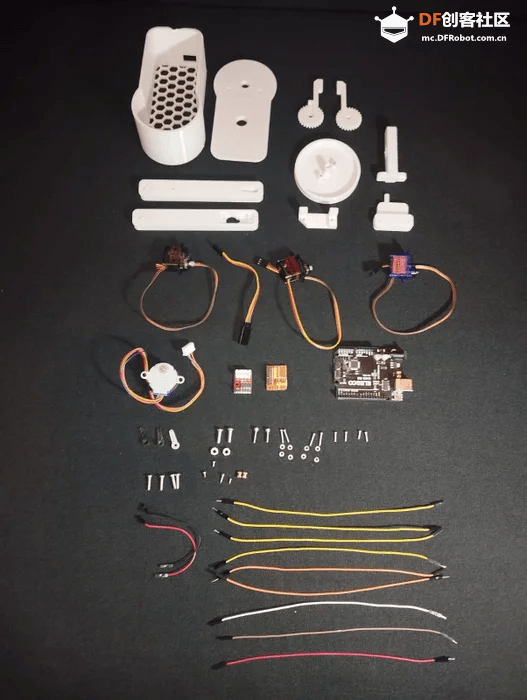
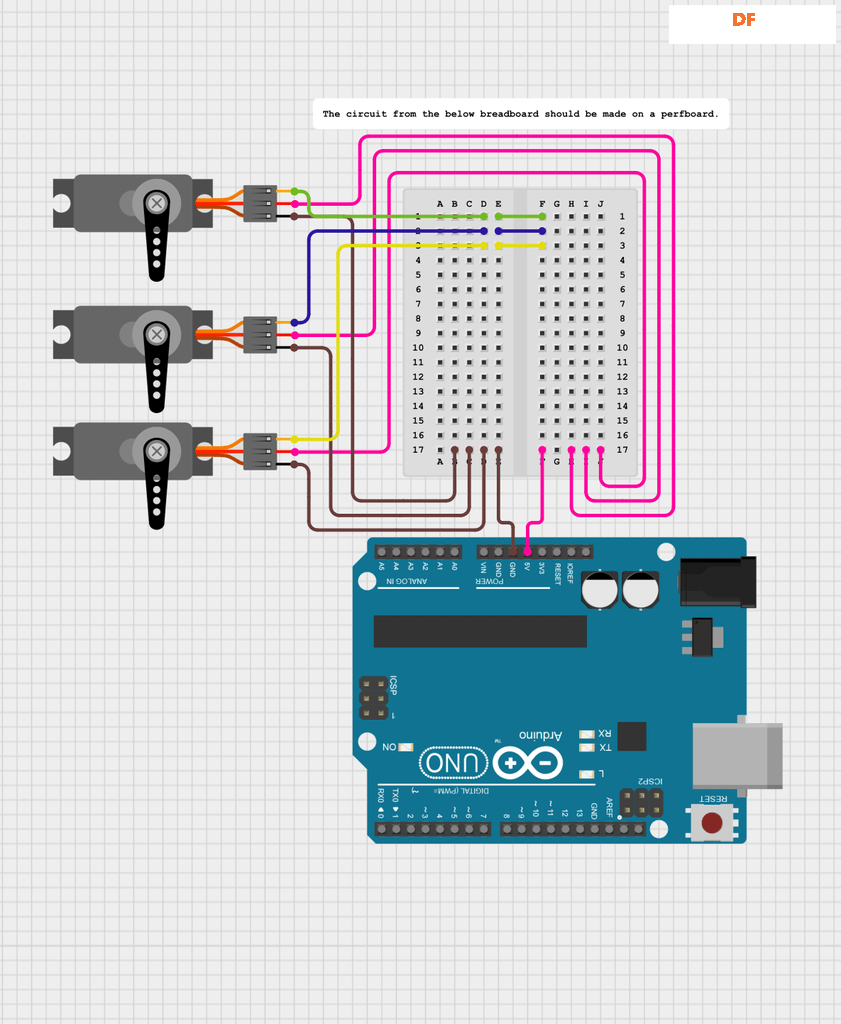
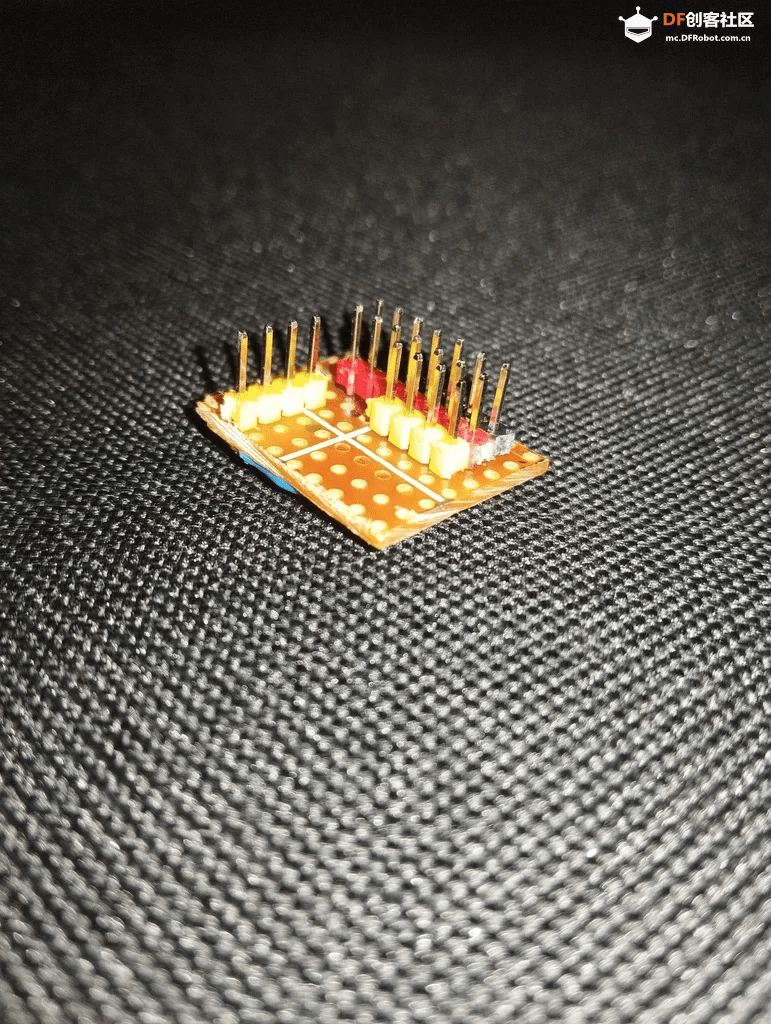
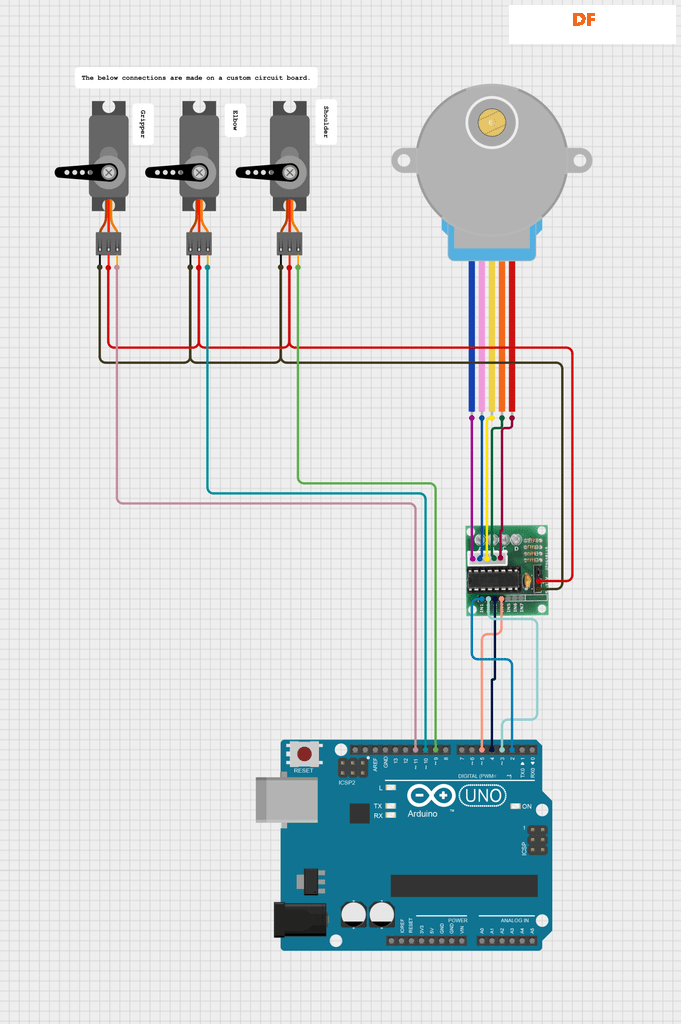
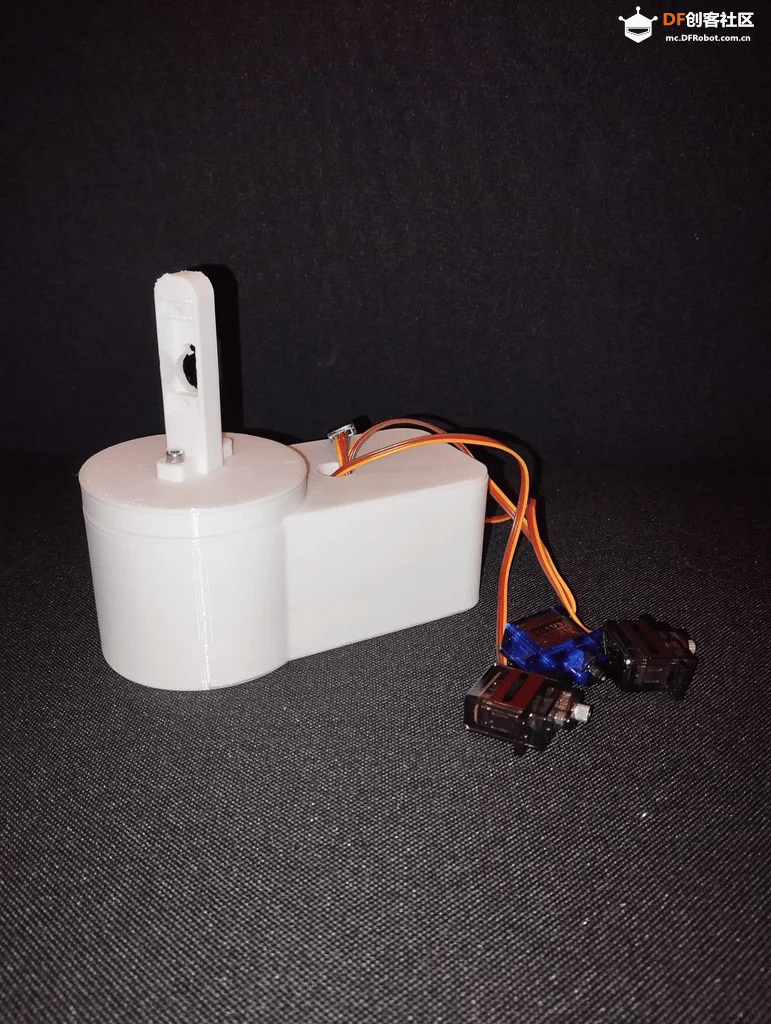
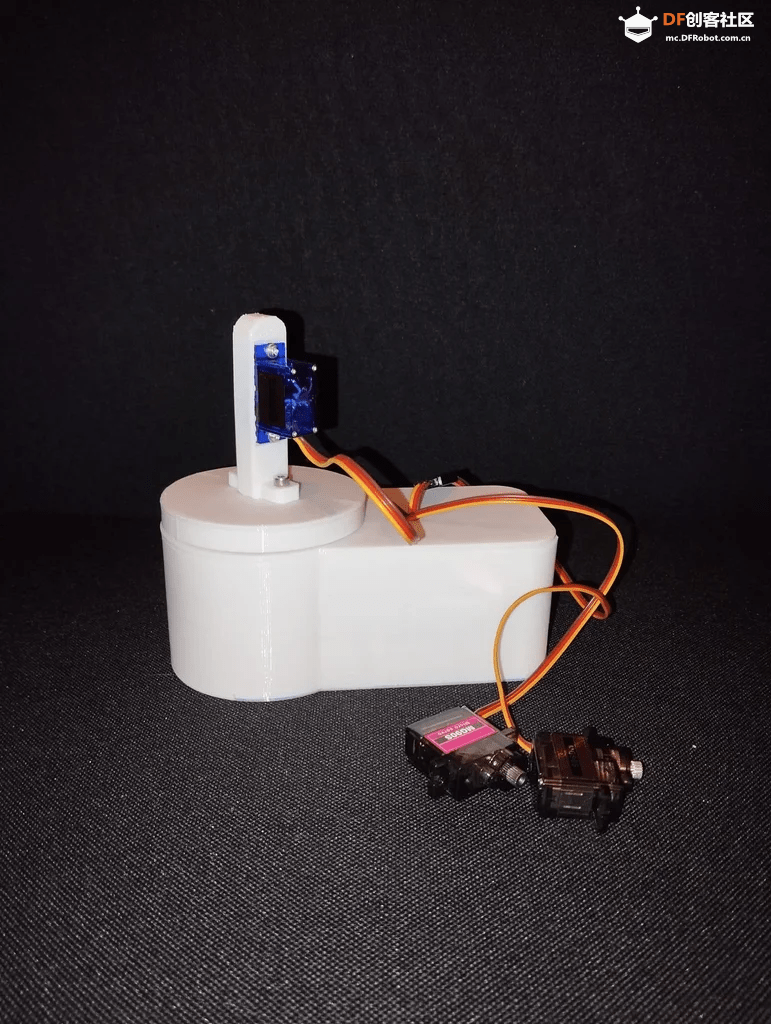
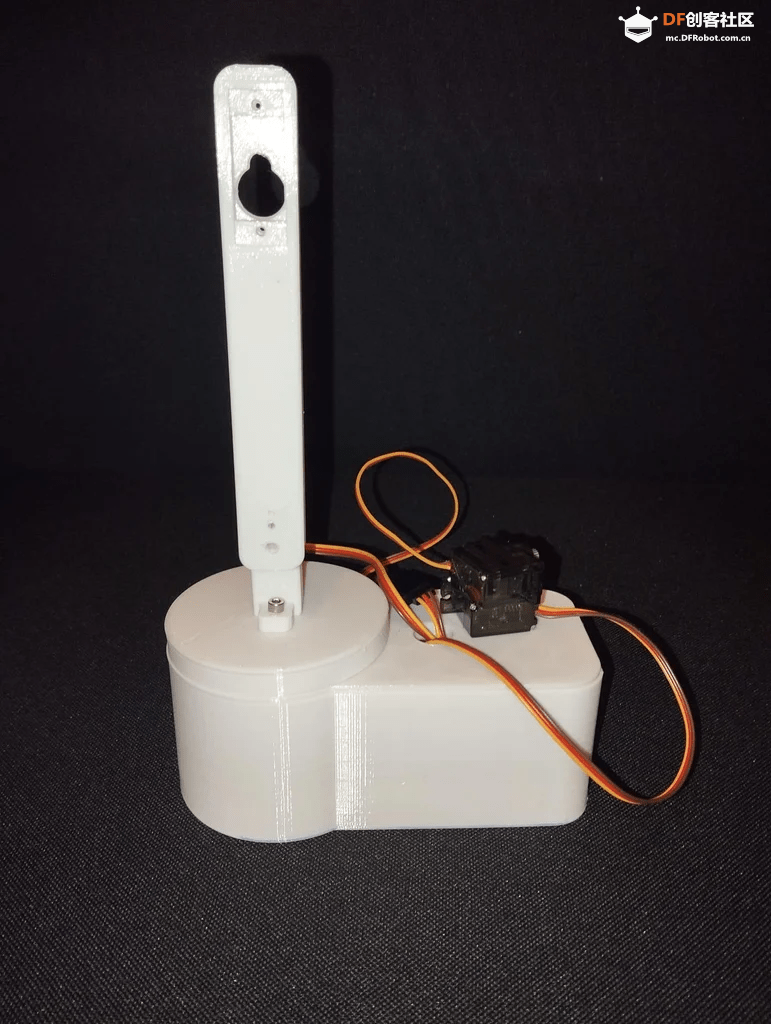
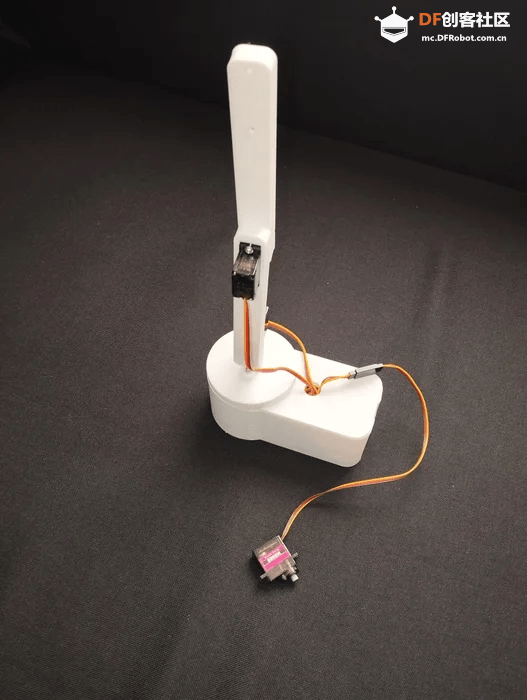
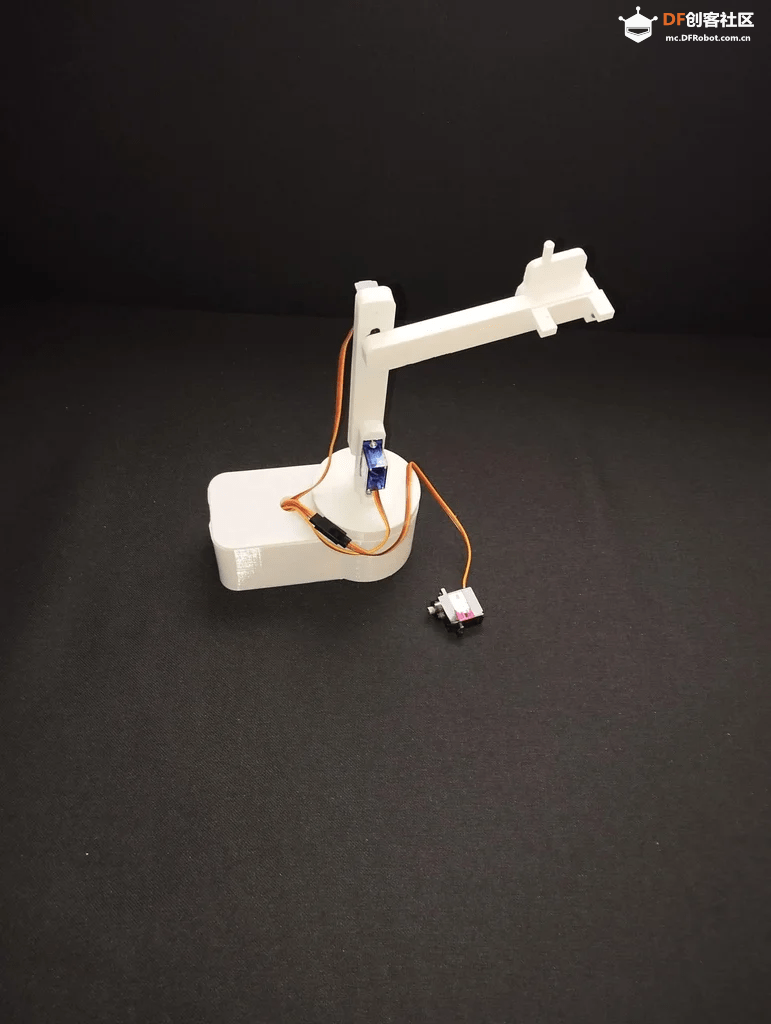
本帖最后由 RRoy 于 2025-1-15 16:29 编辑 机器人 手臂配备了MG90s伺服电机、28BYJ-48步进电机,以及许多3D打印 部件。材料清单 3D打印部件 基座舱体 x 1 基座盖 x 1 左夹爪 x 1 右夹爪 x 1 下臂 x 1 上臂 x 1 基座圆盘 x 1 肩部伺服支架 x 1 夹爪伺服支架 x 1 夹爪支架 x 1 MG90s伺服电机 x 2 SG92R伺服电机 x 1(可以用MG90s替代) 28BYJ-48步进电机 x 1 ULN2003驱动器 x 1 自定义“伺服驱动”板 x 1(见步骤1) Arduino Uno伺服轮 x 3(如图所示的类型) M4x12mm螺栓 x 2 M4螺母 x 2 M3x10mm螺栓 x 2(12mm也可以) M2x12mm螺栓 x 4 M2垫圈 x 8 M2x7mm螺栓 x 4(将12mm切割至7mm) M3x12mm螺栓 