|
4611| 2
|
[M10项目] 行空板M10化身积木机器人主控器 |

本帖最后由 怀若谷 于 2025-7-15 14:44 编辑 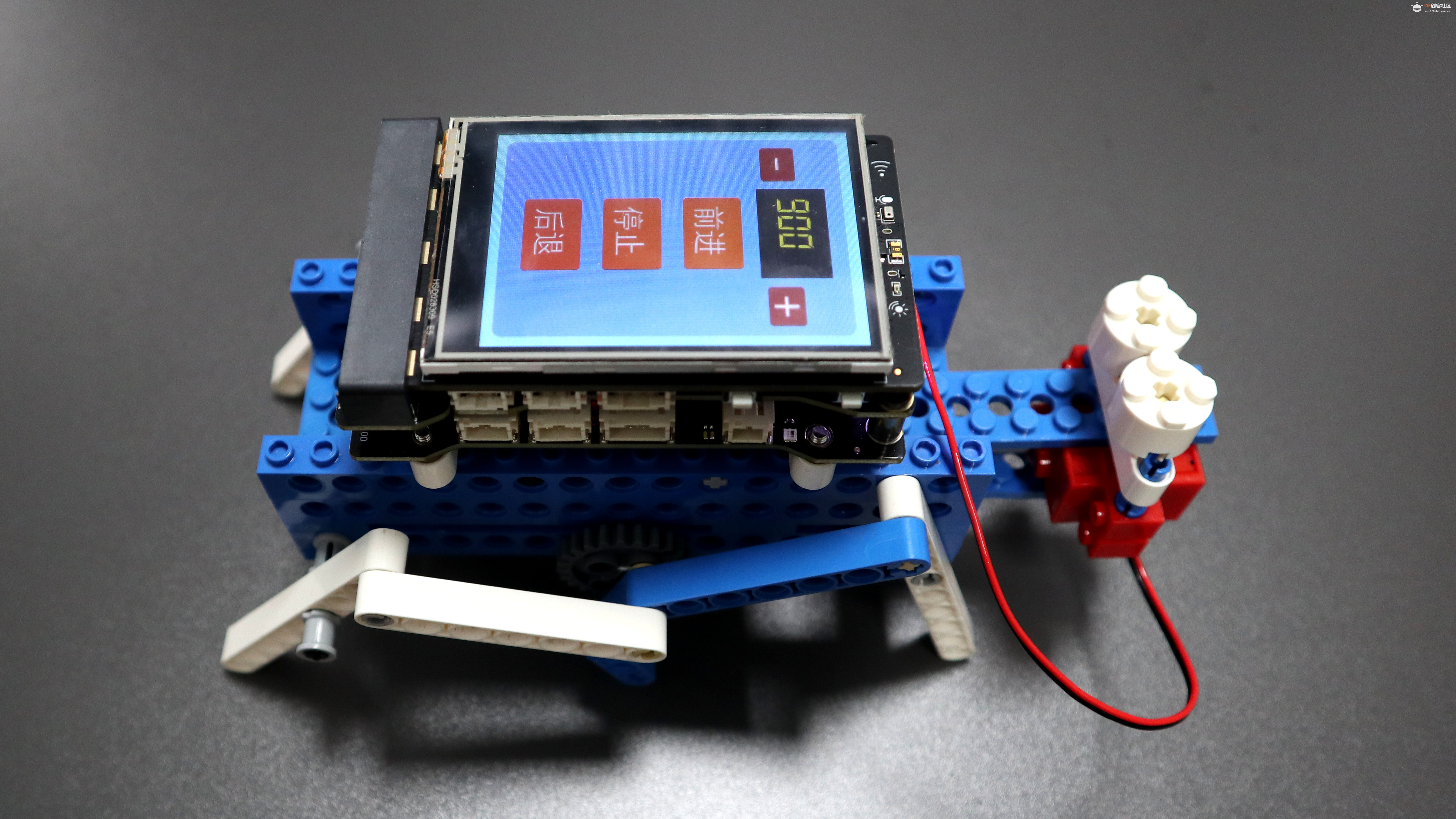 行空板自推出以来,受到了很多用户的好评。在很多科创类比赛中,都能看到它的身影。但在使用中,总感觉缺少了一款专用的带有锂电池的扩展板,最好是能叠装起来,制作作品会更加方便。毕竟,友商已有这种产品了。  在千呼万唤中,它来了!它被称为行空板M10扩展板组合,由电机IO扩展板+电池扩展板两块扩展板组成。