|
2879| 0
|
[K10项目分享] 基于行空板K10的智能晾衣物联网系统装置 |
|
本帖最后由 高山流水 于 2025-1-18 14:12 编辑 项目名称:基于行空板K10的智能晾衣物联网系统装置 一、项目研发背景 随着社会的发展和科技的进步,人们的生活质量不断提高,对家居智能化和便捷性的需求也越来越高。传统的晾衣方式往往受天气影响较大,晾衣空间有限,且晾晒过程中需要频繁关注天气变化,给日常生活带来不少麻烦。为了解决这一问题,我们仁诚共享创客团队提出了设计一款基于行空板K10的智能晾衣物联网系统装置的设想,本项目立足于当前市场需求和技术背景,致力于打造一款能够为用户提供便捷、智能晾衣体验的产品,以提升现代家庭的生活品质。 该项目旨在利用人工智能和物联网技术,实现晾衣过程的自动化和智能化,从而提高生活的便捷性和舒适度。通过实时监测环境温湿度,智能判断晾衣的最佳时机,并在必要时自动收回衣物,避免因天气突变导致的衣物损坏。此外,该系统还能有效节约空间,提高家庭空间的利用率。 二、项目简介 本项目聚焦于人工智能与物联网在日常生活中的创新应用,旨在打造便捷、智能的晾衣体验,助力健康生活,通过通过人工智能与物联网技术,实现晾衣过程的智能化,为现代家庭生活带来便捷与智能化体验;提升人们生活的便捷性和舒适度;融合科技与实用,开启智能家居新篇章。本项目旨在利用行空板K10为核心控制器,通过物联网技术与人工智能的结合,利用其内置的多色灯组、光线传感器、温湿度传感器、蜂鸣器及OLED显示器和其它执行器舵机等硬件,设计并实现一个智能晾衣系统。该系统能够实时监测环境温湿度,根据晾衣需求自动调整晾衣状态,并在湿度过高时自动关闭门窗并收回晾衣架,从而确保衣物的干燥和室内的健康环境。系统利用行空板K10内置的温湿度传感器实时监测环境温湿度,当湿度超过预设阈值时,自动触发报警并控制门窗关闭、晾衣架收回,有效防止衣物受潮。该系统聚焦于健康生活新设计,实现了一种自动化的晾衣环境监测与控制。 (一)行空板K10的显示界面 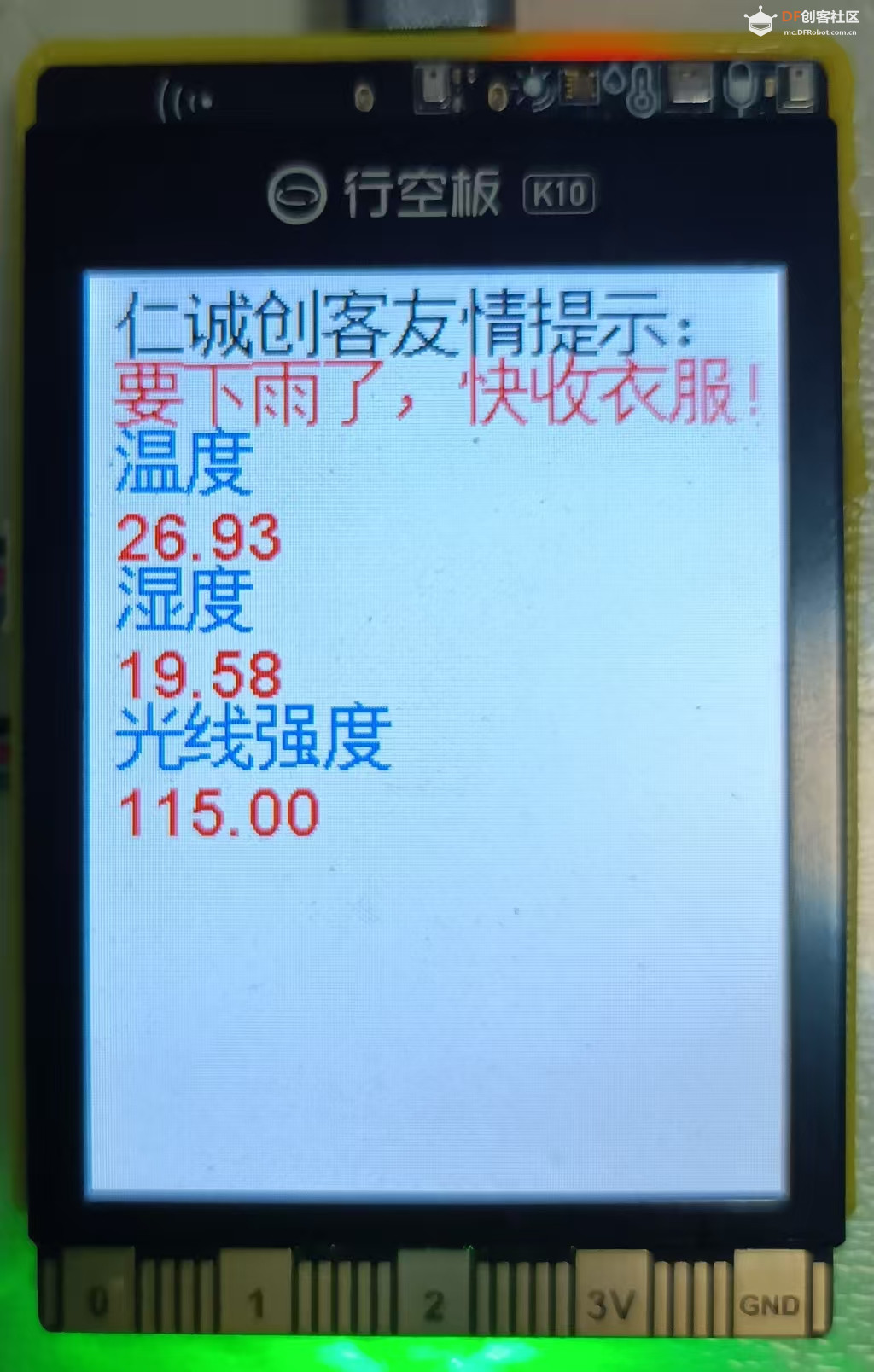 (二)作品成果演示视频 (三)硬件连接图  三、项目知识点 本项目既贴合新课标中六年级的“反馈是过程与控制中的重要手段”内容要求,又与新课标中,八年级主题为“物联网实践与探索”相契合,是跨年级物联网与人工智能学习的结合体。 (一)核心知识:智能晾衣物联网系统 1.物联网技术:通过温湿度传感器采集环境数据,经行空板 K10 处理,借助无线传输控制舵机、蜂鸣器动作,实现设备间互联互通。作为整个系统的连接基础,实现各硬件组件之间的数据传输与交互。 2.人工智能技术:行空板 K10 内置智能算法,依据预设湿度阈值判断晾衣适宜性,自动执行保护指令,模拟人类智能决策。用于设定阈值判断、逻辑控制等,使系统具备“智能”决策能力。 3.机械控制:舵机接收信号精准转动,驱动门窗开合、晾衣架移动,将电信号转化为机械动能。 4.健康生活理念:系统设计的出发点和目标,以满足人们对健康晾晒衣物的需求。 (二)硬件组件 1.行空板K10 行空板K10(内置温湿度传感器、蜂鸣器、光线传感器和多色灯组)、舵机功能模块等核心组件;内置的温湿度传感器:获取环境温湿度数据的源头,实时显示温湿度;内置的蜂鸣器:用于发出报警声,提醒用户湿度超标;内置的多色灯组:点亮红色LED灯:作为湿度超标时的视觉提醒信号。 2.舵机控制模块 两个舵机分别连接门窗开关和晾衣架,控制门窗开关和晾衣架动作,根据来自行空板K10的控制湿度阈值是否超限灯信号执行相应的动作。 (三)软件逻辑 1.数据采集:从温湿度传感器读取数据,然后进行数据处理。 2.阈值判断:将采集到的湿度数据与预设的晾衣阈值进行比较。 3.控制逻辑执行:根据判断结果,如果超过阈值,执行包括报警(蜂鸣器和红灯)、门窗关闭、晾衣架收回等一系列动作。 (四)功能实现 1.环境监测:利用行空板K10内置的温湿度传感器实时获取环境中的温度和湿度信息。