|
3568| 0
|
[K10项目分享] 项目实践案例征集K10-六年级第26课 倒车防撞请注意 |
本帖最后由 Isabella_J 于 2025-2-20 18:34 编辑     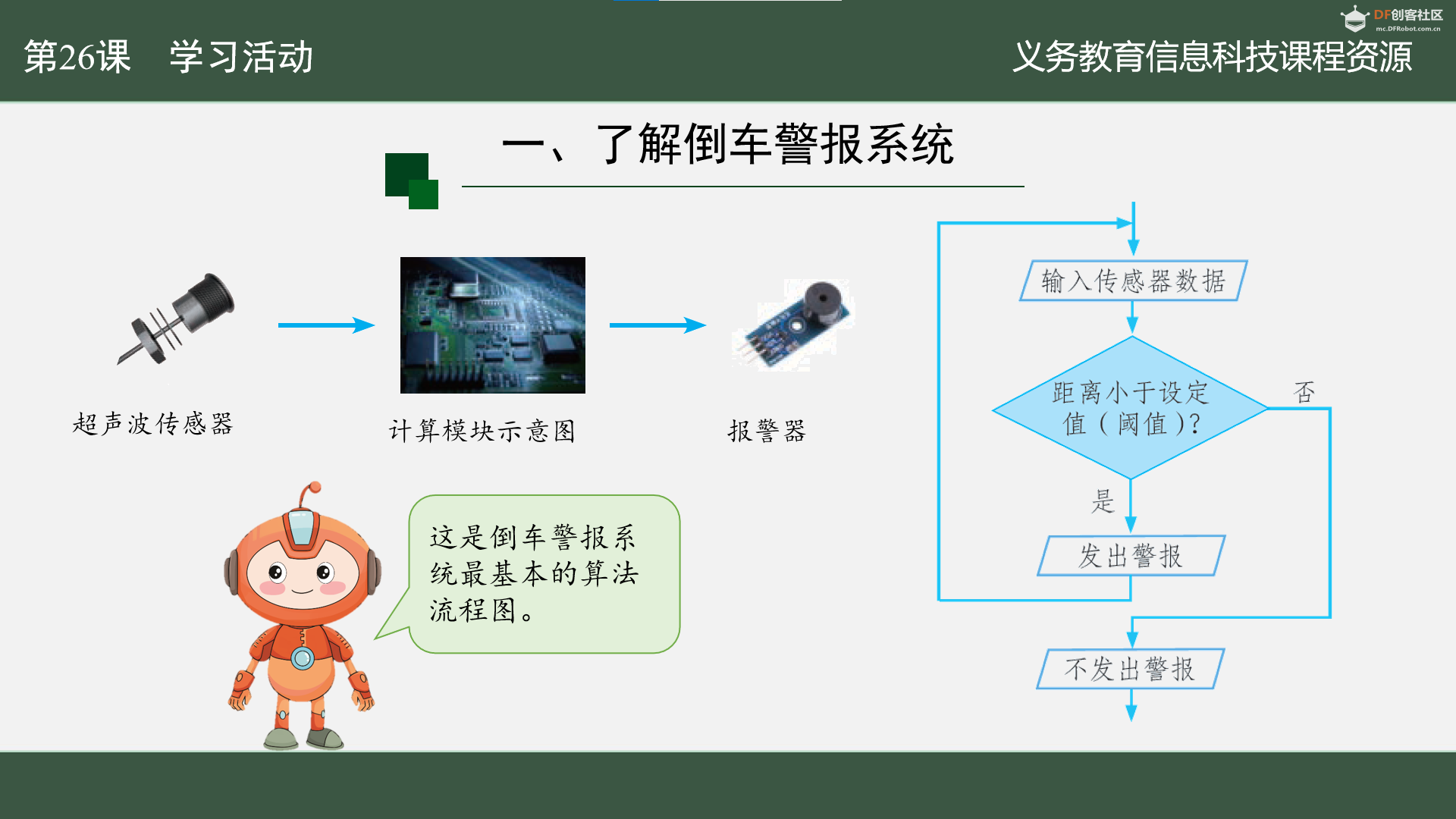 本案例需要结合扩展https://www.dfrobot.com.cn/goods-1966.html 超声波传感器,型号如下:  注意:VCC连接扩展板的5V,GND连接扩展板的GND,Trig连接P0端口,Echo连接P1端口。 另外还应该注意要单独给扩展板供电,才能带动超声波传感器,测出准确距离,否则超声波测出的距离为0。 代码如下: 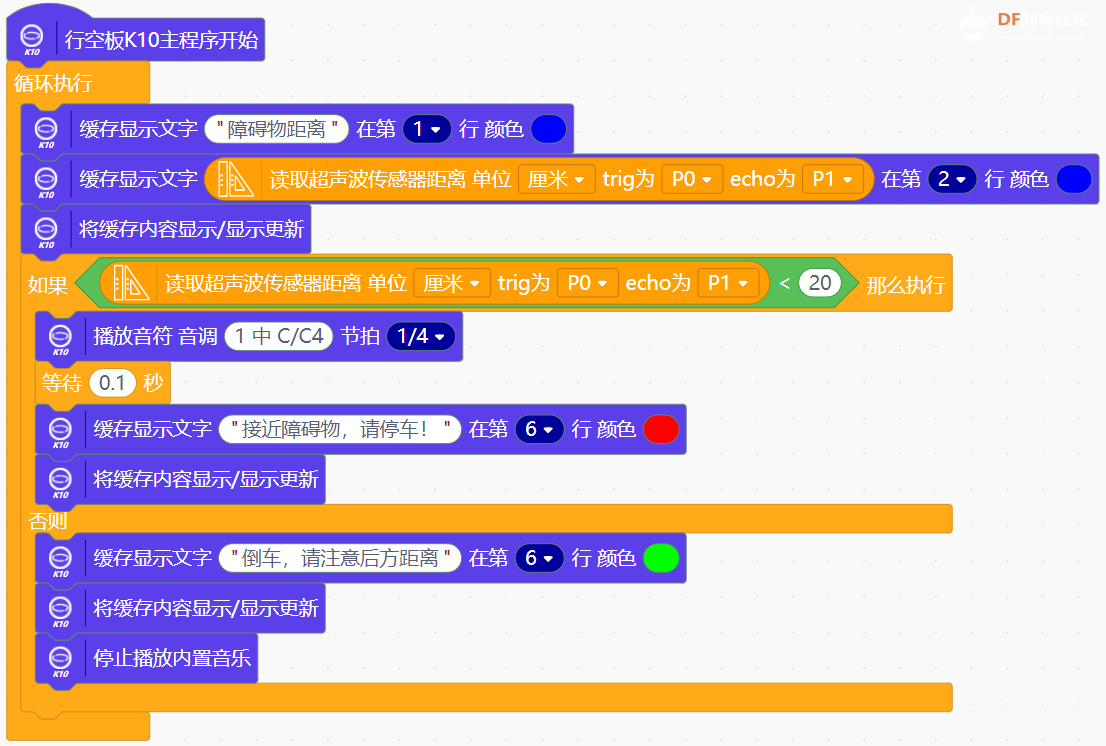 /*! * MindPlus * esp32s3bit * */ #include "unihiker_k10.h" #include <DFRobot_URM10.h> // 创建对象 UNIHIKER_K10 k10; uint8_t screen_dir=2; DFRobot_URM10 urm10; Music music; // 主程序开始 void setup() { k10.begin(); k10.initScreen(screen_dir); k10.creatCanvas(); } void loop() { k10.canvas->canvasText("障碍物距离", 1, 0x0000FF); k10.canvas->canvasText((urm10.getDistanceCM(P0, P1)), 2, 0x0000FF); k10.canvas->updateCanvas(); if (((urm10.getDistanceCM(P0, P1))<20)) { music.playTone(262, 2000); delay(100); k10.canvas->canvasText("接近障碍物,请停车!", 6, 0xFF0000); k10.canvas->updateCanvas(); } else { k10.canvas->canvasText("倒车,请注意后方距离", 6, 0x00FF00); k10.canvas->updateCanvas(); music.stopPlayTone(); } } |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