x 4 固定伺服轮的螺钉 x 3 M2x7mm螺钉 x 1(来自伺服“套件”) M3x5mm热插入件 x 2 20cm公对母跳线 x 9 10cm母对母跳线 x 2 10cm伺服线延长线 x 1(可以用普通跳线替代) 步骤1:自定义“伺服驱动”板 为什么要制作这个板? 如何制作这样的板? 信号引脚1(靠近电源轨) - 信号引脚1 信号引脚2(靠近电源轨) - 信号引脚2 以此类推 步骤2:组装基座 基座 弯曲基座 安装步进电机 安装基座圆盘 将所有部件组装在一起 步骤3:接线 IN1 - 2(Arduino) IN2 - 3(Arduino) IN3 - 4(Arduino) IN4 - 5(Arduino) 信号引脚1(最左侧) - 9(Arduino) 信号引脚2 - 10(Arduino) 信号引脚3 - 11(Arduino) 安装伺服电机 小贴士 步骤4:肩关节组装 肩部伺服支架安装 安装伺服电机 安装下臂 #include <Servo.h>
Servo myServo; // Create a Servo object
void setup() {
myServo.attach(9); // Attach the servo to pin 9
myServo.write(90); // Set servo to 90 degrees
}
void loop() {
// No action is needed in the loop for this task
} 复制代码 步骤5:肘关节组装 复制代码 复制代码 步骤6:夹爪组装 步骤7:上传代码到Arduino 将Arduino连接到计算机 安装并打开Arduino IDE 将以下代码粘贴到IDE中 选择正确的端口和板(Arduino Uno) 点击上传! // CONFIG //
