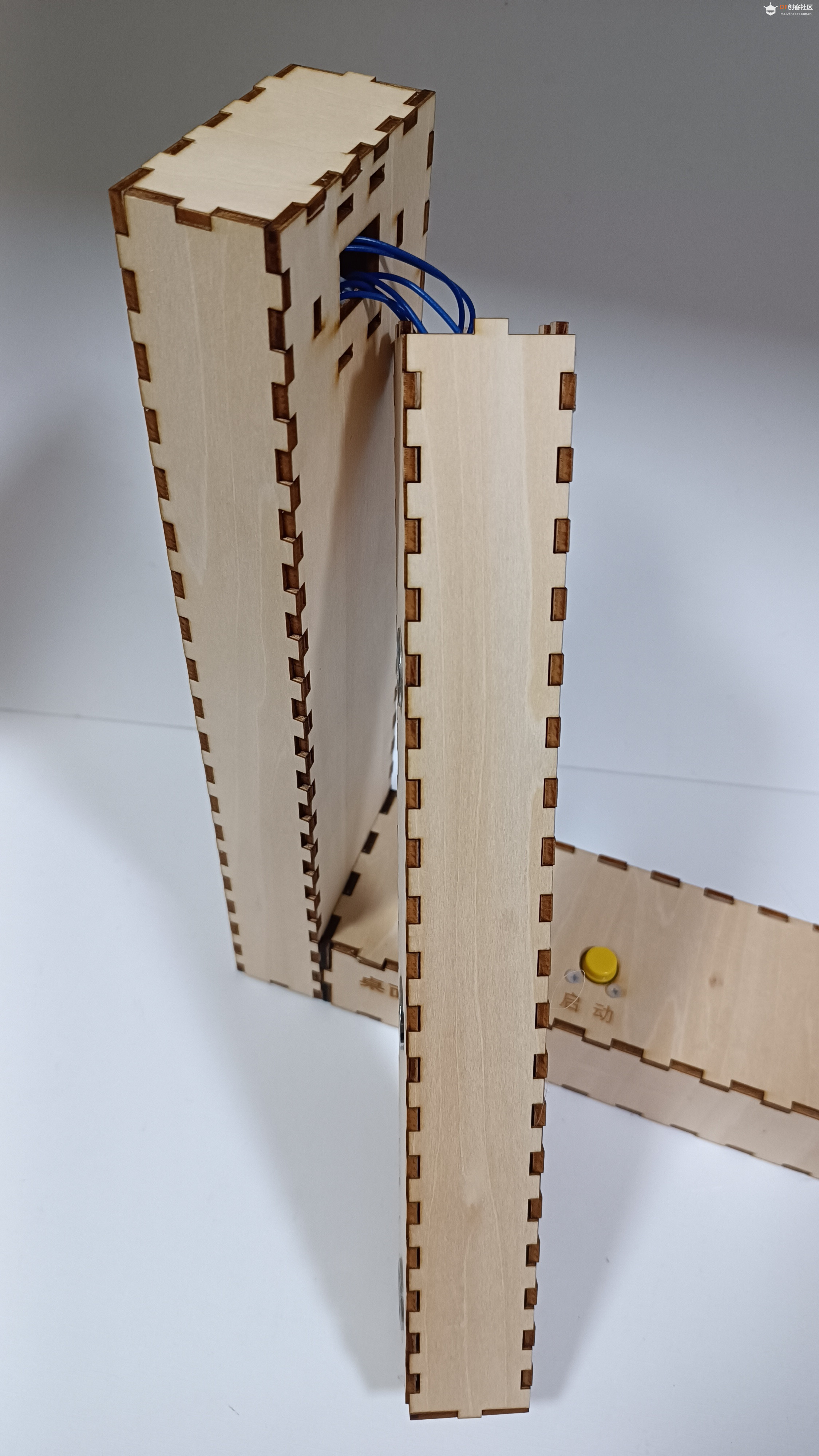 图22 9. 将横梁与支柱进行铆接  图23 六、调试优化 组装完成后,接上电源线通电,进行功能测试。可根据测试结果来修改程序参数以调整三根棍子掉落之间的时间间隔,以保证完成任务的可行性,同时应具有一定的难度。 总结反思 本作品作为一个教学案例,只实现了一些基本功能,而且在使用中还存在一些问题。它还有很多可以改进的地方,比如:可以增设速度调节的功能;可以使用其他材料来制作棍子,以降低下落速度和提升握感;支柱设计得更高一些或者整体改为悬挂式,使下落行程加大,增加游戏成功的机率。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







