|
4196| 0
|
行空板扩展板:语音控制小车 |
|
本帖最后由 地下铁 于 2024-8-11 17:15 编辑 【项目背景】 DF推出了行空板(UNIHIKER)开发适配的扩展板,很幸运得到了测试的机会。开箱后映入眼帘的莫过于独特的45度角仰望星空的插槽设计,另外丰富的供电方式的创新也能体会到DF的工程师用心满满的贴心设计。围绕电机驱动这个功能,结合语音识别模块,做一个通过语音识别指令来控制运动的小车。  【硬件清单】 1. 行空板双路电机驱动I/O扩展板*1 2. 电机*2 3. 2节3.7V电池 + DC转接头 4. 语音识别模块 5. Micro USB数据线*1 6. 万向轮*1 【准备工作】 1、阅读文档 首先要阅读是产品维库:行空板双路电机驱动IO扩展板 DC Motor Driver Carrier ,里面包含了非常丰富的上手指引。里面特别贴心的给出了6个案例,反正我是基本都过了一遍。 2、搭建测试 要让小车动起来,当然要准备好合适的供电电池。因为扩展板已经提供了DC接口,其实使用6个1.5V的带DC头的电池盒是挺合适的。但是这次扩展板还配了一个带转接柱的DC2.1转接头,用两个金属跳线,刚好就可以把其他小车的7.4V的锂电池盒用上,它可反复充电比较经济环保。 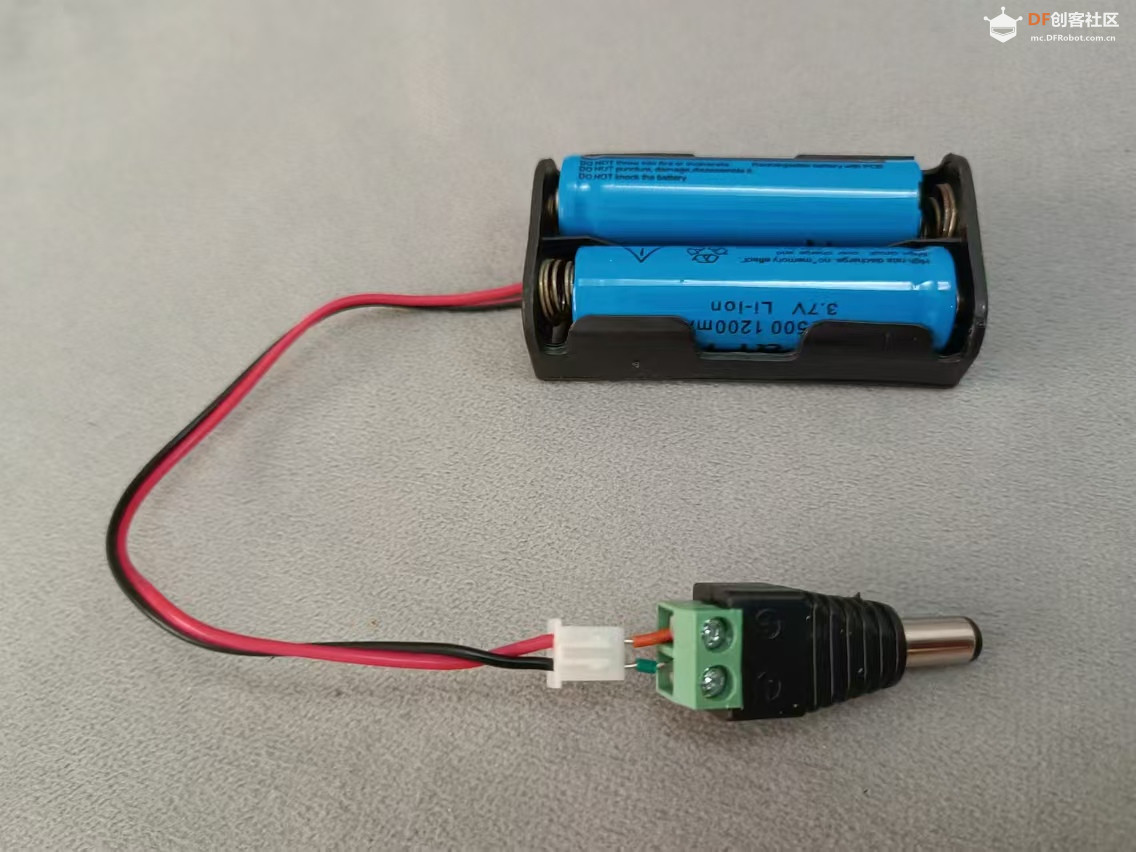 电路连接比较简单,把电机引线连接到扩展板两侧的接线柱上。