const int STEPPER_IN1 = 2;
const int STEPPER_IN2 = 3;
const int STEPPER_IN3 = 4;
const int STEPPER_IN4 = 5;
const int STEPS_PER_REVOLUTION = 2048;
const int SHOULDER_IN = 9;
const int ELBOW_IN = 10;
const int GRIPPER_IN = 11;
// INCLUDE //
#include <Arduino.h>
#include <Servo.h>
#include <Stepper.h>
// VARIABLES //
Servo shoulder;
Servo elbow;
Servo gripper;
Stepper base(STEPS_PER_REVOLUTION, STEPPER_IN1, STEPPER_IN3, STEPPER_IN2, STEPPER_IN4);
int joint;
int amount;
int currentShoulder;
int currentElbow;
int currentGripper;
int currentBase;
// FUNCTIONS //
void moveServos(int shoulderAngle, int elbowAngle, int gripperAngle);
void moveStepper(Stepper stepper, int degrees);
void calibrate();
// MAIN CODE //
void setup(){
//Start Serial
Serial.begin(9600);
//Set up motors
shoulder.attach(SHOULDER_IN);
elbow.attach(ELBOW_IN);
gripper.attach(GRIPPER_IN);
base.setSpeed(10); // lower than 15 is recommended, above 25 will break the motor
currentBase = 0;
//Set servos into Zero position
shoulder.write(97);
currentShoulder = 97;
elbow.write(90);
currentElbow = 90;
gripper.write(160);
currentGripper = 160;
//calibrate();
// delay(1000);
// moveServoSmooth(elbow, 0, 45, 5);
// moveStepper(base, -0.25f);
// delay(1000);
// moveServoSmooth(shoulder, 90, 0, 5);
// moveServoSmooth(elbow, 45, 0, 5);
}
void loop() {
while (Serial.available() > 0) {Serial.read();} // Clear
while (Serial.available() == 0) {} // Wait for data
String consoleInput = Serial.readString(); //Read data
consoleInput.trim(); //Trim, to remove any EOL characters or similiar
