|
3410| 0
|
[M10项目] 行空板扩展板 试用报告+临时作品:语音控制四驱车(... |
|
本帖最后由 张一 于 2024-10-2 15:11 编辑 暑假期间看到行空板(UNIHIKER)扩展板试用信息,很有幸参与使用环节,原本以为时间还有很多,但是随着假期结束,时间占用严重,起初收到扩展板时的想法也在三个月的时间里变得飘忽不定,但是DEADLINE总是要来的,我深知截止日期交出的东西全是shit,曾经我有大把时间完成这项令人骄傲的的工作,但是只怪自己没有珍惜,只好在今天追悔莫及,原本计划的耐用性测试和极限测试也只能停留在理论,墨菲定理在今天的赶工中表现得淋漓尽致,曾经教育别人的话像回旋镖一样戳中我的脑门,废话不多说,上才艺: 一、横向对比 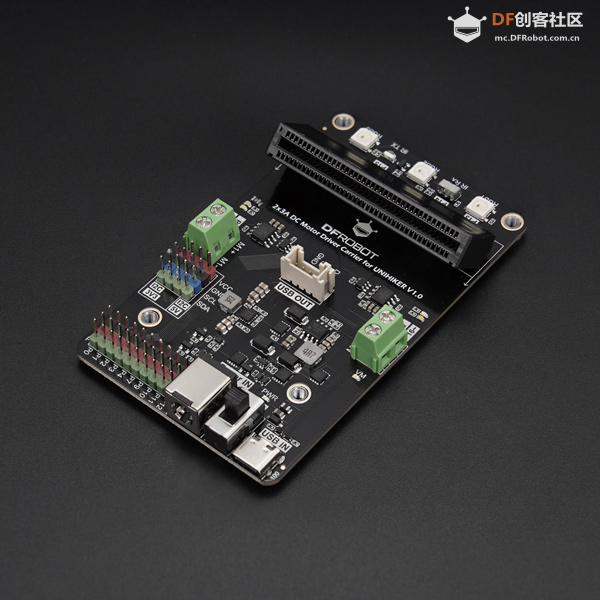 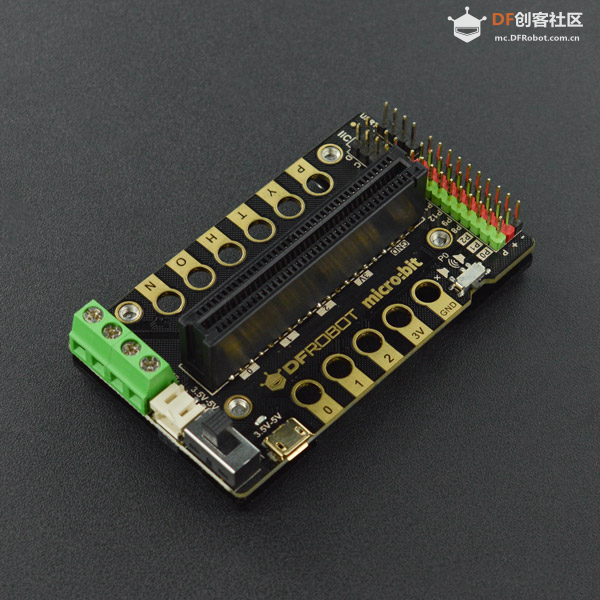 首先肯定要对比两个扩展板的差异,micro:bit掌控I/O扩展板是几年前掌控配套的,也用在新的扩展板没有到手以前的行空板上,除了底座的供电方式、电压范围、以及电机驱动芯片的差异,作为新版比较有意义的改进就是加入5VI2C的插排,以及倾斜的插座方向,可能在有的场景更有优势。 