和行空板M10组装起来后,变得十分厚重,美观度上有点减分。不过对于创客们来说,功能增强了,使用起来也更方便了。 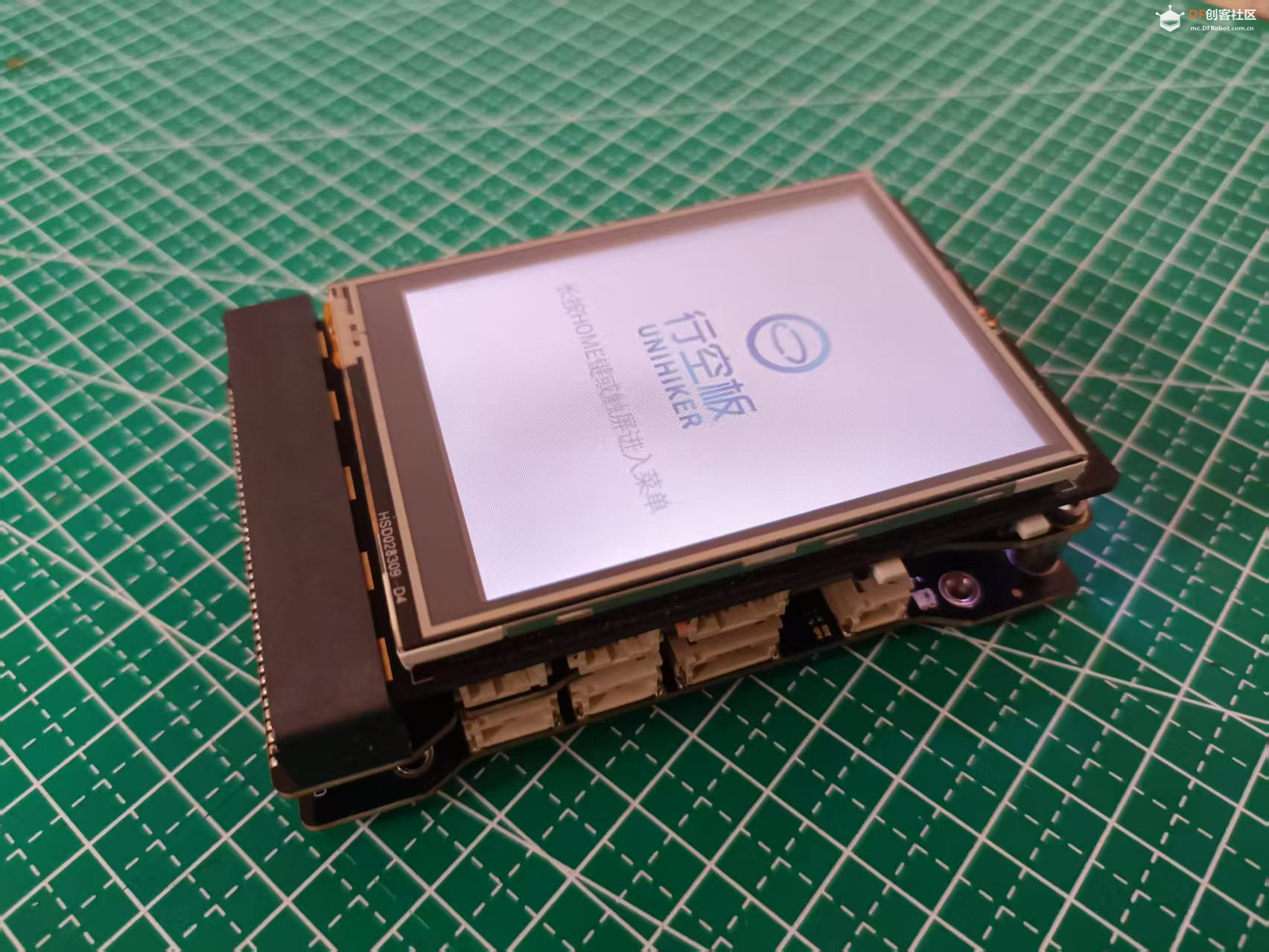 看产品说明中提到固定螺丝孔距与乐高积木件孔距一致,恰好这个学期在学校上积木机器人拓展课,就想着以后可以用行空板作为积木机器人的主控器,演示起来就更方便了。今天,试试让它们和一个六足行走机器人合体。 演示视频 【器材准备】 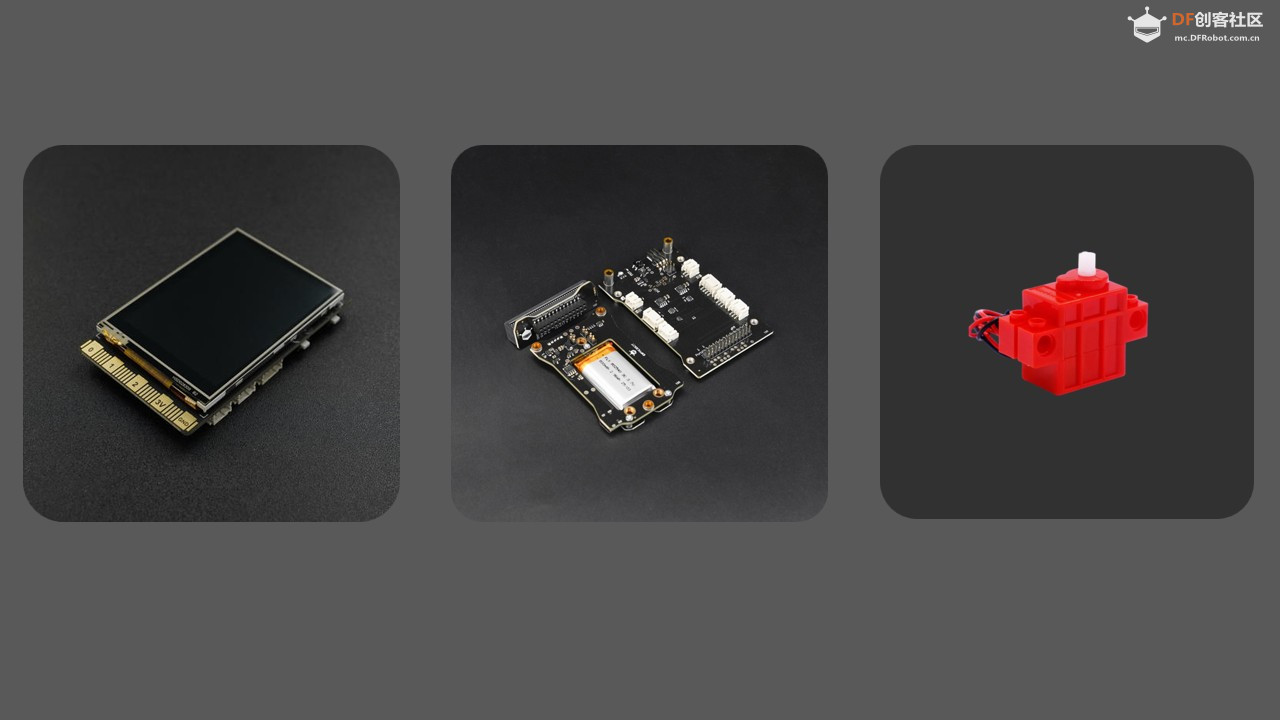 1. 