在终端设备(如显示屏)上显示当前的温度和湿度等情况,方便用户随时了解晾衣环境的状况。 2.异常预警与处理:当湿度超过设定的晾衣阈值时,系统会触发报警机制。此时,蜂鸣器发出报警声,同时内置红灯亮起以提醒用户。不仅如此,系统会自动启动舵机控制操作。舵机一方面控制门窗关闭,减少外界高湿度空气的进入;另一方面控制晾衣架自动收回屋内,避免衣物在高湿度环境下长时间晾晒可能出现的受潮、发霉等问题。 四、项目原理 (一)数据采集原理 行空板K10的温湿度传感器基于电容式或电阻式原理工作。对于电容式温湿度传感器,湿度的变化会引起传感器电容值的改变,温度的变化同样会根据特定材料的特性影响电容或电阻值。通过内置的电路将这些物理量的变化转换为数字信号,这些数字信号被行空板K10的处理器所获取。 (二)控制原理 舵机的控制来自于行空板K10向舵机发送特定频率和脉宽的信号。舵机内部有一个控制电路,根据接收到的信号来调整电机的转动角度。对于控制门窗开关的舵机,根据信号转动一定角度,从而带动门窗的连杆机构实现开关动作;对于控制晾衣架的舵机,同样按照信号转动,使晾衣架上连接的绳索或机械结构运作,实现晾衣架的收回动作。 (三)报警机制 当湿度数据超过阈值时,行空板K10的微控制器根据预先编写的程序逻辑,向蜂鸣器发送高电平信号(如果是低电平触发则相反),使蜂鸣器发声。同时,向控制红灯的电路发送信号,点亮红灯。这种逻辑控制基于程序中的条件判断和信号输出指令。 五、所用硬件介绍 (一)行空板K10 1.功能概述 行空板K10是一块集高性能处理器、显示屏、多种接口于一体,是系统核心,负责数据处理、指令下达与信息显示,搭载操作系统,可便捷开发编程的开发板,包含了多种传感器接口、控制接口和处理器。它具备处理数据和执行控制逻辑的能力。 2.主要功能组件 (1)温湿度传感器 :能够精确测量周围环境的温度和湿度,测量范围通常为温度-20℃-80℃,湿度0% -100%RH,精度根据具体型号不同。 (2)蜂鸣器:一种电-声转换器件,当接收到合适的电信号时就会发出声音,可作为系统的报警装置。 (3)多色灯组(LED指示灯):通过发光二极管实现视觉指示功能,用于在特殊情况下(如湿度超标)提醒用户。 (4)舵机控制模块:专门设计用于与舵机连接的接口模块,具备调整输出信号频率和脉宽的能力,以控制舵机的工作状态。 (二)舵机 1.工作原理 舵机是一种位置(角度)伺服驱动器,主要由外壳、电路板、电机、减速齿轮组等组成。它将行空板K10发送的电信号转换为精确的角度转动。 2.规格特点 通常具有不同的扭矩和转动角度范围。本项目选用合适扭矩和转动角度能够满足门窗开关和晾衣架收回控制需求的舵机。 六、硬件原理 (一)行空板K10硬件原理 1.处理器与传感器接口 处理器负责整体的数据运算和控制指令发布。传感器接口与温湿度传感器相连,采用模拟或数字(如I2C协议)方式进行数据传输。 2.输出接口 内置的蜂鸣器、多色灯组灯和舵机控制模块连接的接口。对于蜂鸣器和多色灯组,通过控制引脚的电平高低来实现功能;对于舵机控制模块,输出合适的PWM(脉冲宽度调制)信号。 (二)舵机硬件原理 1.信号接收与处理 舵机接收来自行空板K10的PWM信号,通过对信号脉宽的解析确定转动的角度目标。 2.动力与传动 内部电机根据控制信号转动,电机的动力通过减速齿轮组减速增扭,最终带动舵机的输出轴旋转到目标角度。 七、编程设计流程图 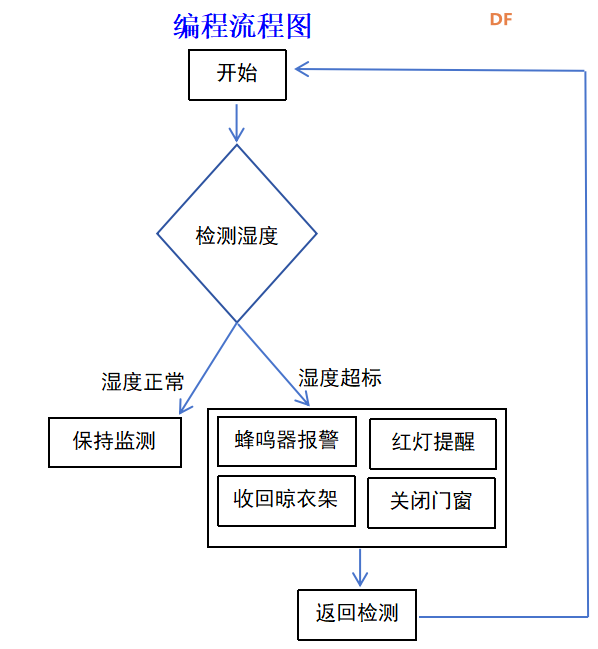 (初始化——数据采集——数据处理——报警与控制——循环检测) 八、重点程序截图 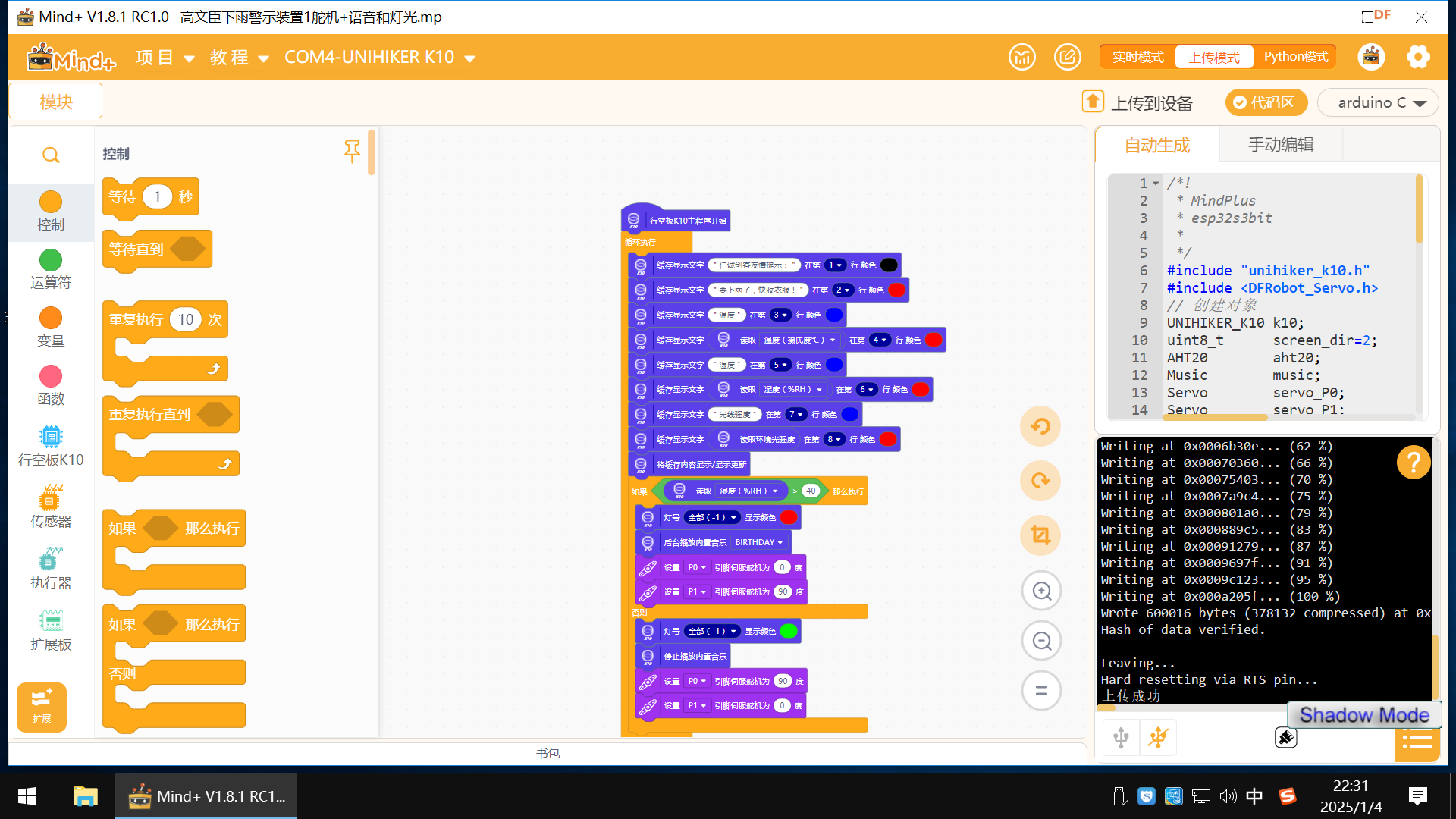 通过以上设计,本项目成功实现了基于行空板K10的智能晾衣物联网系统,为健康生活提供了新的设计思路和实践探索。 九、程序附件 |

1.34 MB, 下载次数: 1969
程序附件



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






