|
21972| 1
|
[M10教程] 基于行空板的opencv feature_homography目标追踪 |

|
一、实践目标 本项目在行空板上外接USB摄像头,通过摄像头来检测目标,并进行跟踪。 二、知识目标 1、学习使用opencv库的feature homography方法来检测目标物并进行跟踪的方法。 三、实践准备 硬件清单: 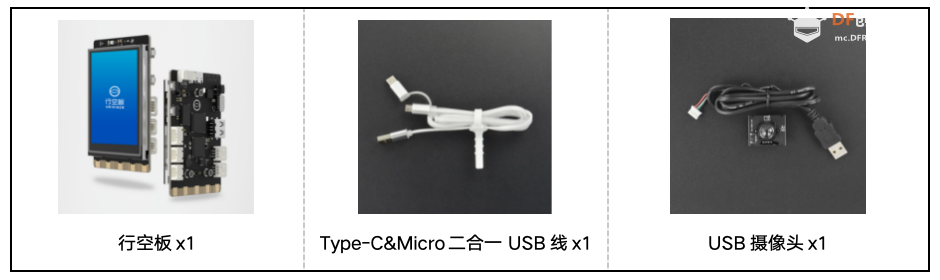 软件使用:Mind+编程软件x1 1、硬件搭建 1、将摄像头接入行空板的USB接口。  2、通过USB连接线将行空板连接到计算机。  2、软件编写 第一步:打开Mind+,远程连接行空板  第二步:在“行空板的文件”中新建一个名为AI的文件夹,在其中再新建一个名为“基于行空板的opencv feature_homography目标追踪”的文件夹,导入本节课的依赖文件。 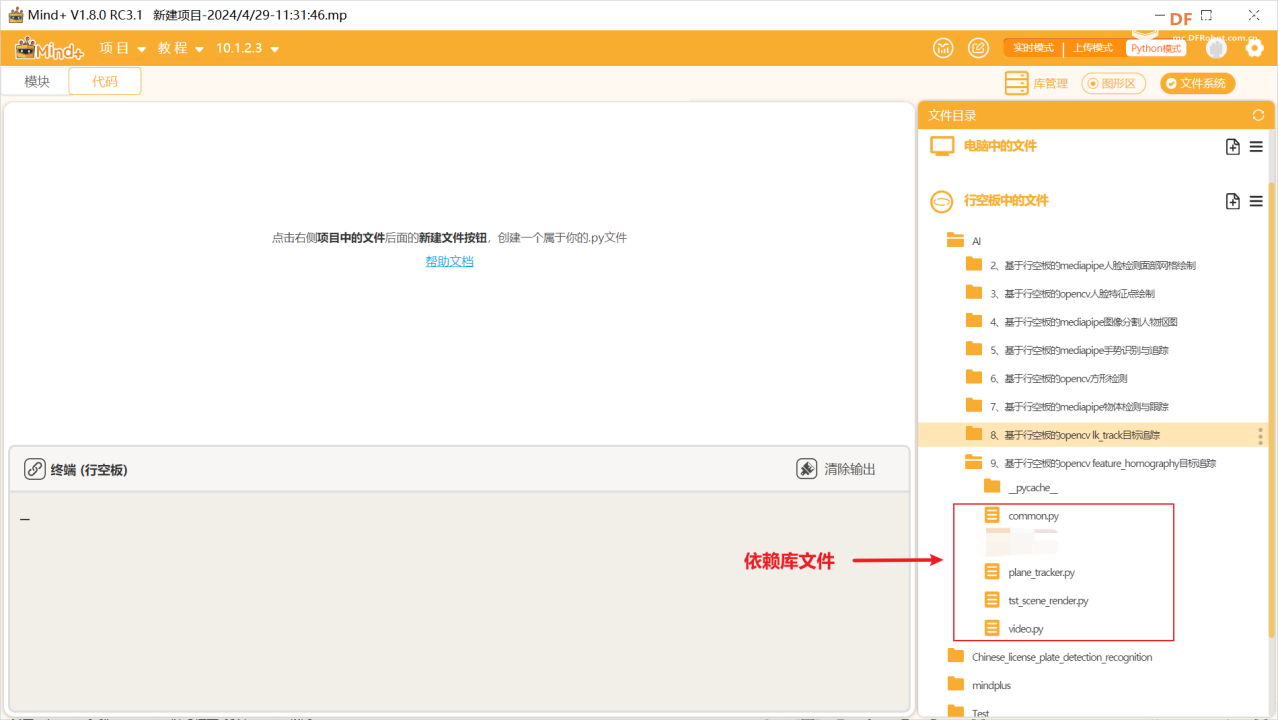 第三步:编写程序 在上述文件的同级目录下新建一个项目文件,并命名为“main.py”。 示例程序:
3. 运行调试 第一步:运行主程序 运行“main.py”程序,可以看到初始时屏幕分为了上下两个区域,上方显示着摄像头拍摄到的实时画面,下方初始时显示黑色背景,之后将摄像头画面对准一个物体(这里为小车),用鼠标将画面中的物体(小车)框出,可以看到框出的小车作为被标记物显示在了下方,轻轻移动小车,可以看到上方的画面中小车始终被框出,并且与下方之间通过光流保持着连接,达到了追踪的目的。 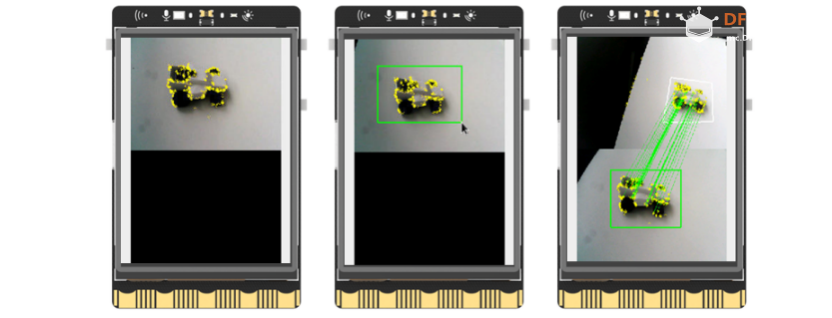 在上述的“main.py”文件中,我们主要通过opencv库来调用摄像头,获取实时视频流,然后借助计算机视觉中的ORB特征和FLANN匹配器来实现对视频中特定平面的跟踪。用户可以通过鼠标在视频中选择一个区域,然后程序会在之后的视频帧中跟踪这个区域的位置和姿态。整体流程如下, ①初始化视频源和跟踪器:程序首先打开视频源,并创建一个PlaneTracker对象用于跟踪。 ②用户选择跟踪区域:用户通过鼠标在视频中选择一个区域,选择的区域将被添加到PlaneTracker中作为跟踪目标。 ③跟踪处理:程序会逐帧读取视频,并将每一帧传递给PlaneTracker进行处理。PlaneTracker会使用ORB特征和FLANN匹配器找到当前帧中与目标相匹配的特征,并计算出目标在当前帧中的位置和姿态。 ④显示结果:程序会将跟踪的结果(包括目标的位置和姿态)实时地显示在视频上。如果跟踪成功,目标区域会被高亮显示。 ⑤用户交互:用户可以通过按下空格键来暂停或继续视频的播放。如果用户在视频暂停时选择了新的区域,这个区域将会替换原来的跟踪目标。 五、知识园地 1. 了解ORB特征(Oriented FAST and Rotated BRIEF) ORB特征,全称为Oriented FAST and Rotated BRIEF,是一种高效的特征检测和描述算法,由Ethan Rublee等人在2011年的论文"ORB: An efficient alternative to SIFT or SURF"中提出。 ORB特征算法主要包含两个部分:特征点检测和特征描述。 