行空板M10 1块 2. 行空板M10扩展板组合 1套 3. 减速电机(十字轴) 1个 【硬件搭建】 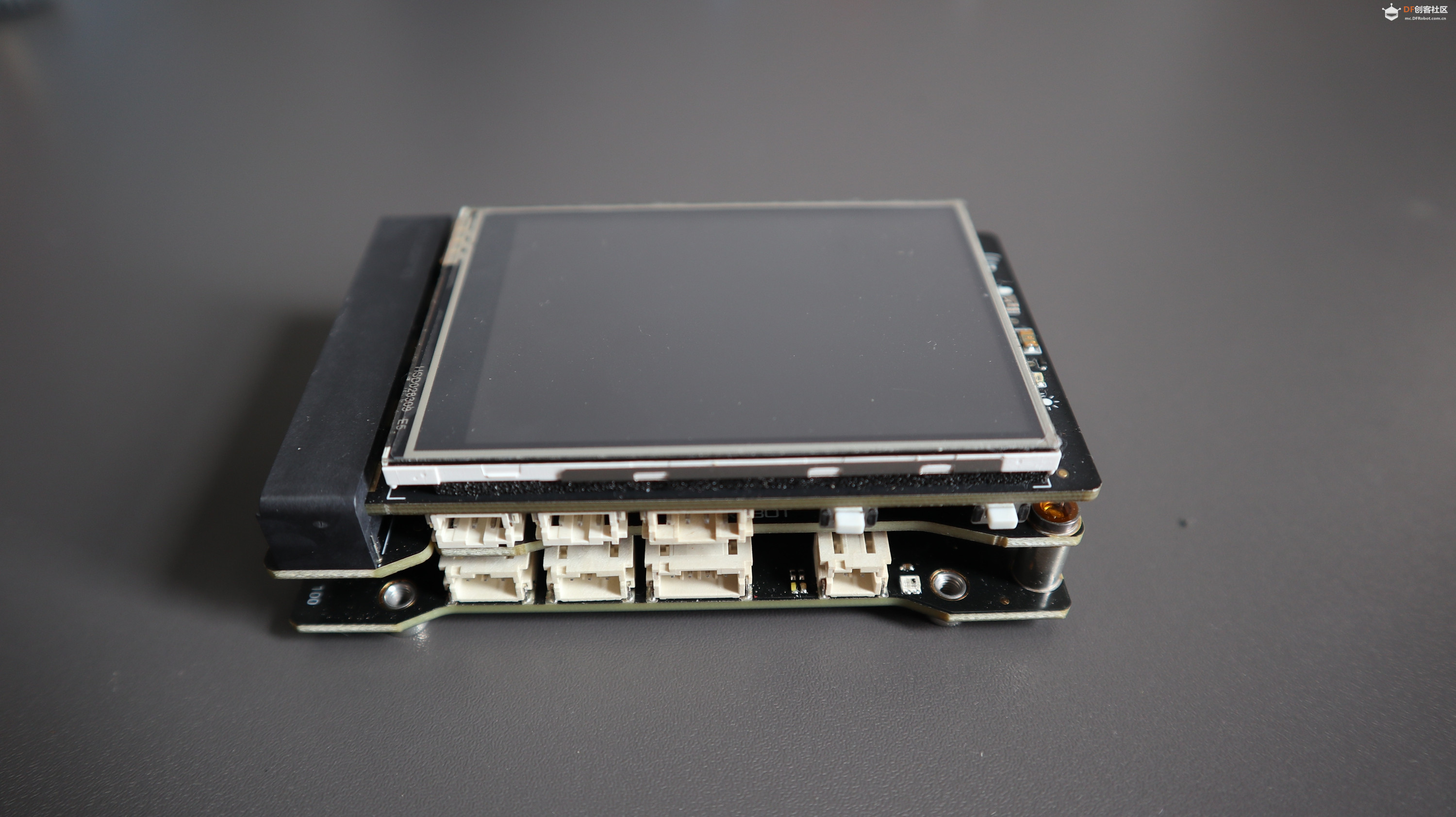 1. 将行空板与扩展板组合起来。 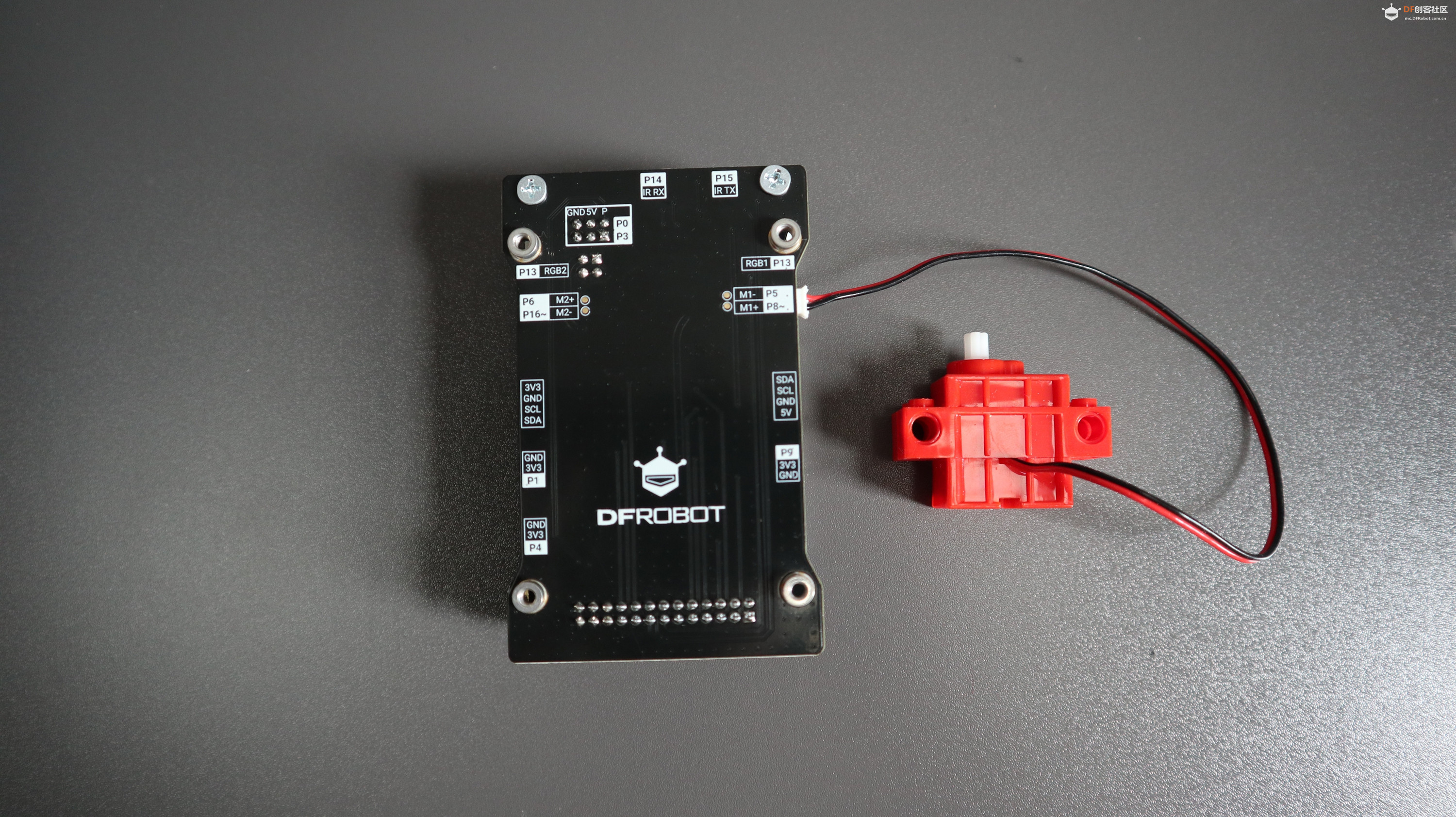 2. 将电机连接到扩展板的电机接口M1(P5&P8) 【程序设计】 以下程序使用MIND+ V1.8.1 RC3.0编写,编程模式为Python模式。  1. 绘制两张纯色图片作为背景。  