if(consoleInput.length() == 12){
int baseInput = consoleInput.substring(0,3).toInt();
int shoulderInput = consoleInput.substring(3,6).toInt();
int elbowInput = consoleInput.substring(6,9).toInt();
int gripperInput = consoleInput.substring(9,12).toInt();
moveStepper(base, baseInput-360);
moveServos(shoulderInput,elbowInput,gripperInput);
Serial.print("recieved: '");
Serial.print(consoleInput);
Serial.println("'");
Serial.println("done");
}
else{
Serial.println("Wrong input!");
}
}
// FUNCTIONS //
void moveServos(int shoulderAngle, int elbowAngle, int gripperAngle) {
//17ms
bool finishedServos[] = {false,false,false};
while(true){
if(currentShoulder != shoulderAngle){
if (currentShoulder < shoulderAngle){
shoulder.write(currentShoulder+1);
currentShoulder++;
delay(17);
}
if (currentShoulder > shoulderAngle){
shoulder.write(currentShoulder-1);
currentShoulder--;
delay(17);
}
}
else{
finishedServos[0] = true;
}
if(currentElbow != elbowAngle){
if (currentElbow < elbowAngle){
elbow.write(currentElbow+1);
currentElbow++;
delay(17);
}
if (currentElbow > elbowAngle){
elbow.write(currentElbow-1);
currentElbow--;
delay(17);
}
}
else{
finishedServos[1] = true;
}
if(currentGripper != gripperAngle){
if (currentGripper < gripperAngle){
gripper.write(currentGripper+1);
currentGripper++;
delay(17);
}
if (currentGripper > gripperAngle){
gripper.write(currentGripper-1);
currentGripper--;
delay(17);
}
}
else{
finishedServos[2] = true;
}
if(finishedServos[0] && finishedServos[1] && finishedServos[2]){
break;
