|
4624| 8
|
[M10教程] 在行空板 M10 上使用小龙虾是种什么样的体验? |

|
本帖最后由 微笑的rockets 于 2026-4-3 17:29 编辑 在行空板 M10 上使用小龙虾是种什么样的体验? 本文介绍在行空板 M10 上部署PicoClaw(科技圈 “小龙虾” AI 框架)的完整教程。对比多款 Claw 框架后,选定适配 ARM64、内存占用低的 PicoClaw。教程包含 M10 联网、下载安装、大模型配置、飞书机器人对接等步骤,实现轻量 AI 助手本地运行,解决传统 AI 部署安全、权限与设备适配难题,为创客提供可直接复刻的 M10+AI 实战方案。 导语 小龙虾的横空出世,让大家都感觉到了人工智能的热潮,普通人都感受到了小龙虾的热度。但是我们也发现,小龙虾有着很多的问题,要不就是安全问题,权限过大,要不就是黑盒,谁都不知道发生了什么。谁都不愿意在自己工作的电脑上运行。但小龙虾又装在哪里呢?Mac mini 是很好,但并不是每个人都可以选择的。 想要找到一个合适的虾缸来养虾看样子并不是一个简单的任务。 作为创客,我们发现,其实有一个非常不错的硬件就在我们手上,那就是行空板 M10。 行空板M10是一款专为Python学习和使用设计的新一代国产开源硬件,采用单板计算机架构,集成LCD彩屏、WiFi蓝牙、多种常用传感器和丰富的拓展接口。同时,其自带Linux操作系统和Python环境,还预装了常用的Python库,让广大师生只需两步就能进行Python教学。 M10 作为一款运行完整 Linux 系统的开发板,正好可以让我们来运行小龙虾。本教程就带大家一起手把手安装小龙虾到行空板 M10,让大家实现小龙虾自由。 