2. 绘制一个黑色矩形,并在矩形内显示速度值。 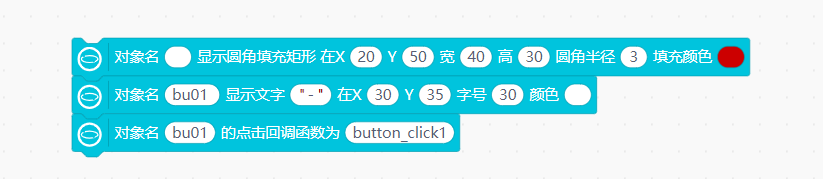 3. 在速度值显示区左边创建一个“-”按钮,用于减少速度值。  4. 在速度值显示区左边创建一个“+”按钮,用于增加速度值。  5. 创建一个“前进”按钮。  6. 创建一个“停止”按钮。  7. 创建一个“后退”按钮。  8. 建立变量“num”,用于记录速度值,设初始值为500。屏幕上不断显示更新后的变量值。  9. 编写“-”按钮对应的回调函数:对变量“num”进行减运算,并作约束处理。  10. 编写“+”按钮对应的回调函数:对变量“num”进行加运算,并作约束处理。 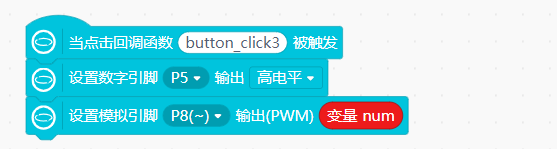 11. 编写“前进”按钮对应的回调函数:控制电机按+方向、以设定好的速度旋转。 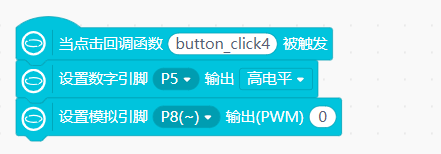 12. 编写“停止”按钮对应的回调函数:使电机停止旋转。  13. 编写“后退”按钮对应的回调函数:控制电机按-方向、以设定好的速度旋转。 