扩展板的标识也是很清晰的,数字引脚P5,P6是控制电机转动方向,pwm引脚p8,p16用于调制转速,版主大大已经写了一篇很全面了(看这里),此处就不赘述了。语音识别模块接在iic上,扩展板提供了4组iic,3组是3.3v,1组是5V的,又是一个值得点赞的亮点。接线图如下图所示: 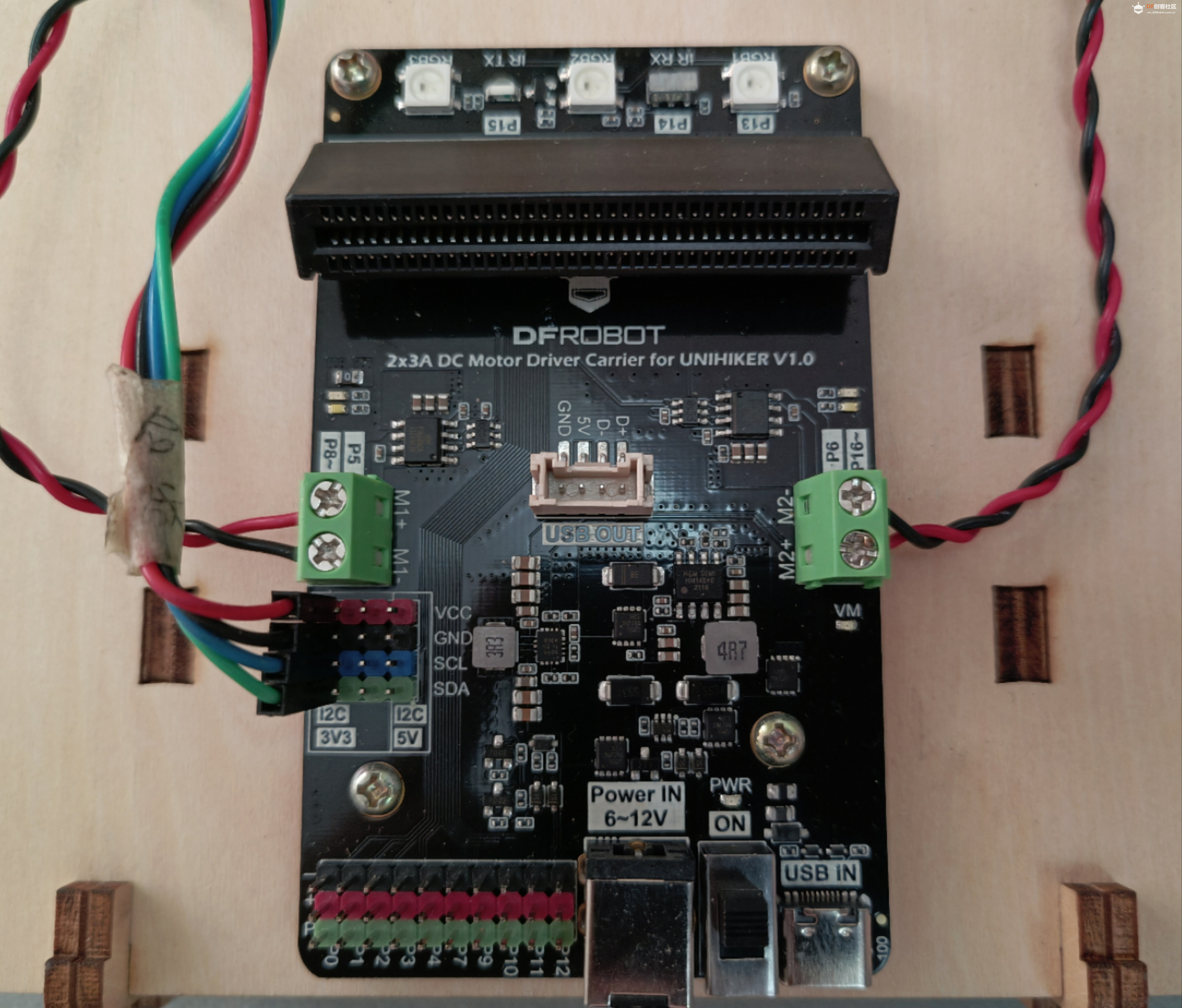 【制作车体】 其实在wiki里面已经提供了一个扩展板的尺寸图,直接按照尺寸参数进行设计就可以了。 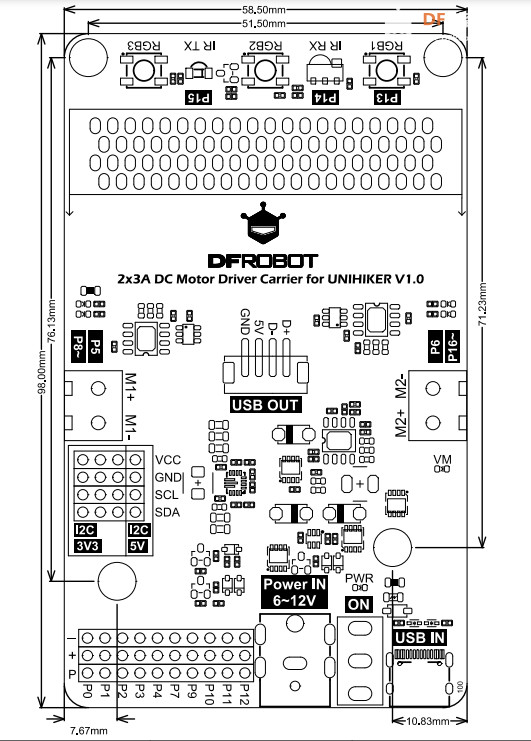 找了一个之前做的车子,还是上下两层的设计,把扩展板放在上层,电池盒放在下层,电池盒本身的重量也能起到平衡车子的作用。