背景 好了,我们准备把行空板 M10变成我们的虾缸,选择哪个小龙虾变成了我们的第一个任务,那选哪个小龙虾呢?现在市面上有太多的 xxxclaw 了。长话短说,我给大家列了一个对比表。  是的openclaw原版需要使用nodejs环境和较大内存,在行空板M10上无法安装。其他的那些 claw 也有着各种各样的问题,其实最适合的是 zeroclaw,但他功能太过于精剪,很多功能没有。因此总的判断下来我们使用的是 picoClaw picoclaw 的 github 链接,放在这里 :https://github.com/sipeed/picoclaw.git 那接下来,我们就一步一步的带大家来操作一下。 那这篇文章就带大家来把环境搭建一下,安装一下 picoClaw 安装方法 行空板M10联网 按照M10的教程:[url=https://www.unihiker.com.cn/wiki/m10/webmenu]https://www.unihiker.com.cn/wiki/m10/webmenu[/url]  当我们将 M10 连上网之后,我们就可以安装 picoClaw 了。 下载&安装
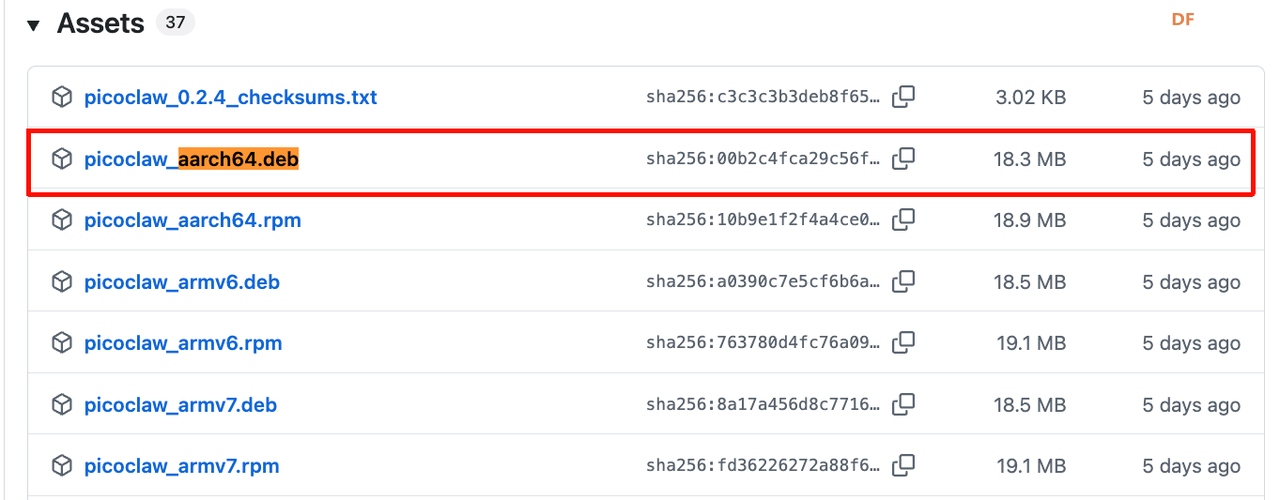 最新的版本是 0.2.4
下载+安装 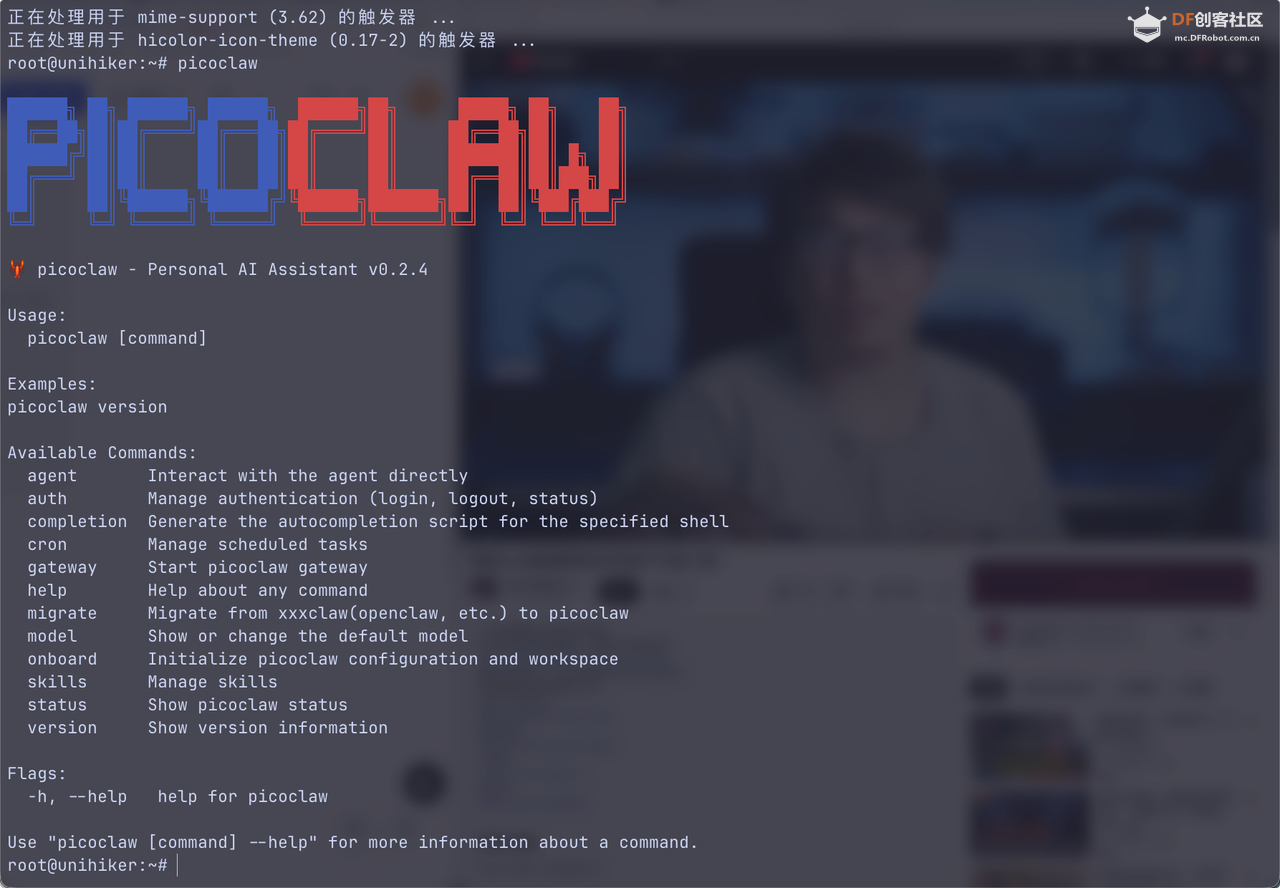 安装好以后,可以看到相应的版本 配置大模型
 这个命令运行后才会有.picoclaw/config.json文件,找不到的小伙伴应该先执行这个命令。