【完整程序】 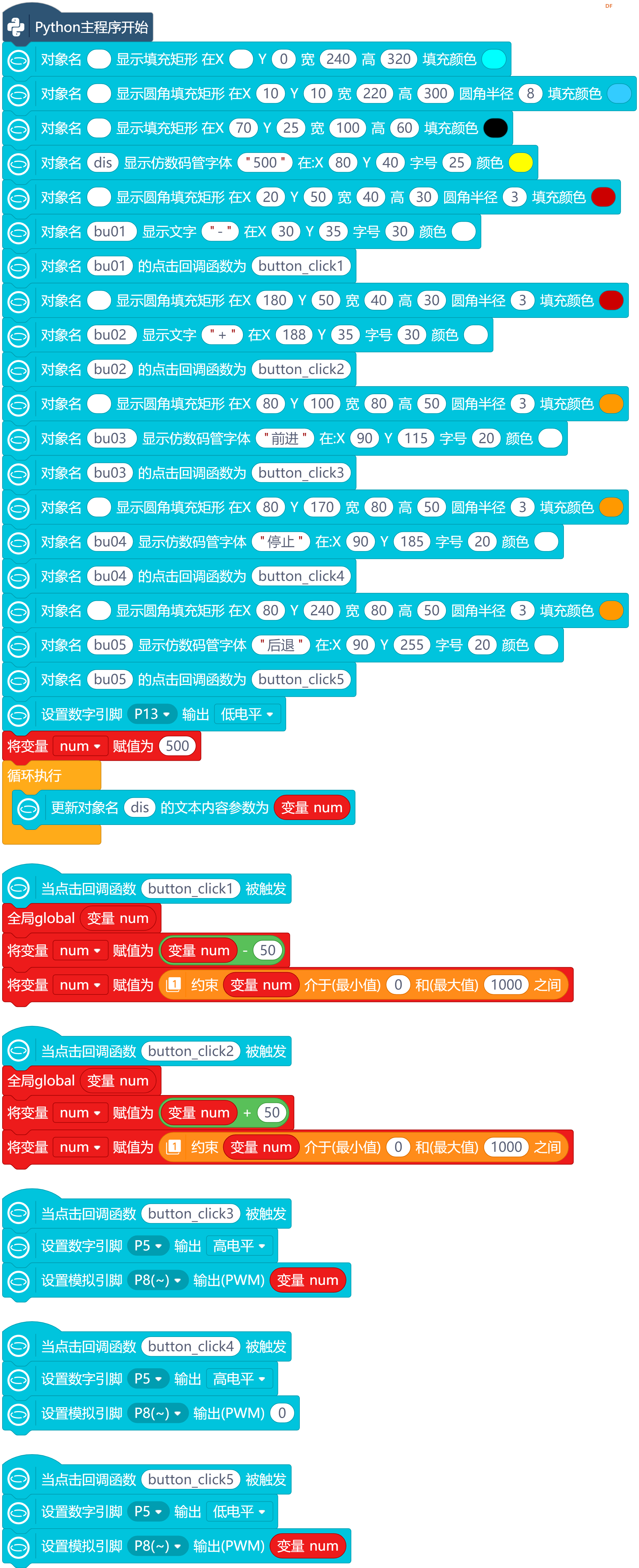 【结构搭建】 先搭建一个六足行走机器人,然后将行空板和扩展板组合体固定在机器人上即可,以下搭建图片供参考。 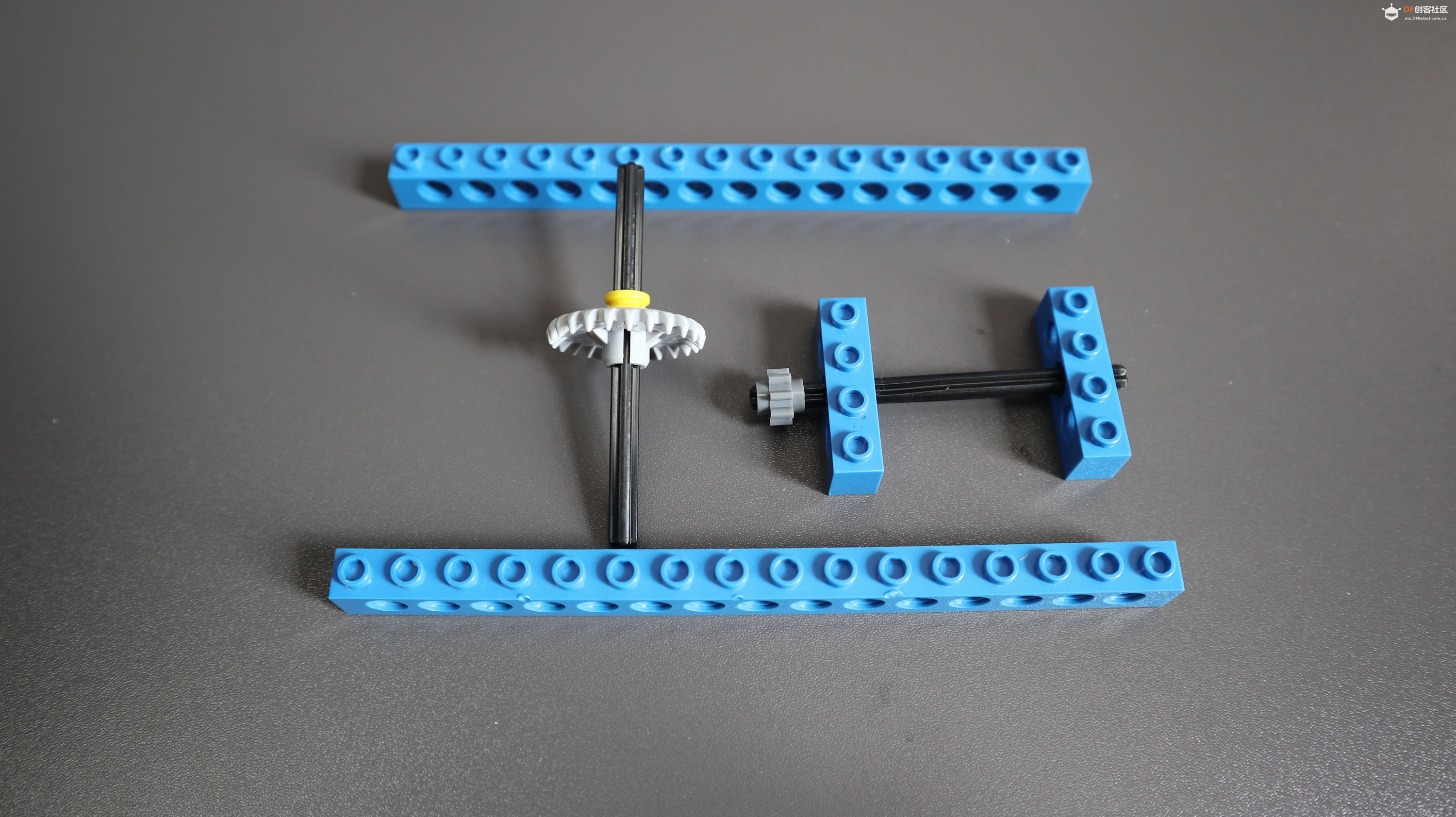 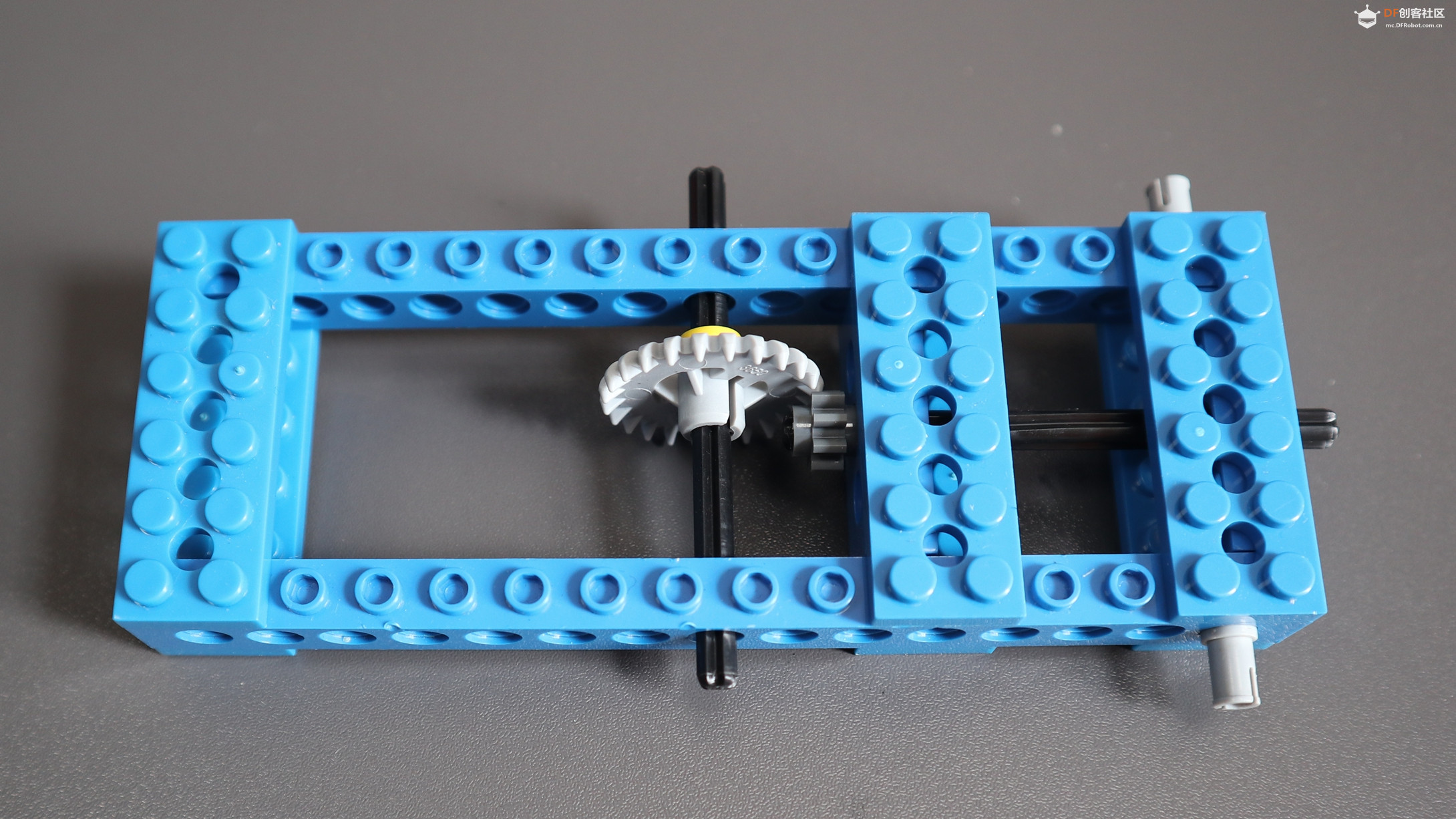 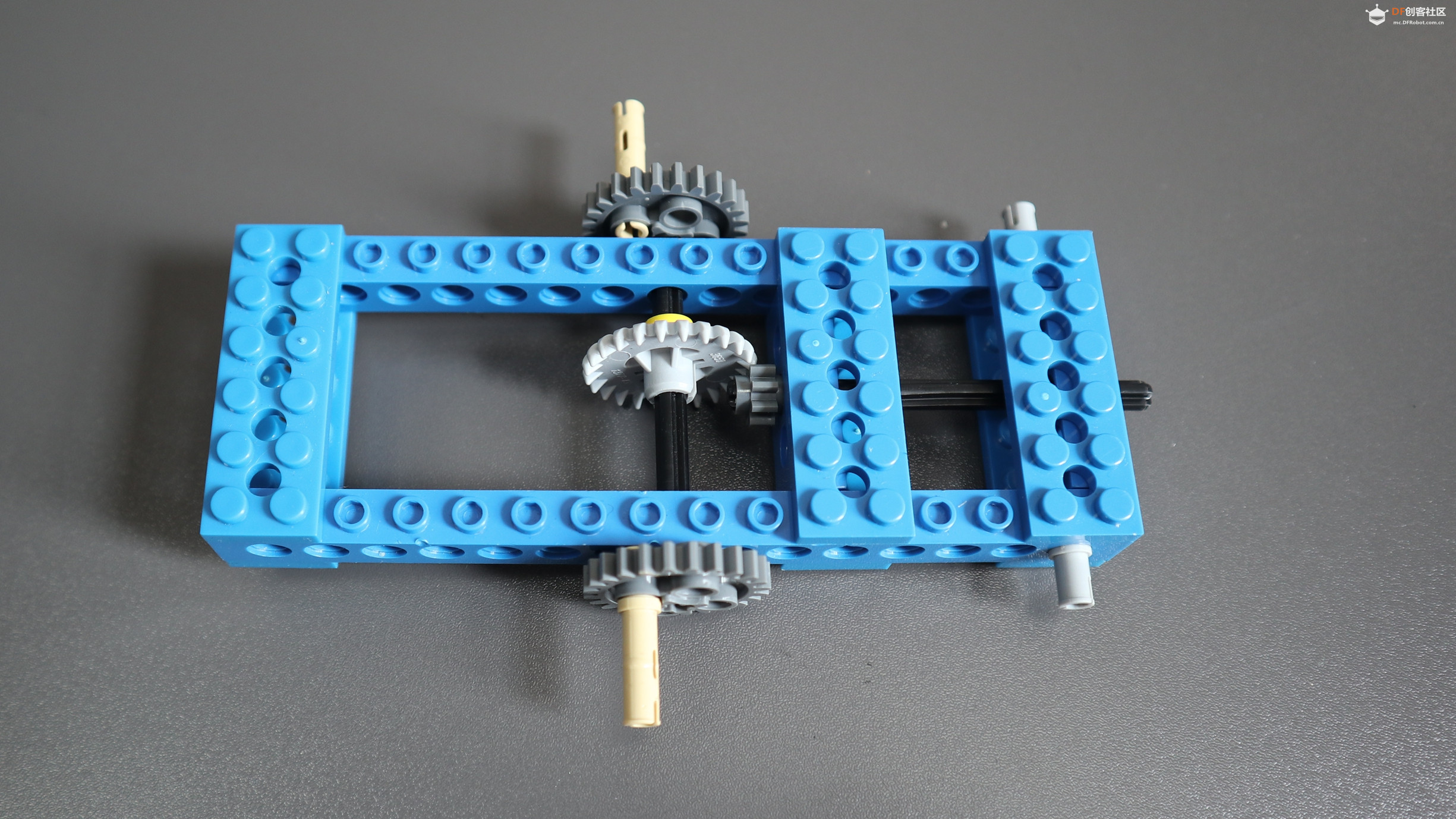 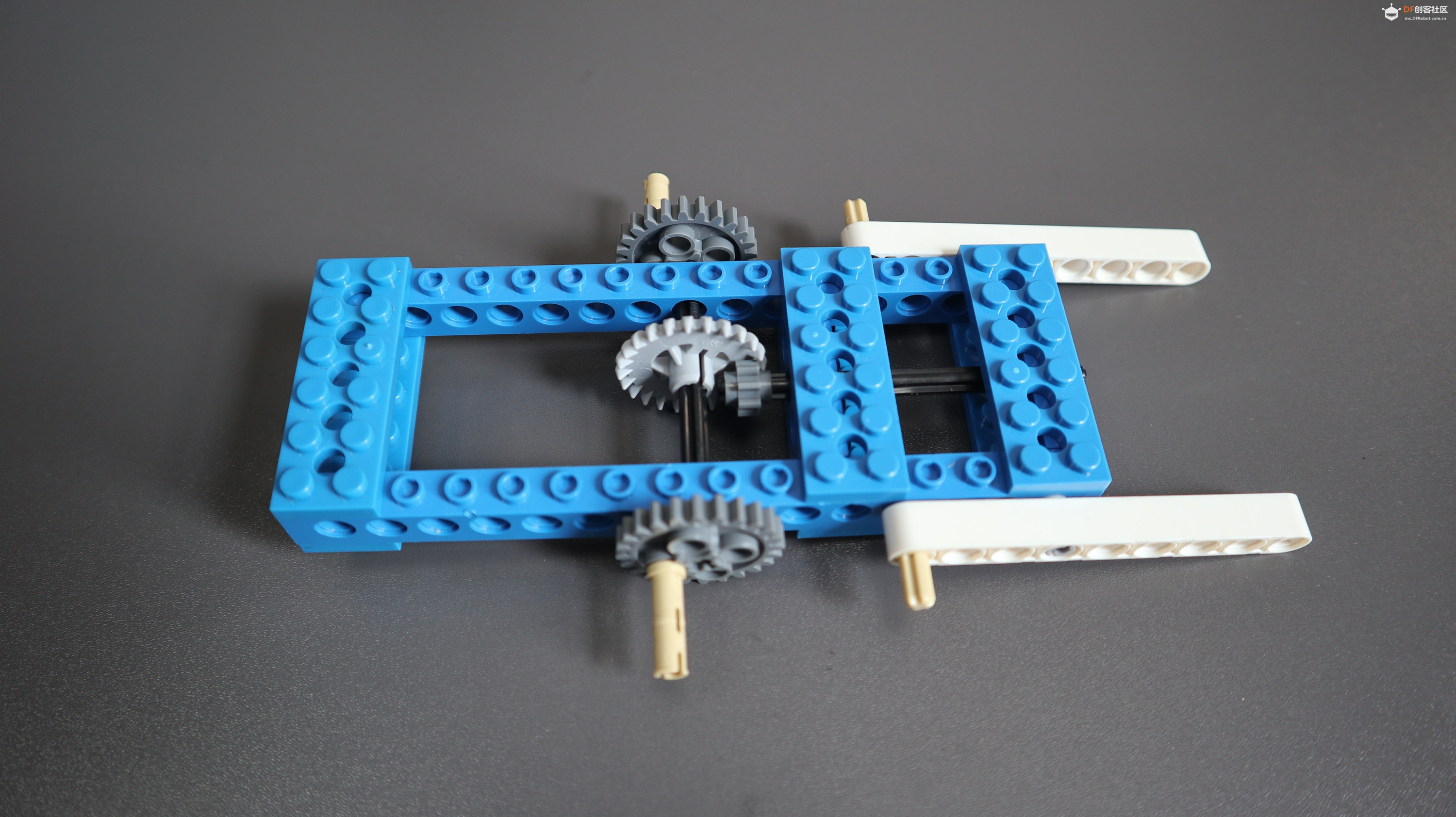 