1、特征点检测:ORB使用了FAST角点检测器进行特征点的检测。FAST角点检测器是一种高效的角点检测算法,可以快速地在图像中找到角点。然而,FAST角点检测器检测到的角点没有方向信息,为了解决这个问题,ORB算法引入了角点的方向信息,从而得到了带有方向信息的特征点。 2、特征描述:ORB使用了rBRIEF描述子进行特征描述。BRIEF是一种二进制的特征描述符,它通过比较图像中一个小区域内的像素对的亮度,生成一串二进制串作为该区域的描述子。然而,BRIEF描述子不具有旋转不变性,即当图像旋转时,BRIEF描述子会发生变化。ORB通过在BRIEF的基础上引入了旋转不变性,得到了rBRIEF描述子。 ORB特征算法的主要优点是计算速度快,内存占用少,适合于实时应用和嵌入式设备。它的性能与SIFT和SURF等算法相当,但计算速度更快,内存占用更少。 FLANN(Fast Library for Approximate Nearest Neighbors)是一个用于进行大规模数据集中的快速近邻搜索的库。在很多计算机视觉和机器学习的任务中,我们经常需要在高维空间中找到某个点的最近邻点,这是一个在计算上非常昂贵的任务。FLANN库提供了一种快速和高效的方法来进行这个操作。 FLANN支持多种类型的数据和距离度量,包括欧几里得距离、曼哈顿距离、汉明距离等,并且可以自动选择最适合你数据的算法。它提供了一种称为索引的数据结构,可以将数据预处理成特定的格式,以便在搜索时更快地找到最近邻。 在计算机视觉中,FLANN常常被用来进行特征匹配。比如说,我们在两张图片中分别提取出了一些特征点,然后需要找出在两张图片中对应的特征点。这时候,我们就可以使用FLANN来快速找到每个特征点的最近邻,从而实现特征匹配。 在OpenCV中,FLANN匹配器可以通过cv2.FlannBasedMatcher类来使用。这个类提供了knnMatch和radiusMatch等方法,可以进行k-近邻匹配和半径匹配。 光流(Optical Flow)是计算机视觉中的一种重要技术,它主要用于从视频序列中估计物体的运动。光流描述的是图像序列中的像素在时间维度上的运动变化,即每个像素点随时间在图像平面上的移动轨迹。 光流的基本假设是图像的亮度在短时间内是恒定不变的,即一个像素点在当前帧和下一帧中的亮度是相同的。另外,光流还假设相邻像素具有相似的运动,即物体的运动是连续的。 光流法通常用于估计视频中物体的速度或者运动方向。例如,在自动驾驶、视频监控、运动检测等领域,光流法都有广泛的应用。 在计算方法上,光流法主要有两类:稀疏光流法和稠密光流法。稀疏光流法只在一些特定的点(例如特征点)上计算光流,而稠密光流法则在每个像素点上都计算光流。 在OpenCV中,有函数cv2.calcOpticalFlowPyrLK和cv2.calcOpticalFlowFarneback等可以用于计算光流。其中,cv2.calcOpticalFlowPyrLK是一种基于Lucas-Kanade方法的稀疏光流法,而cv2.calcOpticalFlowFarneback则是一种稠密光流法。 |

10.51 KB, 下载次数: 2522
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