修改文件: ~/.picoclaw/config.json - 配置模型 - 在model_list中找到所用的模块,此处以glm4.7为例,填入从模型官网获取的api_key - 注意:由于openclaw消耗token量大,建议使用codingplan套餐,api_base链接改为: 这里一定要注意!!!选错 api_base 会让你的账单燃烧! 这里一定要注意!!!选错 api_base 会让你的账单燃烧! 这里一定要注意!!!选错 api_base 会让你的账单燃烧! 下面这个链接是 api key 的页面。 https://open.bigmodel.cn/usercenter/proj-mgmt/apikeys 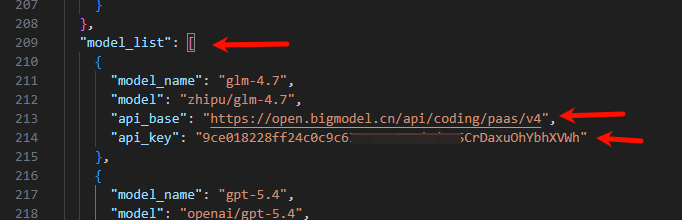 - 在agents的defaults中的model_name字段填入上一步的model_name名称 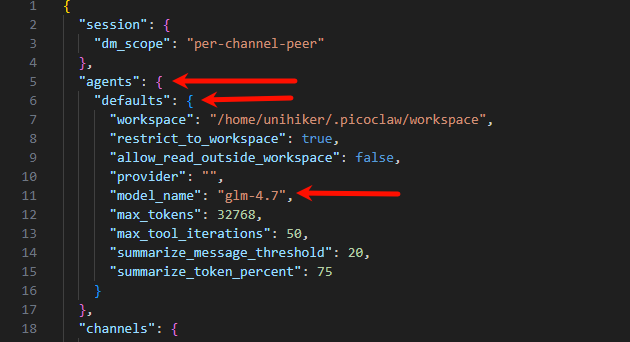 - 测试效果  配置飞书 - 飞书开放平台(https://open.feishu.cn/app/)创建一个应用 - “添加应用能力”>”按能力添加“>“机器人”>“+添加”,添加一个机器人后无需其他配置,先点顶部“创建版本”保存,确认发布  - “凭证与基础信息”页面复制App ID和app Secret,填入picoclaw配置文件对应位置:~/.picoclaw/config.json - 填入从飞书平台复制的app_id和app_secret - enabled字段从false改为true 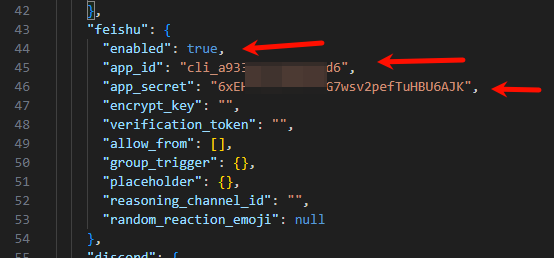 - 启动picoclaw网关 - “事件与回调”>“事件配置”>“订阅方式”选择“长连接”。