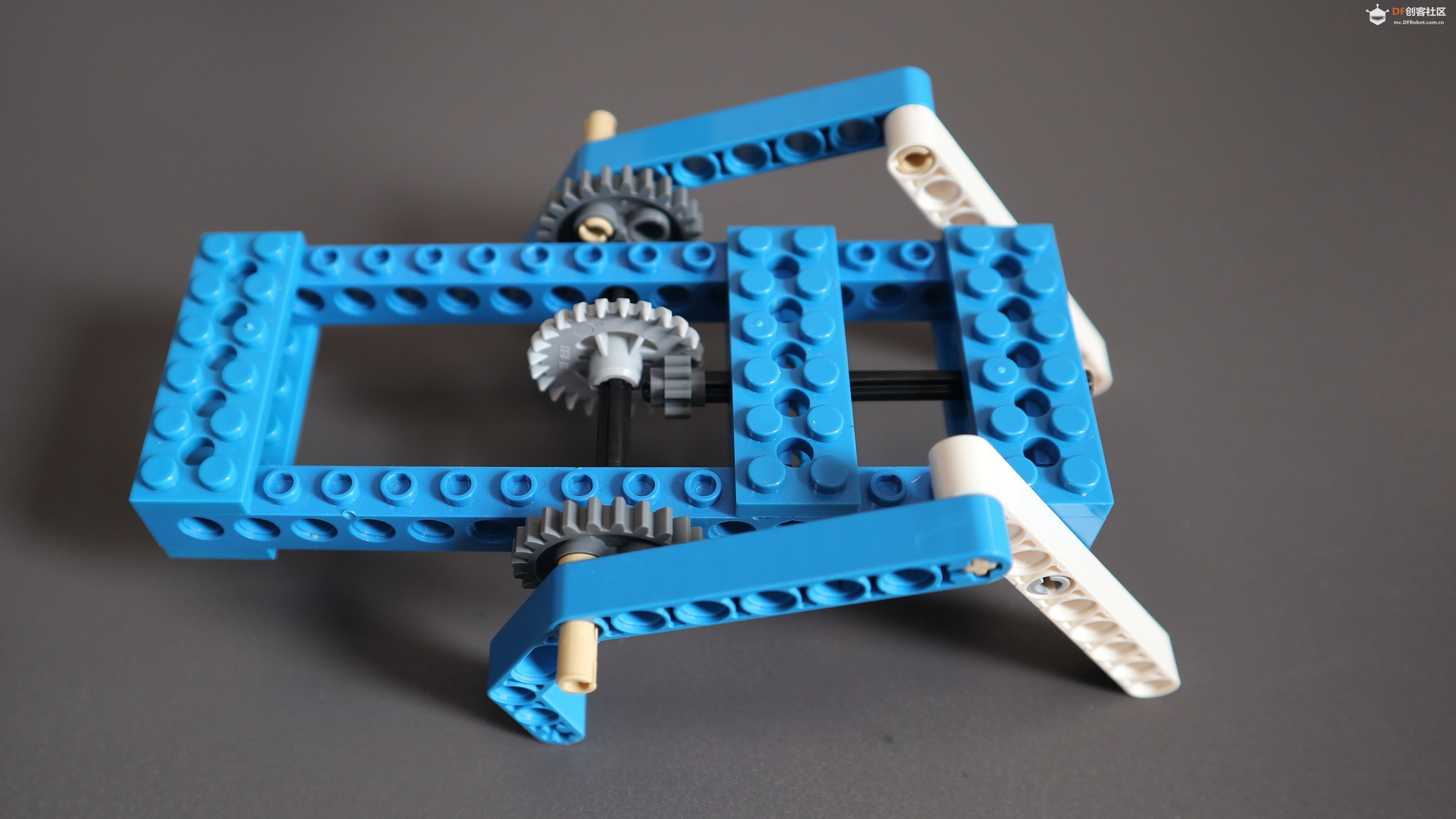 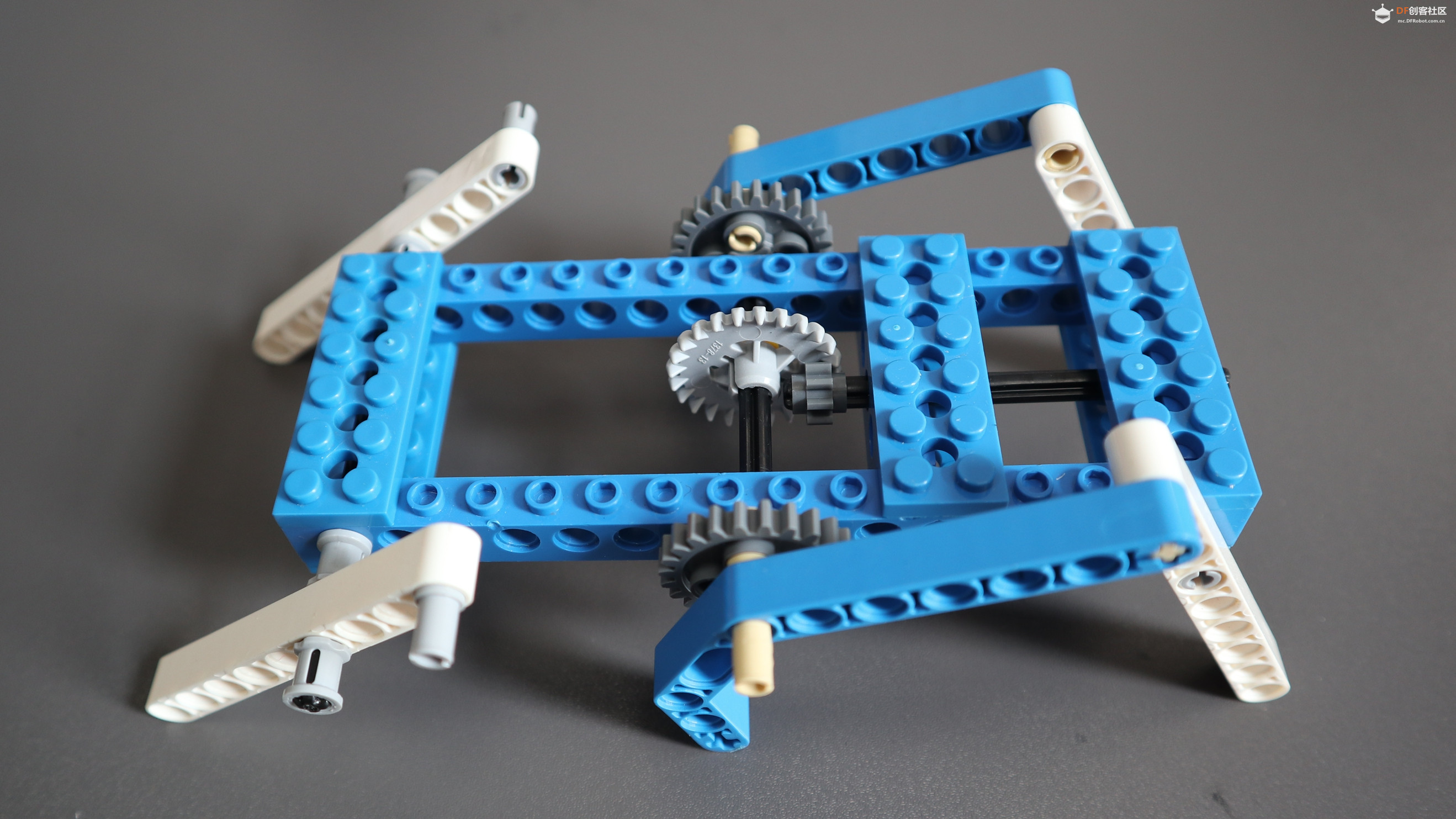 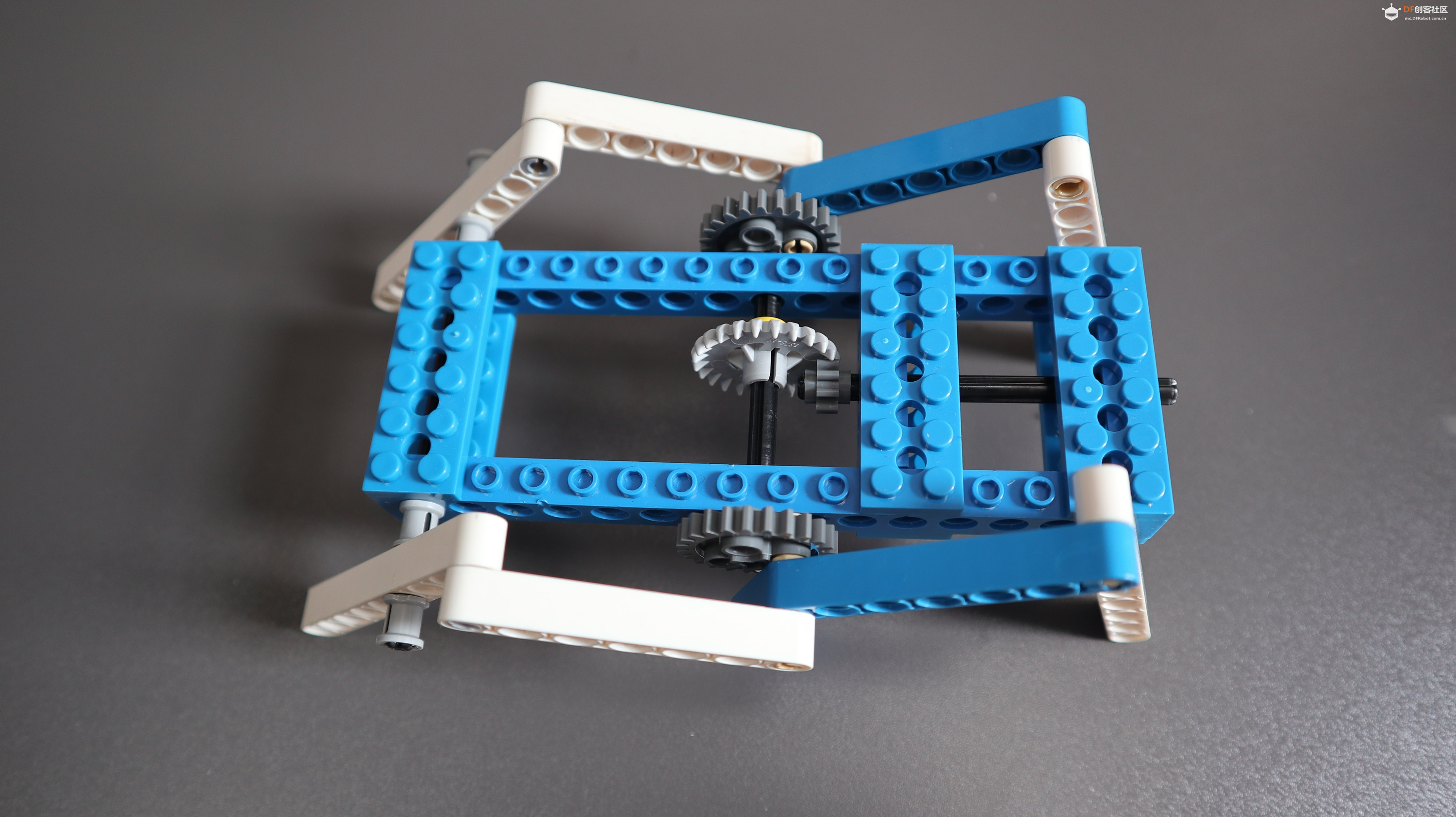 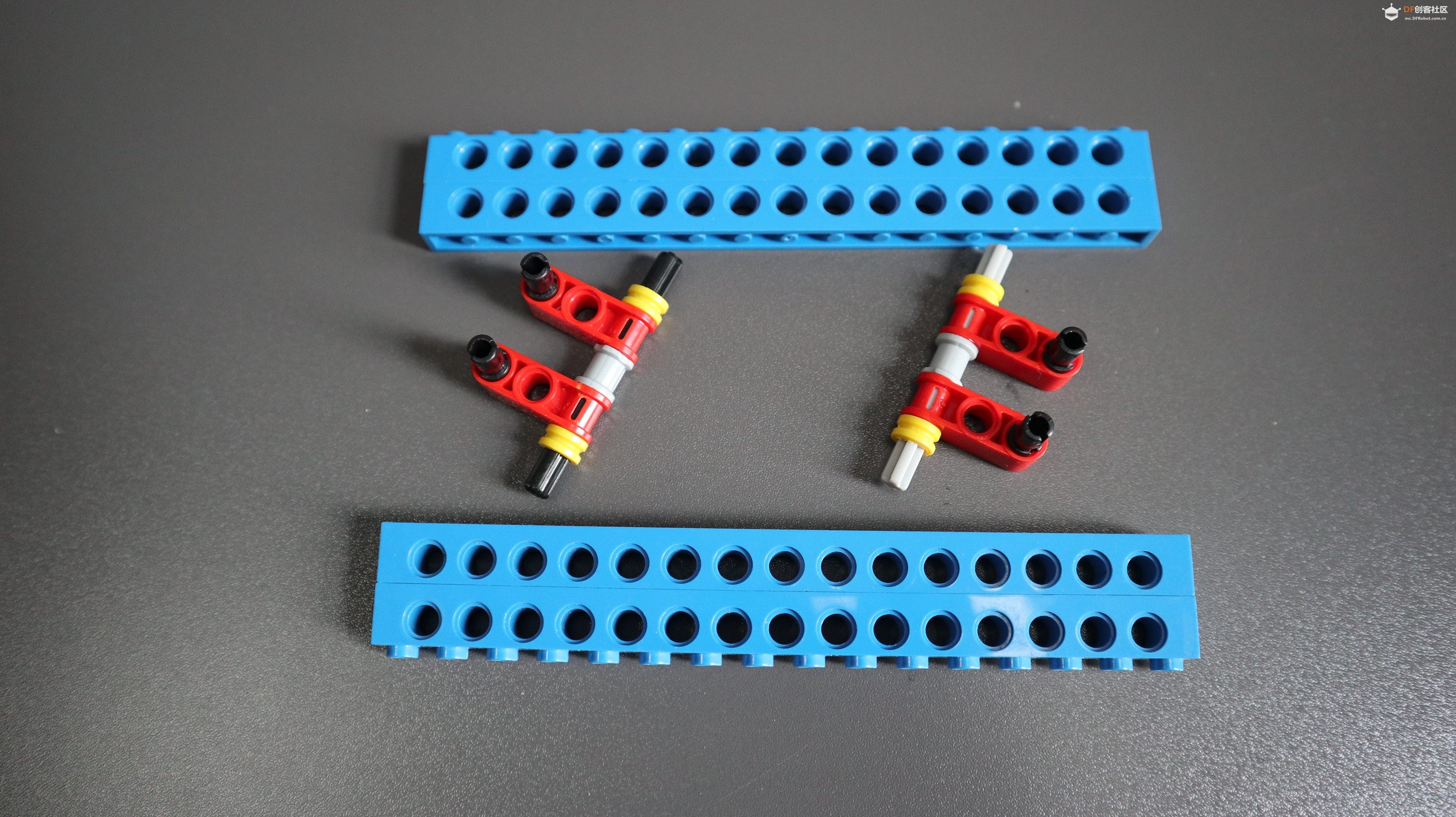 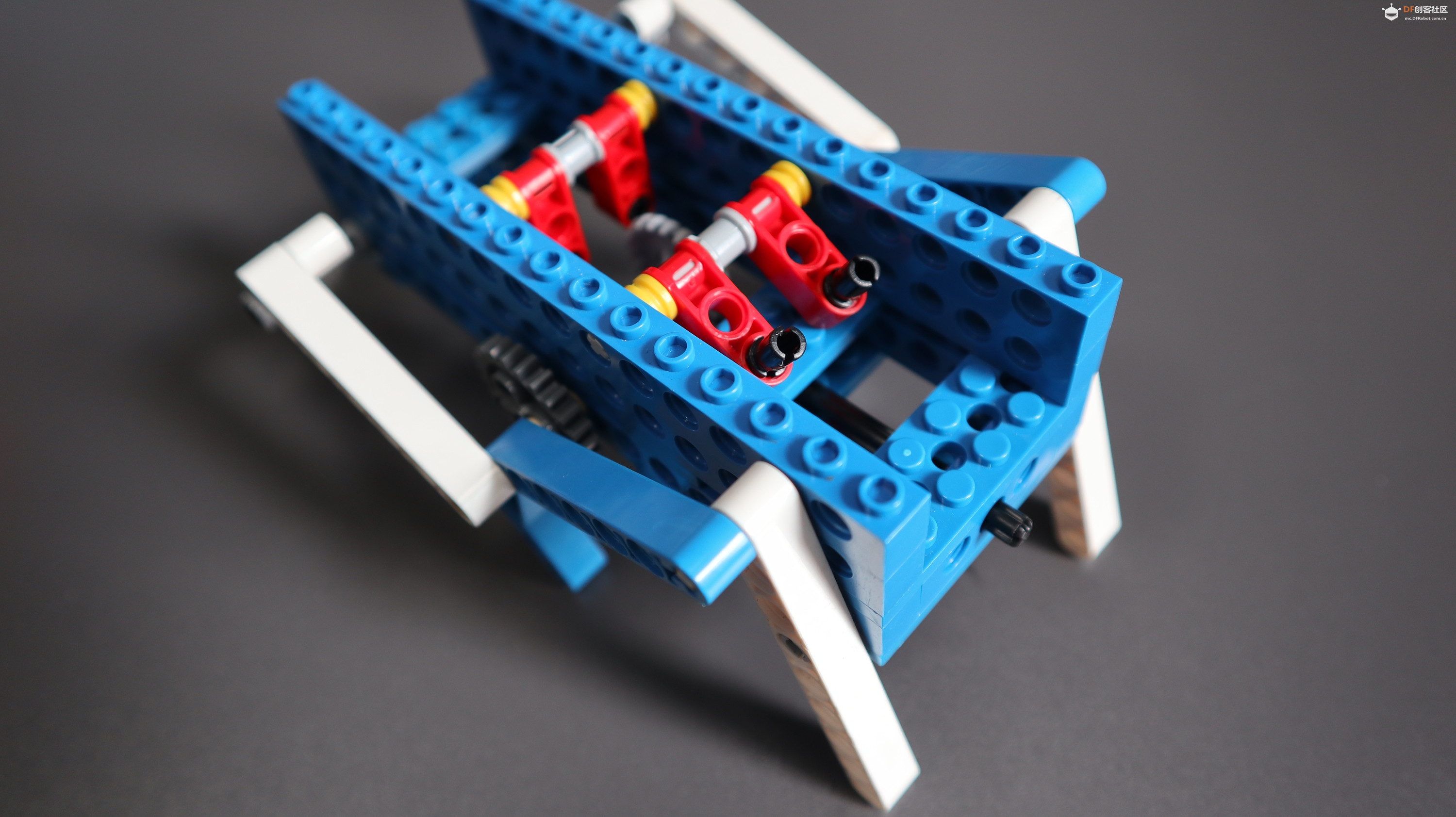 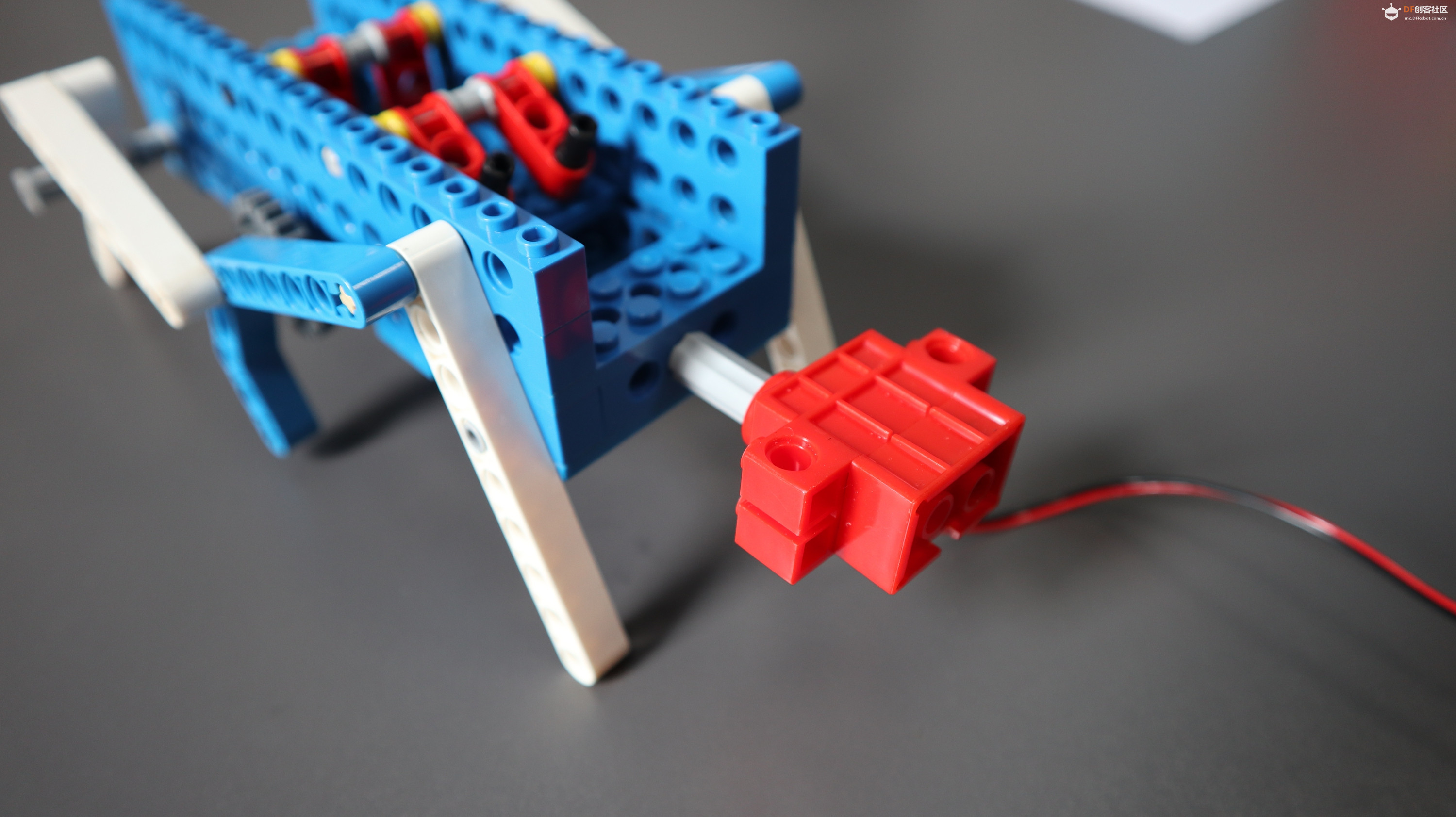 