二、芯片差异 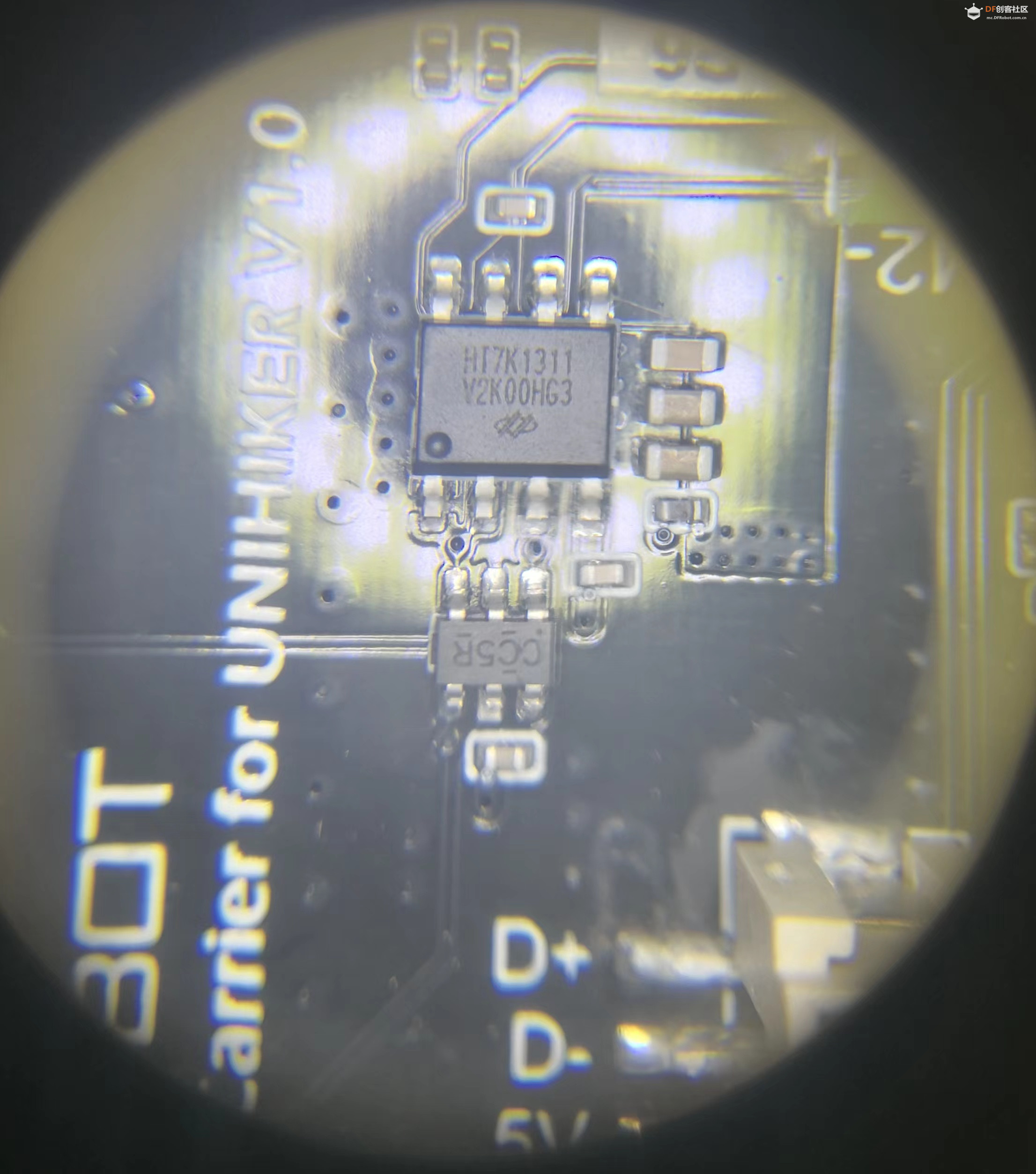 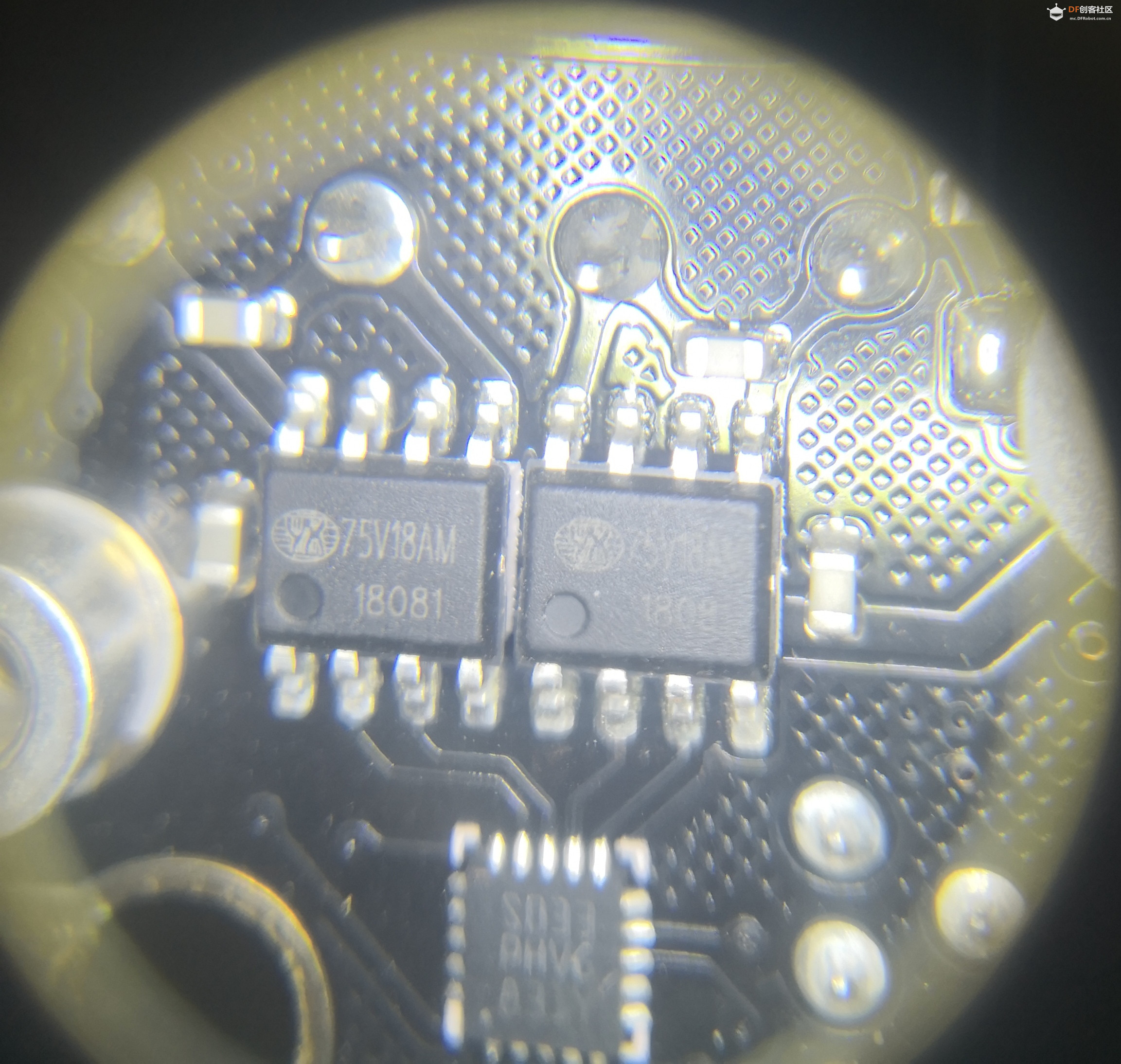 两个芯片在最大耐压和最大电流上有一定差别,但是实际使用,只能使用1系列减速电机,2系列的就有过流风险,所以1.8A和3A严格意义上区别不大。 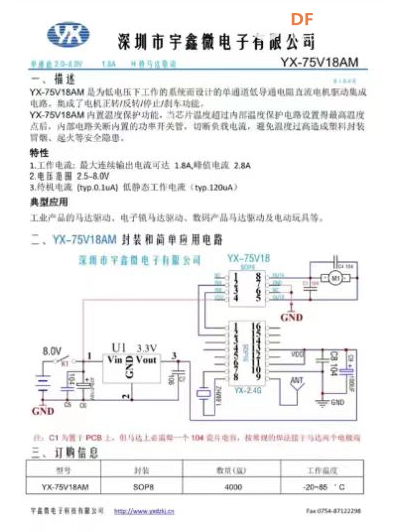 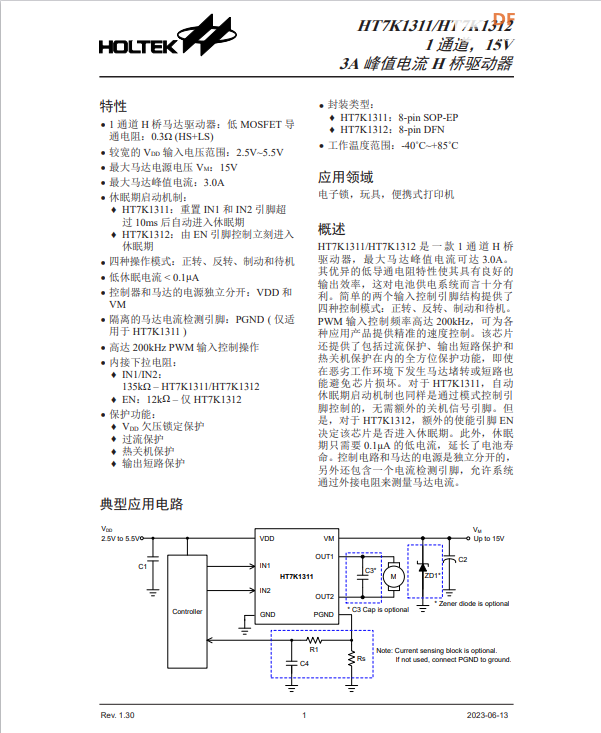 