|
一、项目背景 随着智能交通技术的快速发展,汽车安全辅助系统已成为现代汽车的重要组成部分。依据《义务教育信息科技课程教学指南》六年级“过程与控制”第26课,倒车雷达作为典型的过程与控制系统,通过实时检测车辆与障碍物的距离,计算安全阈值,并根据距离变化动态调整警报频率,为驾驶员提供安全保障。本方案以行空板K10为核心,设计一个简易的倒车雷达系统,帮助学生理解以下核心概念: - 输入-计算-输出的控制模式(超声波传感器采集距离数据→行空板处理→蜂鸣器报警)。
- 连续量与开关量的转换(距离值为连续量,通过阈值判断生成警报指令的开关量)。
- 反馈与优化机制(根据距离变化动态优化警报频率)。
- 模块化设计思想(分解超声波测距、数据处理、警报输出等子模块)。
设计案例贴合课程中“倒车防撞请注意”的实例,符合“通过分析典型应用场景理解过程与控制”的教学要求,同时融入信息社会责任教育(强调系统安全性设计)。 二、项目目标依据《义务教育信息科技课程教学指南》六年级“过程与控制”模块的学业要求,本方案旨在通过倒车雷达的设计与实现,提升学生以下能力: 信息意识 - 体验汽车倒车场景中物理世界(障碍物距离)与数字世界(传感器数据)的深度融合。
- 意识到“输入-计算-输出”计算模式在解决实际问题中的价值,例如通过程序验证倒车安全控制逻辑。
计算思维 - 将倒车雷达分解为超声波测距、阈值判断、警报输出三个子模块,初步掌握复杂系统的分解方法。
- 理解阈值(如安全距离)在连续量转开关量中的作用,并能通过逻辑运算设计动态警报规则(距离越近→警报越急促)。
- 通过阅读和修改代码,感受距离数据变化对警报输出的影响,认识编程对功能实现的重要性。
数字化学习与创新 - 利用行空板K10和开源编程工具,设计倒车雷达的验证方案,通过调试程序优化系统性能(如响应速度、警报灵敏度)。
- 在小组合作中制定实验方案,通过数据记录与分析(如距离与警报频率关系表)形成实验报告。
信息社会责任
- 理解倒车雷达的安全性设计对驾驶者和社会的重要性,初步形成系统安全设计意识(如误报处理、故障保护)。
- 通过对比国产与进口传感器数据采集精度,感知核心技术自主可控的意义。
三、项目实施
1.所需器材
行空板K10
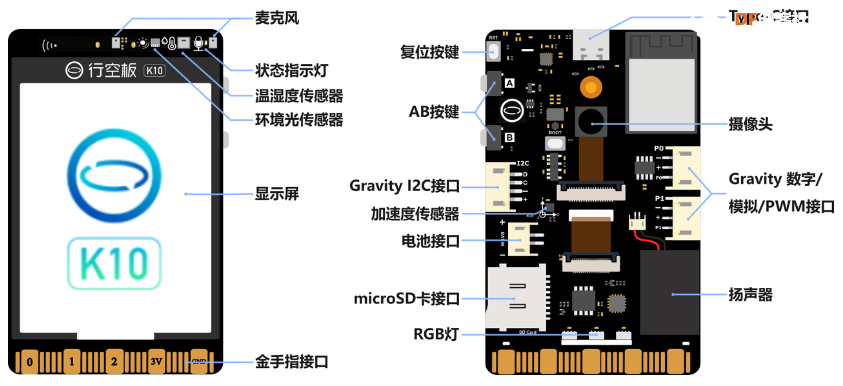
超声波传感器
小车底盘
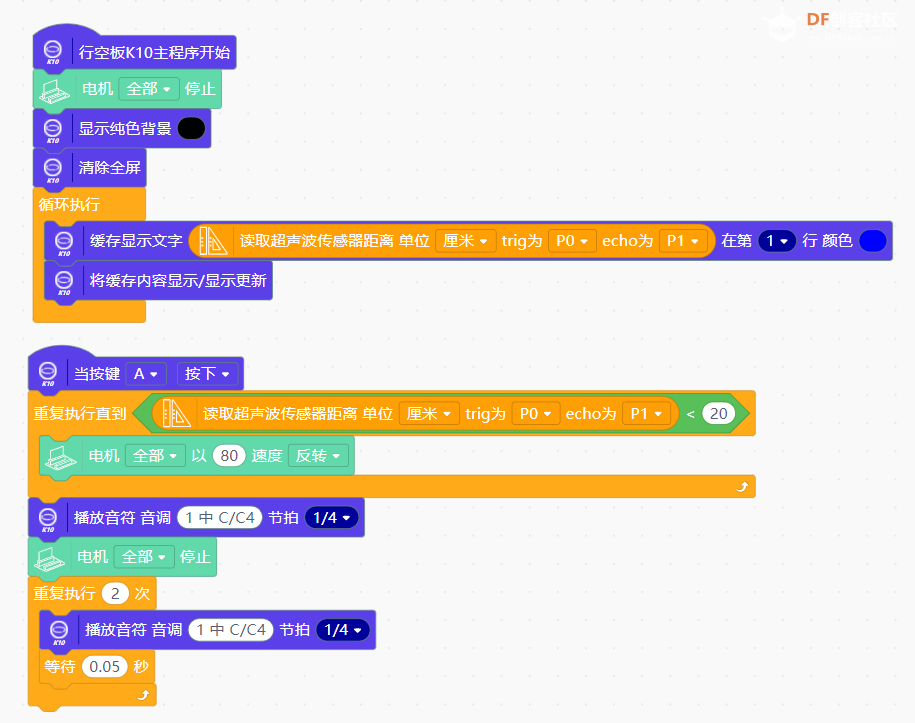
2.实现功能
按下A键小车向后倒车,当超声波传感器检测到前言障碍物的距离小于20CM时,蜂鸣器发出预警,同时停车。
3.程序编写
- /*!