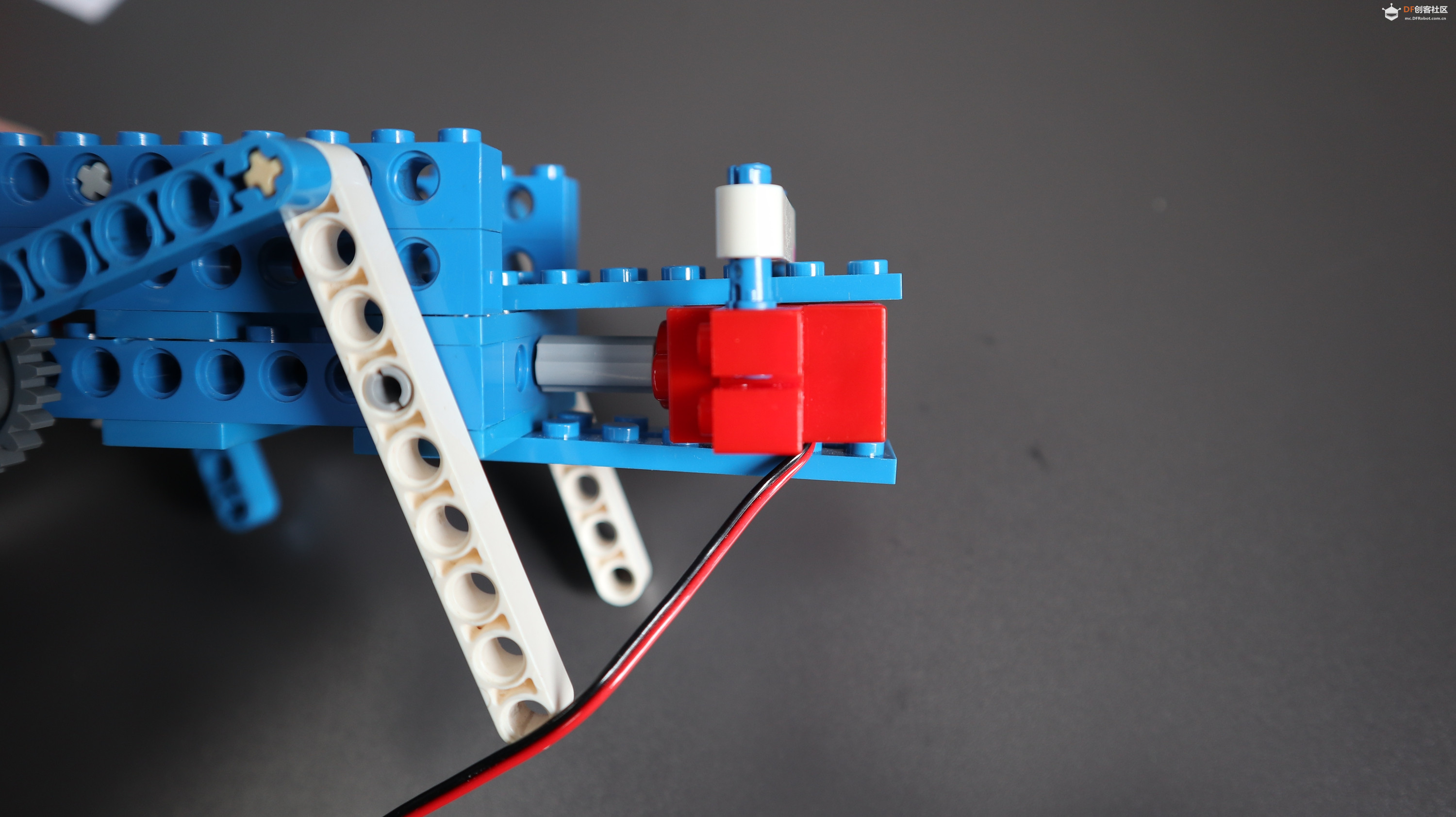 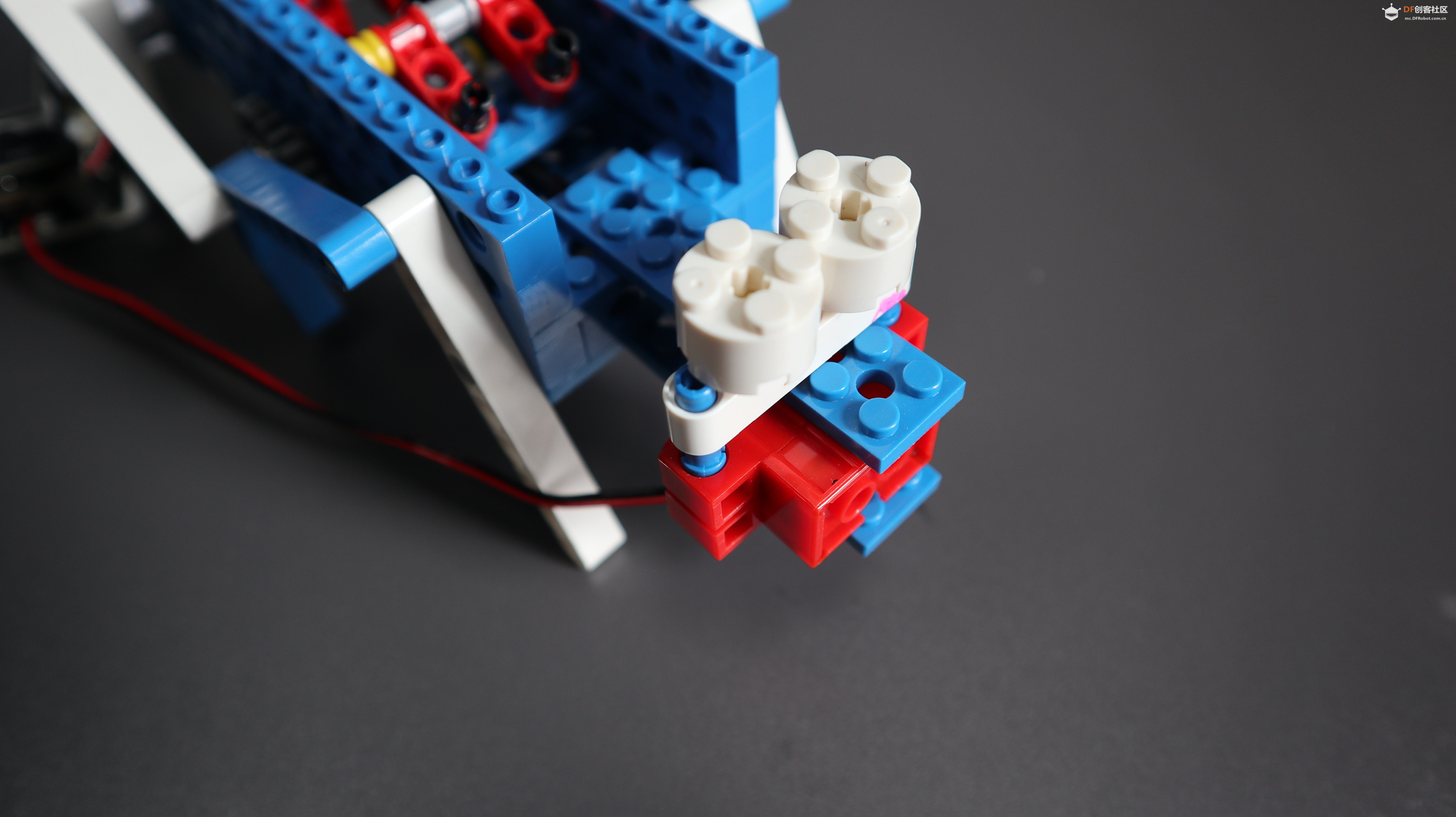 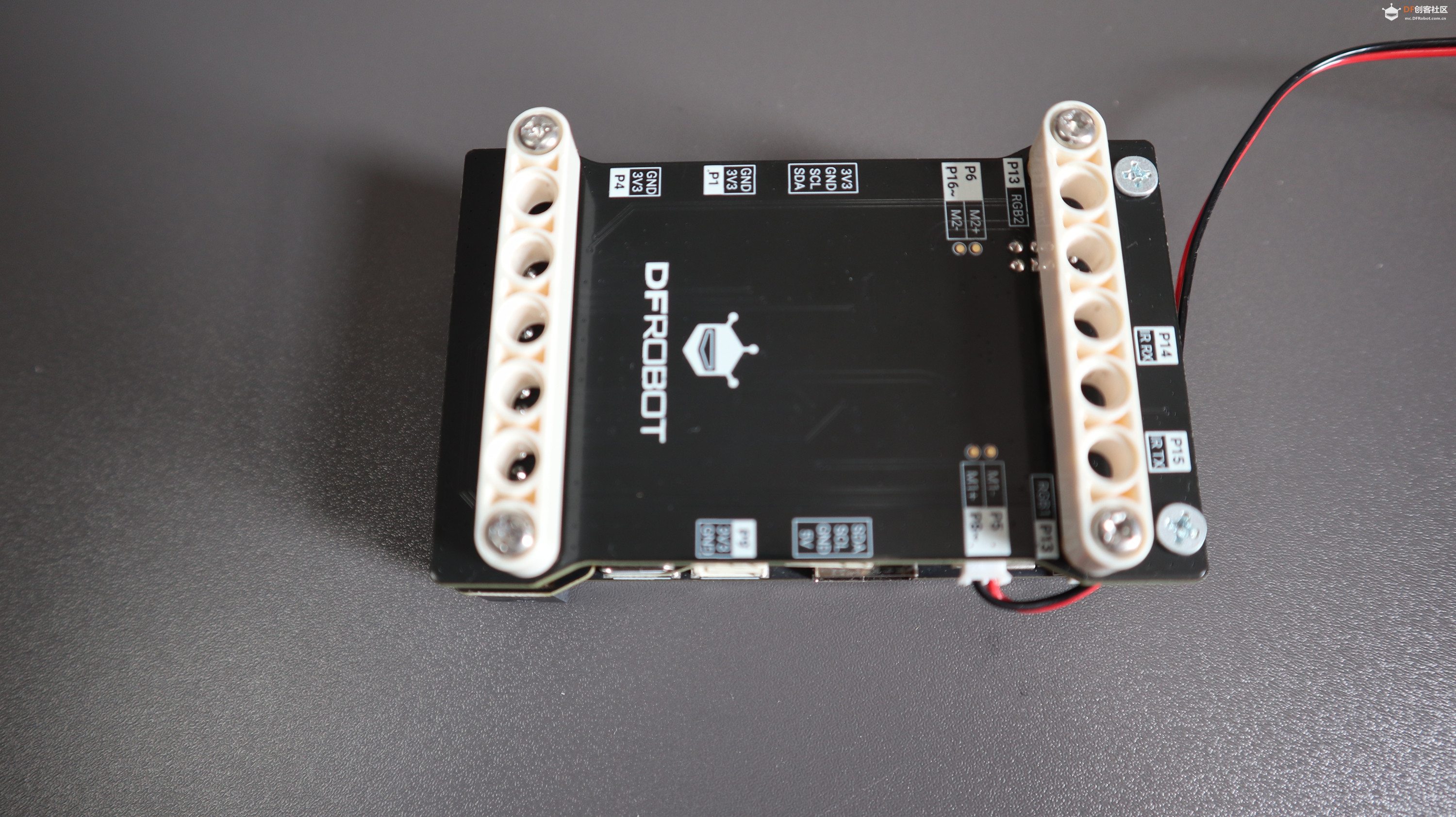  行空板及扩展板组合作为积木机器人的主控器,扩展性很强,还支持红外遥控、物联网互联、AI交互等多种控制方式,充满了无限可能。一起玩起来吧! |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