三、测试平台 手头有一个切诺基4WD移动机器人平台自身集成了通用的L298P电机驱动芯片。  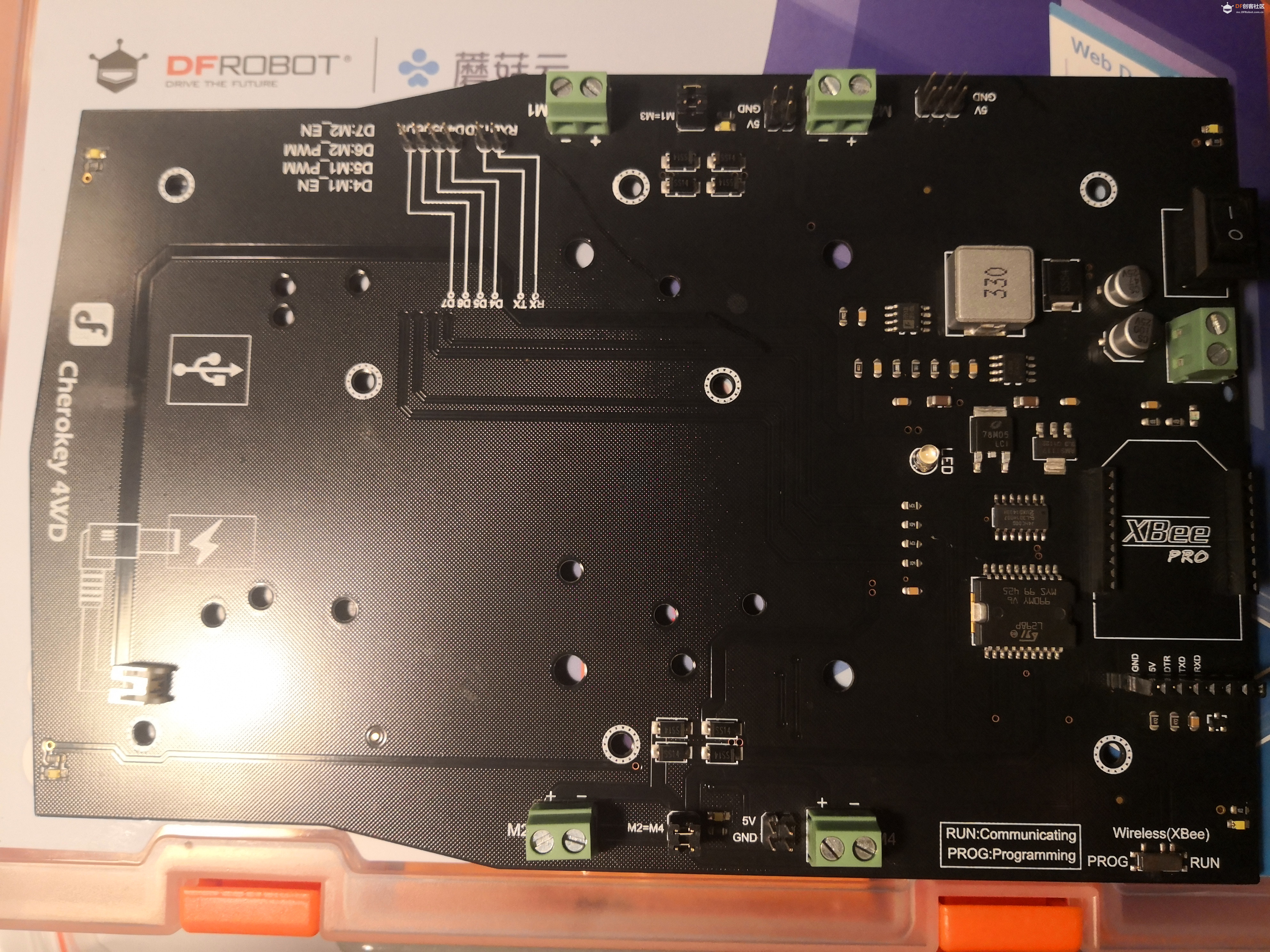 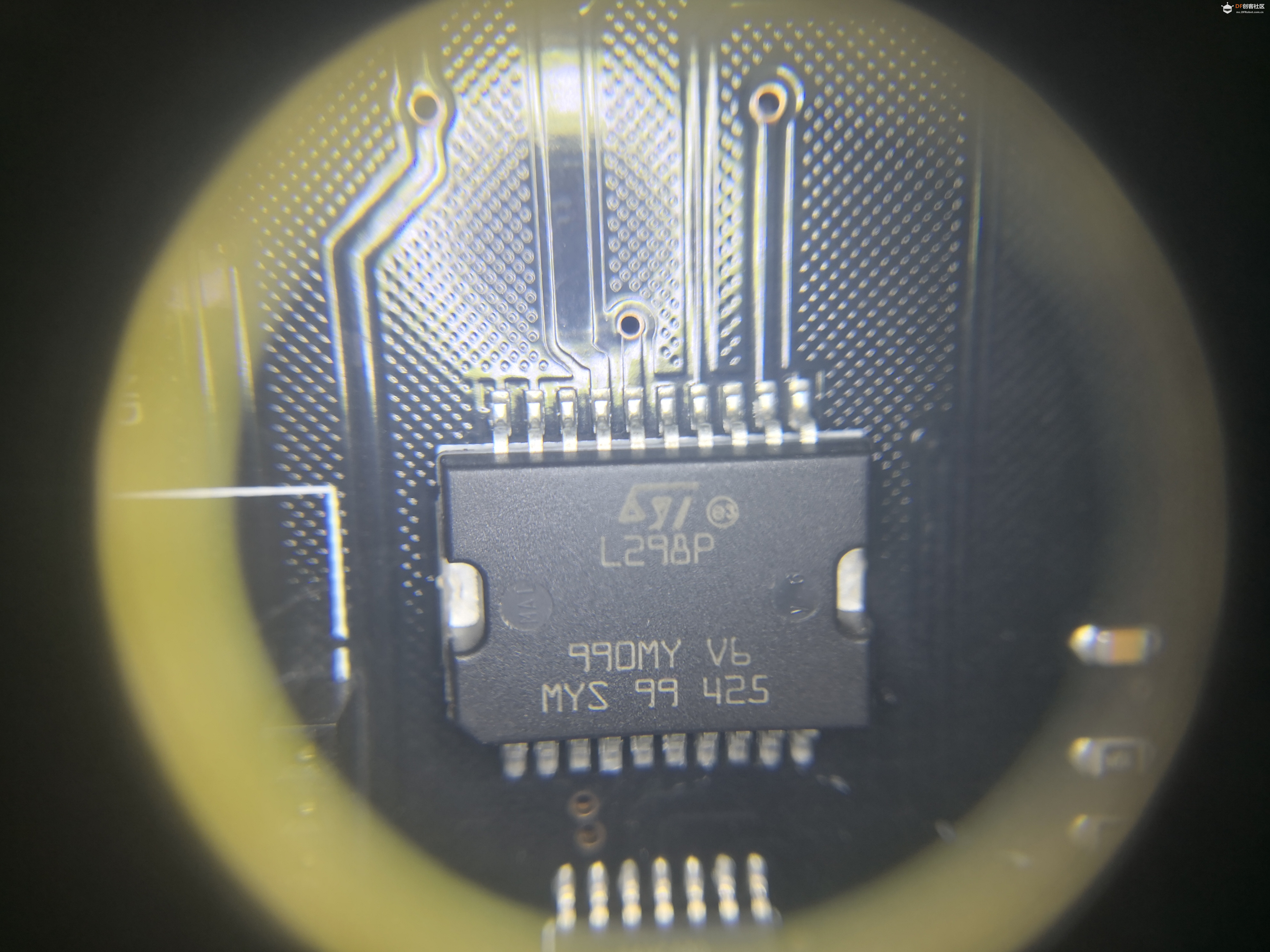 板载298耐压和最大电流都是优于新旧两个扩展板的电机驱动芯片的,但是,ST产的进口货,价格超级贵,国产芯片优势明显。 单侧两个电机由一个驱动芯片驱动,由于是130减速电机,空载电流在250MA以内,两个电机并联不到500MA,即