适当调整一下尺寸,因为我想同时兼容6个电池的DC电池盒,所以车子的宽度设置的宽一些。另外在车头留出一些卯眼,便于后期安装摄像头、超声波等模块。 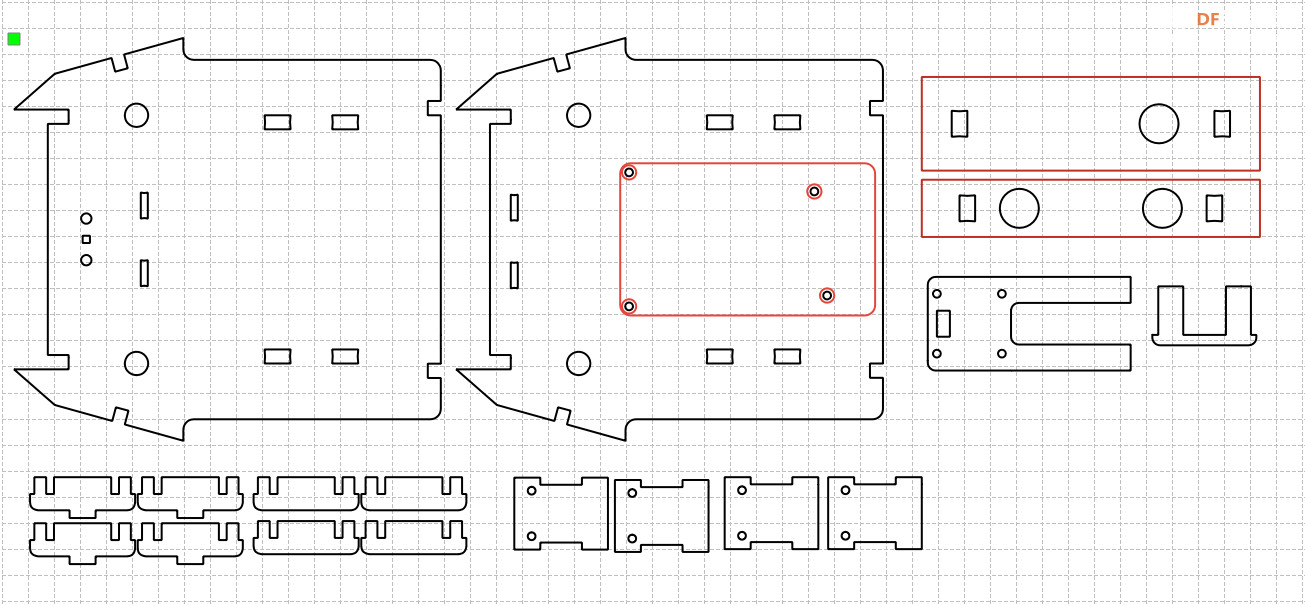 【编写程序】 程序如下图所示,为了演示视频的需要,识别到指令后执行对应运行动作时,都是执行1秒后就停止。 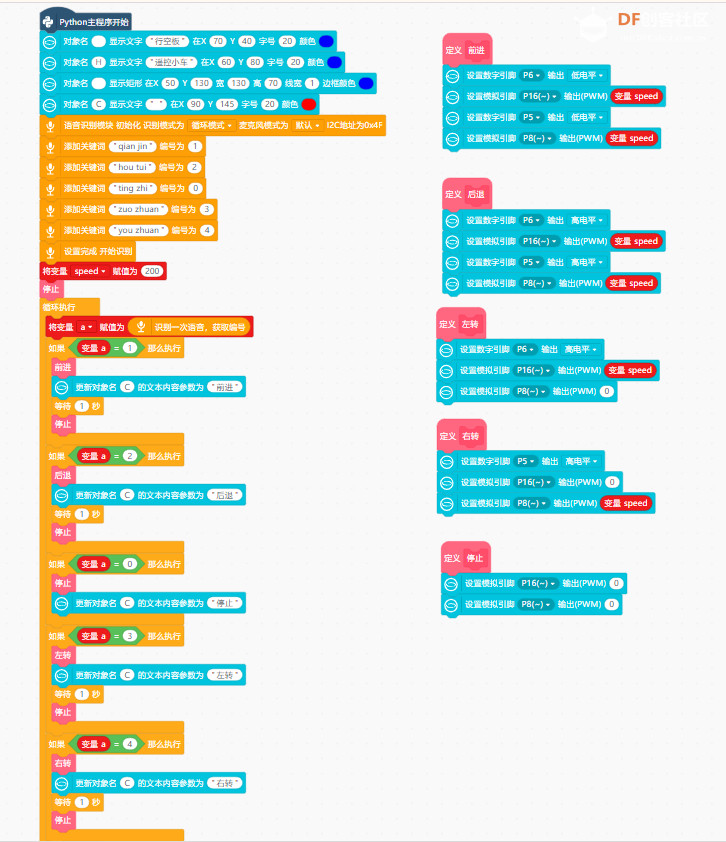 【演示视频】 下面用视频演示一下最终的作品效果。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