}
}
finishedServos[0] = false;
finishedServos[1] = false;
finishedServos[2] = false;
}
void moveStepper(Stepper stepper, int degrees){
stepper.step((2048/360)*(currentBase-degrees));
currentBase = degrees;
digitalWrite(STEPPER_IN1, LOW);
digitalWrite(STEPPER_IN2, LOW);
digitalWrite(STEPPER_IN3, LOW);
digitalWrite(STEPPER_IN4, LOW);
}
void calibrate(){
// Serial.println("The servos in 5s will be set to a pole like position");
// delay(5000);
// moveServoSmooth(shoulder, 0, 90, 5);
// moveServoSmooth(elbow, 0, 90, 5);
// Serial.println("If the servos aren't in a pole like position, please adjust them, you have 10s");
// delay(10000);
// Serial.println("Now please set the stepper motor into such a positon, that the arm is facing toward the hole that the wires go into. You have 10s");
// moveServoSmooth(elbow, 90, 0, 5);
// delay(10000);
// Serial.println("Calibration complete!");
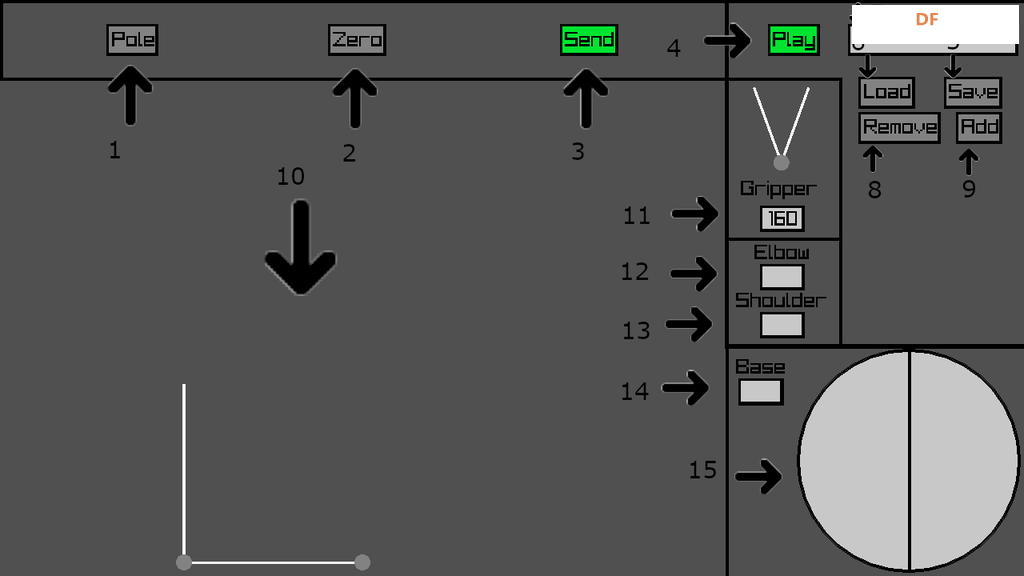
} 复制代码 步骤8:通信协议 前三个数字是用于基座的,记住基座要移动到的位置是你输入的值减去360度。 接下来的三个数字是用于肩部的,它会直接移动到你输入的位置。 再后面的三个数字是用于肘部,其工作方式与肩部相同。 最后三个数字是用于夹爪的,它们的工作方式与肘部相同,但我不建议设置夹爪低于90度。 步骤9:PC程序 下载和(可选)编译 https://hsf-training.github.io/hsf-training-cmake-webpage/02-building/index.html 。步骤10:如何使用? 将机器人设置为类似极点的位置。 将所有电机的设置归零。 向机器人发送11、12、13、14的值。 播放当前加载的程序。 保存当前的程序。 在顶部栏输入程序名称以加载程序,这也可以用来创建新文件。 输入你的程序名称。 从加载的文件中删除最后一个位置。 将当前的11、12、13、14值添加到当前文件中。 大致显示你即将发送到手臂的数据。 输入夹爪的值,并显示出来。 输入肘部的值。 输入肩部的值。 输入基座的值。 大致显示基座的方向。 https://www.instructables.com/A- ... vos-and-28BYJ-48-S/ 












 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