使堵转也不到1A,芯片的冗余足够,但是再大一号的电机就有过载烧毁的风险,所以才说1.8和3没有本质区别。 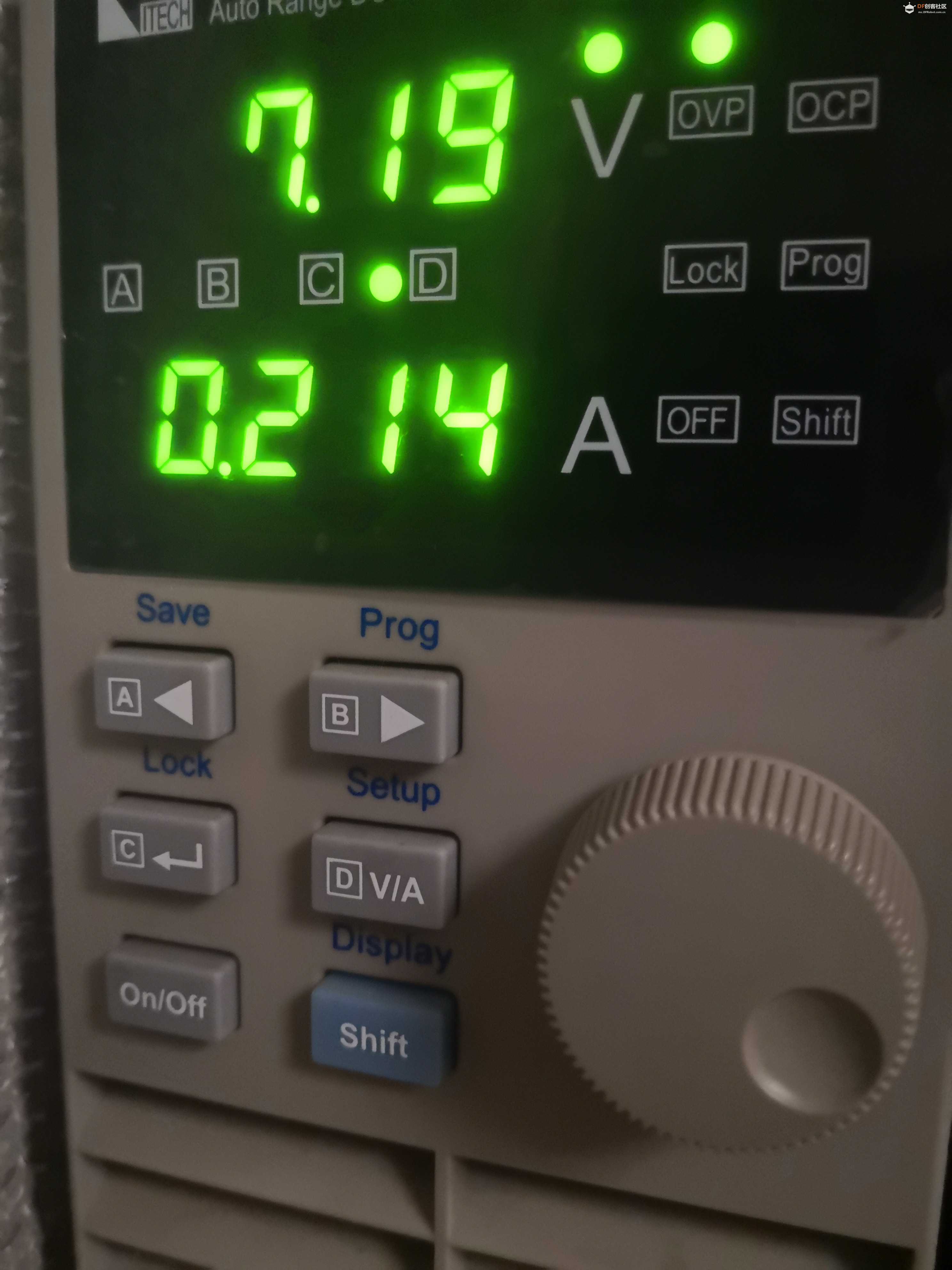 原有平台只保留底盘和电机,使用新的扩展板驱动,找不到合适空位,就随随便便自己切一个。当然参照扩展板数据。 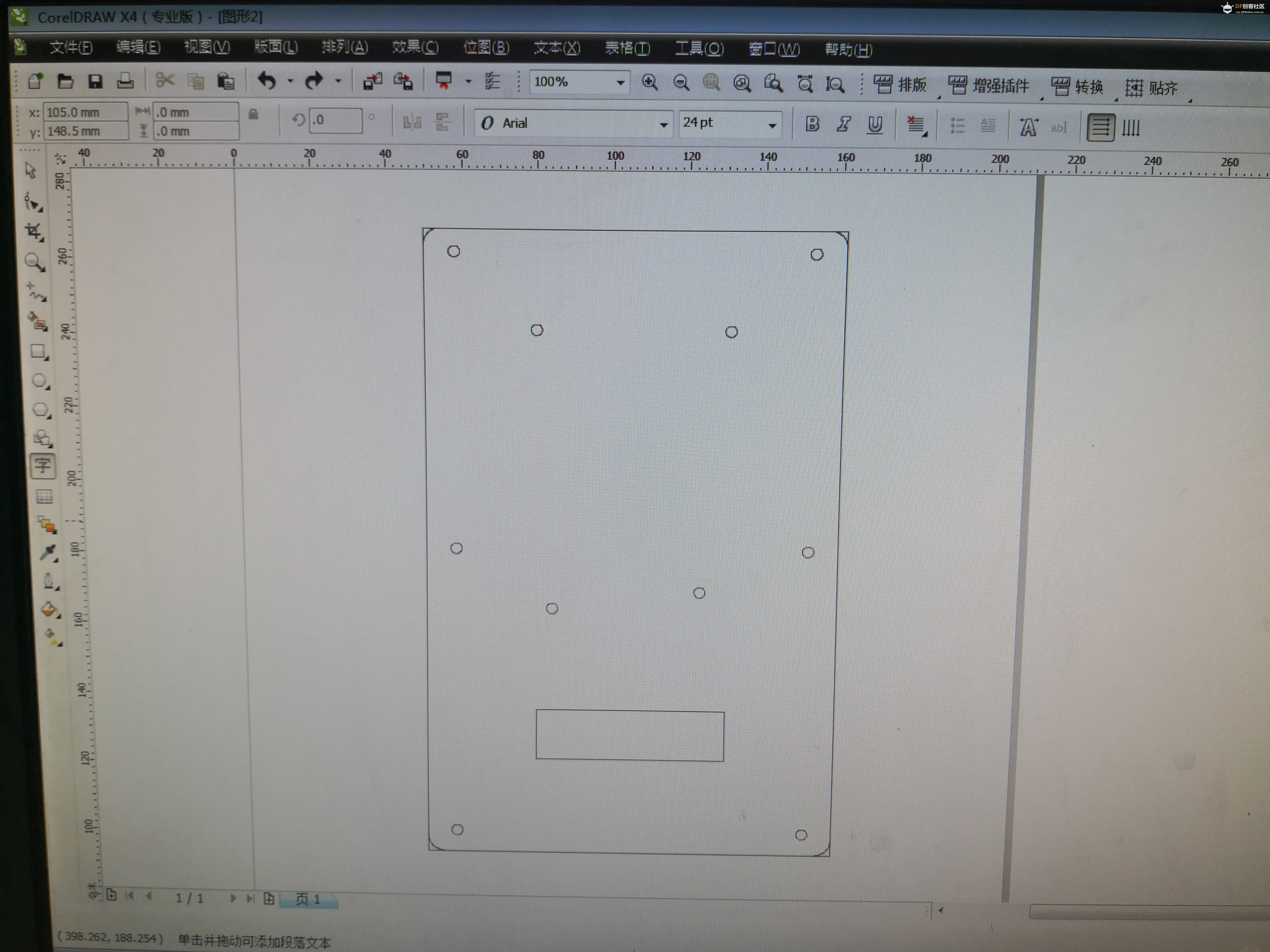 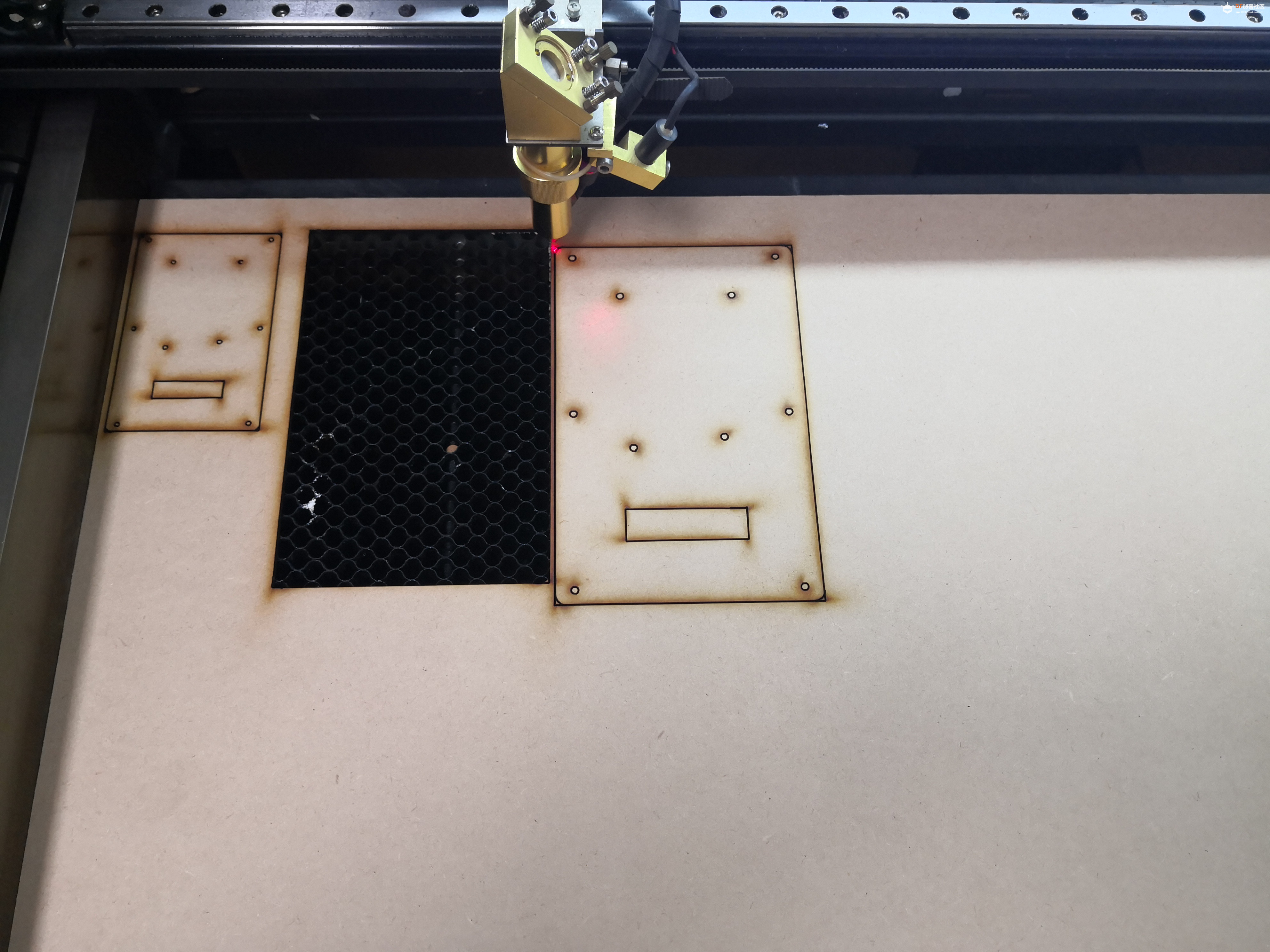 四、语音控制 高中套件语音识别改名三侠客,和三剑客比起来,各有优劣。 