- * MindPlus
- * esp32s3bit
- *
- */
- #include "unihiker_k10.h"
- #include <DFRobot_URM10.h>
- #include <Microbit_Motor.h>
- // 函数声明
- void onButtonAPressed();
- // 创建对象
- Microbit_Motor motorbit;
- UNIHIKER_K10 k10;
- uint8_t screen_dir=2;
- DFRobot_URM10 urm10;
- Music music;
-
-
- // 主程序开始
- void setup() {
- k10.begin();
- k10.initScreen(screen_dir);
- k10.creatCanvas();
- k10.buttonA->setPressedCallback(onButtonAPressed);
- motorbit.motorStop(ALL);
- k10.setScreenBackground(0x000000);
- k10.canvas->canvasClear();
- }
- void loop() {
- k10.canvas->canvasText((urm10.getDistanceCM(P0, P1)), 1, 0x0000FF);
- k10.canvas->updateCanvas();
- }
-
-
- // 事件回调函数
- void onButtonAPressed() {
- while (!((urm10.getDistanceCM(P0, P1))<20)) {
- motorbit.motorRun(ALL, CCW, 80);
- }
- music.playTone(262, 2000);
- motorbit.motorStop(ALL);
- for (int index = 0; index < 2; index++) {
- music.playTone(262, 2000);
- delay(50);
- }
- }
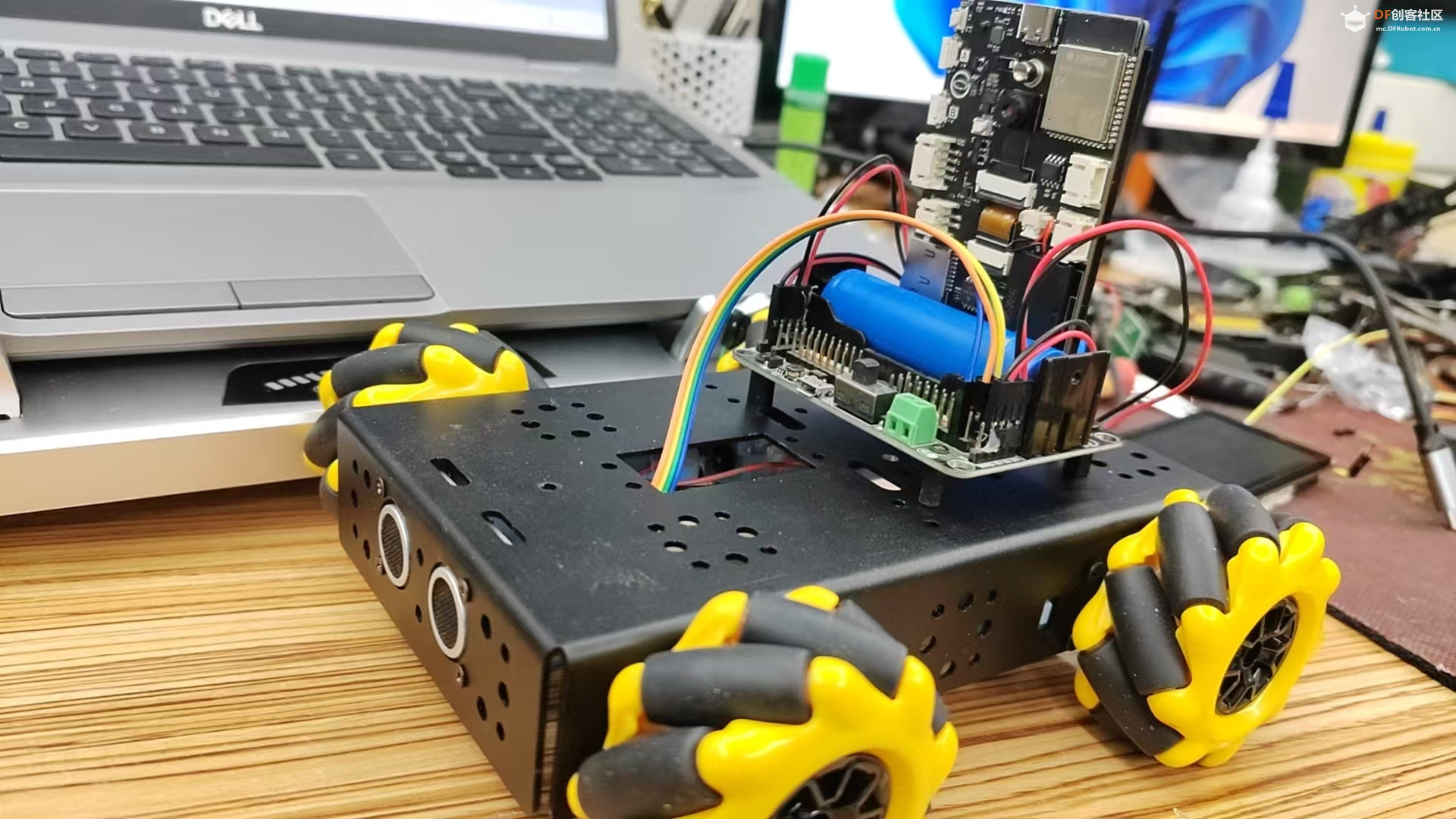
四、实现效果
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