(如果提示未连接,检查上一步是否都正常) - “权限管理”>“开通权限”>“批量导入/导出权限”>“导入”,清空输入框,粘贴如下,确认 - 注:如下仅为单聊权限,如果要群聊等更多权限,可自行网络搜索需要的权限 - “事件与回调”>“添加事件”>添加以下权限: - 注:如下仅为单聊权限,如果要群聊等更多权限,可自行网络搜索需要的权限 - 打开飞书,收到”开发者小助手“的消息提示应用发布成功,点打开应用 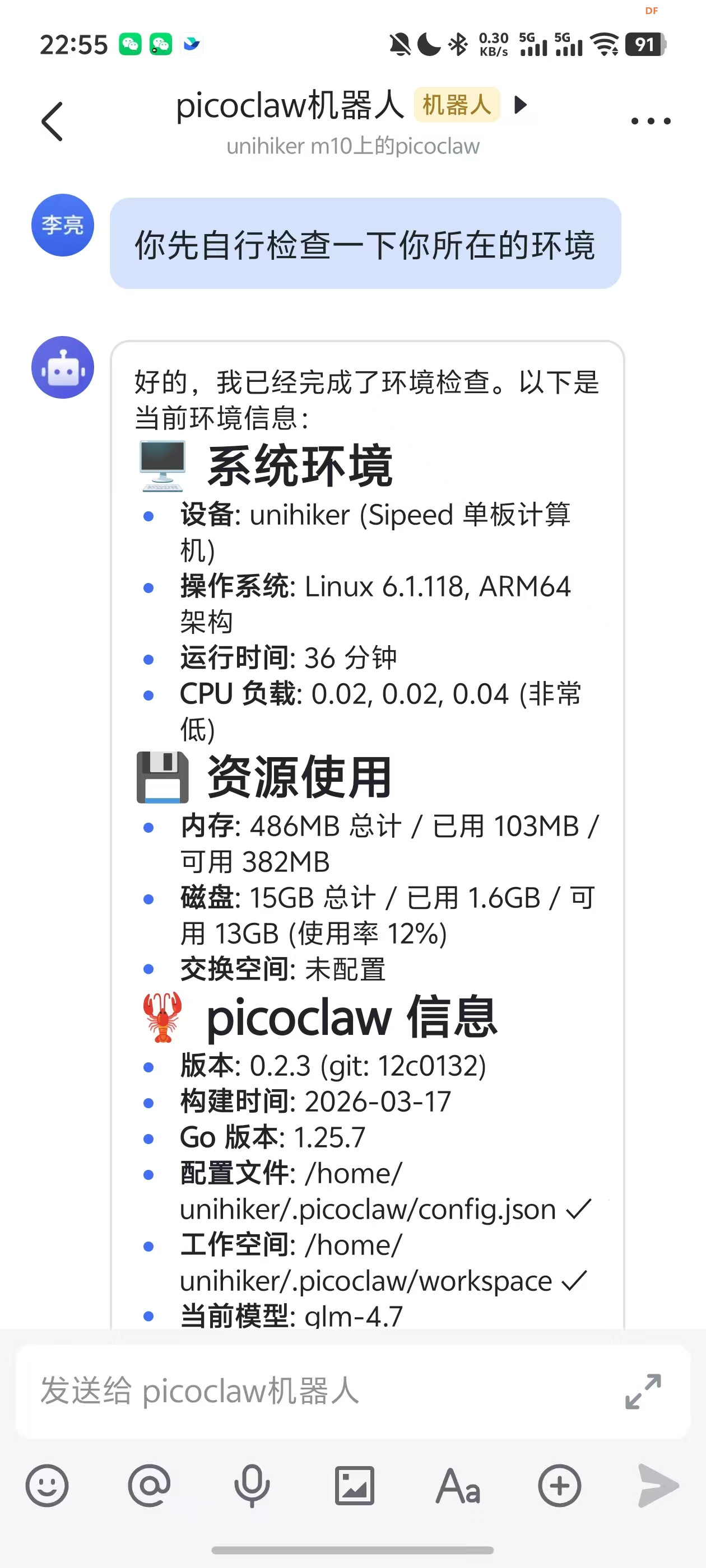 安装完成! 这样,我们的 picoClaw 就安装在我们的行空板 M10 上了。接下来,下一篇文章,我们来一起探讨如何在M10 这个虾缸里养小龙虾。 在这里也要借此机会干些行空板 M10 的产品经理李亮,是他提供的技术支持,没有他的帮助,这篇文章将难产很久。 也欢迎装好的小伙伴一起来冒个泡,我们一起探讨下,你会用小龙虾来干些什么? 一起期待下一篇《在行空板 M10 上用小龙虾干点什么好呢?》 请大家帮忙点赞,转发给你觉得想要一起养龙虾的小伙伴。 在这里在预告一下,回头帮大家争取一个获得一亿 token 的机会。请大家关注后面的文章! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 赞一个
赞一个 


 活跃会员
活跃会员
 老版主限定
老版主限定
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 编辑选择奖
编辑选择奖