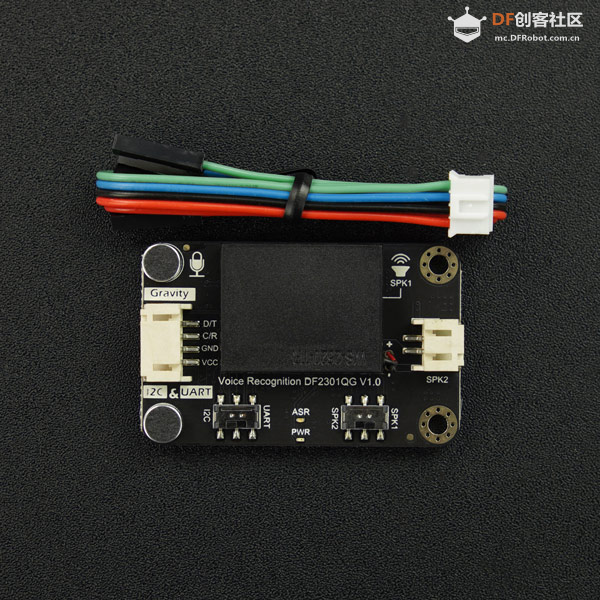  新的语音模块没有加入MIND+模块,还需要从用户库添加,另外,老板使用拼音作为关键词,识别效率着急人,新版虽说使用大量固定命令词,并且可以添加自定义命令词,甚至自带喇叭,每一句识别都有语音回应,着实抢了语音和成模块的一部分饭碗,但是不多,在识别速度上喜人,真正使用后才知道自己选择语音识别控制小车运动,一开始就错了,延时比老版语音识别还要大。关于语音模块再说最后一句,再说就跑题了,新的语音模块逻辑类似机芯智能的su-03系列,但是只有语音添加命题词功能,却缺了连线编辑,设置自由度低了点。 新扩展版虽然很贴心的把2812、电机驱动对应端口印在板子上,但想让小车动起来还要写几个函数,这点不如老版,没有对应模块可以直接选择,当然相信MIND+的下一版更新就能解决,这也不用怀疑。  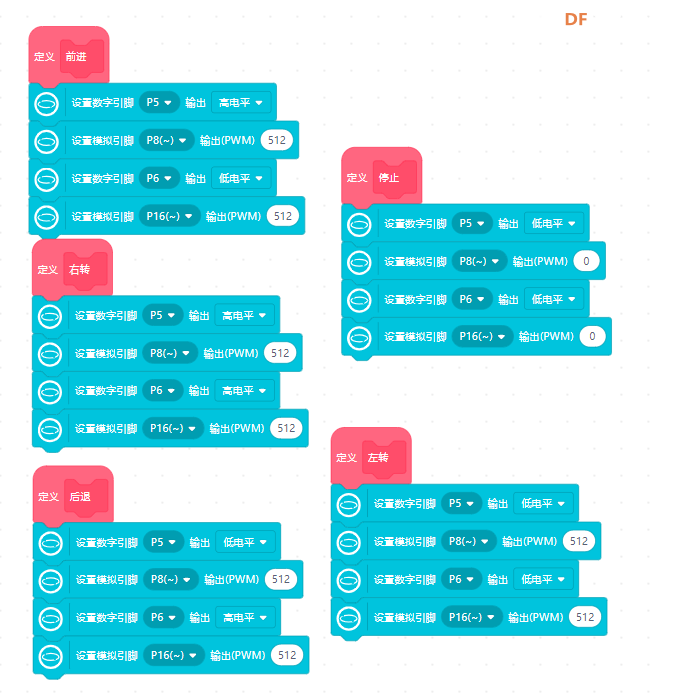 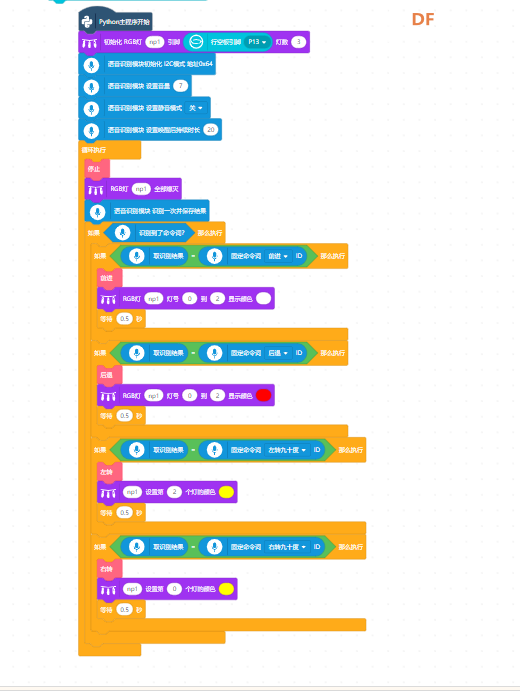 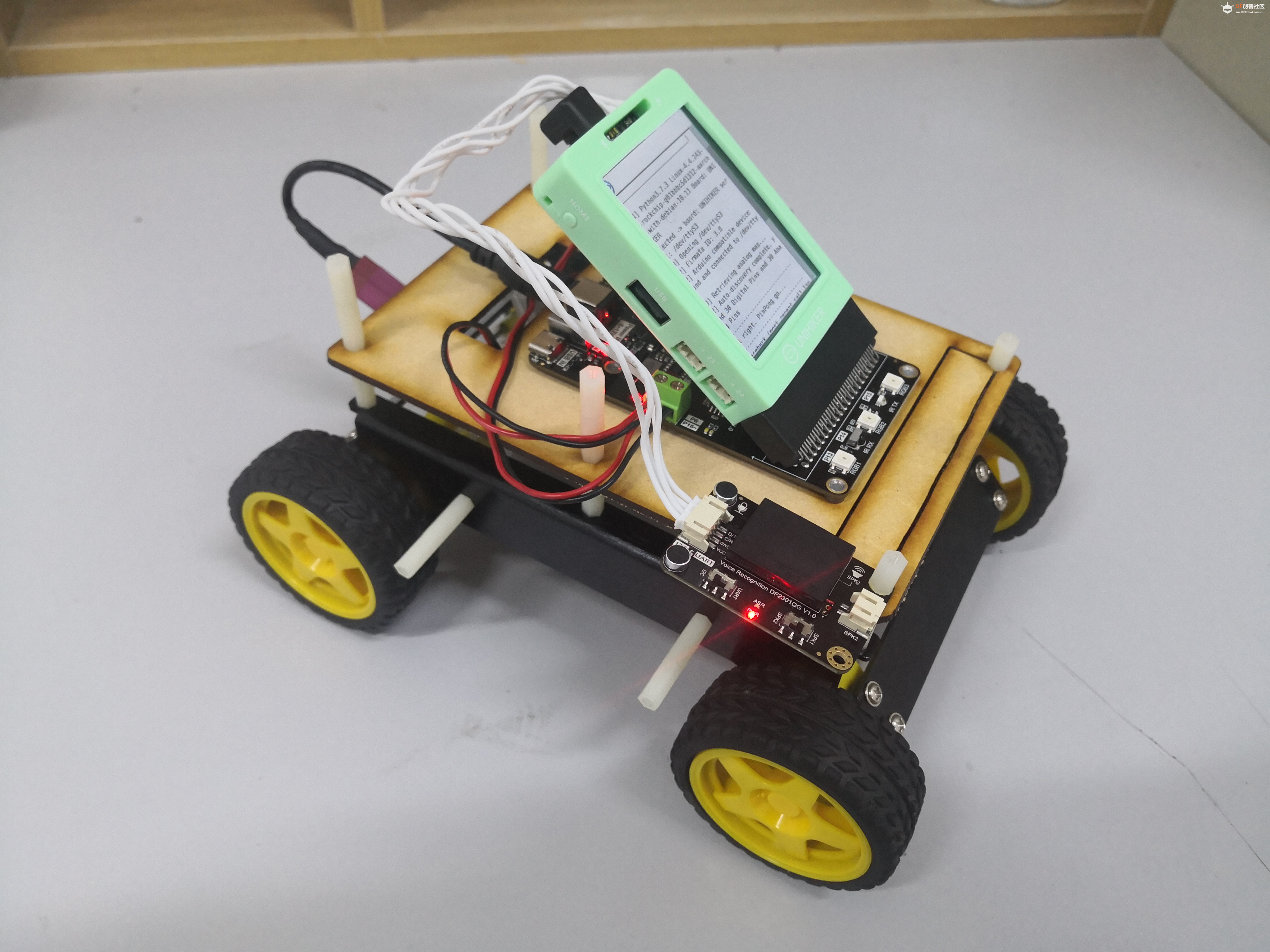 五、总结 1、5V 供电能力应对哈士奇、语音合成、语音识别,性能足够。 2、舵机电压只能使用3.3V 驱动,如果可以改进5V 或类似UNO扩展板单独供电就更好了,这是新旧两个板子都没有解决的问题。 3、电池供电接口只有3.5接口,和USB供电部分不连接,建议可以使用升压电路为电池供电,这样适合长期作品。 六、勘误 产品维库[size=14.6667px]产品特点介绍部分:电池供电接口只有3.5接口,没有接线柱。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






