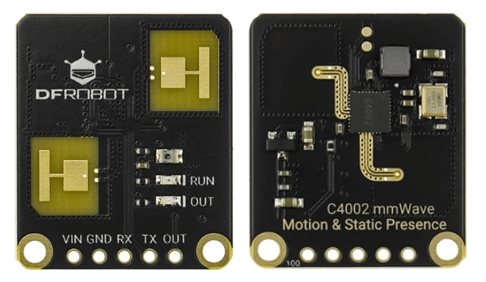
该模组支持UART串口通信与AT指令配置,可输出人体状态、探测距离、运动速度、微动能量等多维数据,出厂预校准无需复杂调试,具备低功耗、高抗干扰、高灵敏度的特性,广泛适配智能家居、办公自动化、智能楼宇、展品感应、智能安防等场景,是近距离人体存在精准感知的核心硬件。
三、核心性能测试项目及测试结果本次测试覆盖基础功能、核心性能、抗干扰、稳定性四大维度,共8项专项测试,全程记录实测数据,对比传统红外传感器(HC-SR501)性能差异,具体测试内容如下:
3.1 基础探测功能测试测试方法固定传感器安装高度1.2m(常规室内安装高度),水平探测角度标准工况,分别模拟人体快速走动、缓慢移动、指尖微动、静坐静止、人体离场五种状态,通过串口实时读取传感器输出的人体存在状态、微动能量值、距离数据,验证功能完整性。
测试结果- 人体快速/慢速移动:毫秒级识别,实时输出有人状态,探测响应灵敏,无延迟漏检;
- 人体微小动作(抬手、眨眼、肢体微动):可精准捕捉0.1mm级微小位移波动,有效识别静坐微动人体;
- 人体完全静止静坐:持续输出有人信号,彻底解决传统红外传感器“人在不动、设备误判无人”的问题;
- 人体离场:3秒内稳定切换无人状态,状态切换无卡顿、无滞后。
3.2 探测距离与角度测试测试方法以传感器为原点,水平直线逐米测距测试,分别测试1m、3m、5m、6m、8m距离下的人体检测成功率;同时测试水平左右60°、90°、120°角度范围内的探测有效性,记录有效探测范围。
测试结果- 有效探测距离:0.5-6m检测准确率100%,6-8m远距离检测准确率95%以上,8m以上探测灵敏度小幅下降;
- 探测角度:水平120°广角探测无盲区,垂直60°范围覆盖常规人体活动区域,适配室内全屋检测需求;
- 最优工作区间:1-5m室内常规场景,检测稳定性、精准度最佳。
3.3 响应与离场延时测试测试方法通过秒表记录人体进入探测区域到传感器输出有人信号的响应时间,以及人体完全离开后,传感器切换无人状态的延时时间;同时测试自定义延时参数配置效果。
测试结果- 触发响应速度:平均响应时间≤80ms,极速感应,无明显延迟;
- 默认离场延时:3秒无人判定,可通过AT指令自定义0-300秒延时,适配不同场景需求;
- 状态切换稳定,无瞬态误触发、无状态跳变问题。
3.4 环境适应性测试(光照/温度)测试方法分别在强光直射、室内自然光、黑暗无光三种光照环境,以及10℃低温、25℃常温、35℃高温环境下,持续测试1小时,观察传感器检测精度与工作状态。
测试结果C4002毫米波探测原理不受光线、温度常规变化影响,全光照环境下检测准确率无差异,高低温环境下工作稳定,无死机、误报、漏报现象,相比红外传感器,完全规避了强光干扰、低温灵敏度下降的问题,环境适配性极强。
3.5 抗干扰性能对比测试(核心测试)测试方法固定测试环境,引入风扇转动、窗帘飘动、空调吹风、宠物移动、电子设备电磁干扰5类常见室内干扰源,分别对C4002与传统HC-SR501红外传感器进行5分钟持续测试,记录误报次数。
测试结果干扰类型
| C4002误报次数
| HC-SR501误报次数
| 测试结论
|
风扇转动、空调吹风
| 0
| 8
| 毫米波可过滤机械运动干扰
|
窗帘轻微飘动
| 0
| 6
| 精准区分人体与杂物运动
|
小型宠物移动
| 0
| 5
| 可过滤小动物无效触发
|
手机、路由器电磁干扰
| 0
| 3
| 电磁抗干扰能力优异
|
核心优势:模组内置环境自适应滤波算法,可自动学习静态环境反射物、过滤规律性机械干扰,仅对人体微动、体态运动有效识别,抗干扰能力远超传统红外传感器。
3.6 低功耗性能测试测试方法通过电源检测仪监测传感器有人检测、无人待机两种状态的工作电流,持续监测2小时,记录平均功耗。
测试结果工作状态平均电流≤45mA,待机休眠状态电流≤15mA,整体功耗极低,适配电池供电类低功耗智能设备,长期待机无耗电压力,适合居家、办公无源供电场景改造。
3.7 长期稳定性测试测试方法设备持续通电72小时不间断运行,循环切换人体进入、静止、离场场景,全程记录漏检、误报、死机、离线等异常情况。
测试结果72小时连续工作无死机、无离线、无数据卡顿,检测精度稳定,无累计误判、漏检问题,环境自适应算法可持续适配环境微小变化,长期运行可靠性满足工程落地要求。
四、实际项目测试硬件接线(软串口方案,不占用硬件调试串口)
| C4002 传感器引脚 | Arduino 引脚 | 说明 |
| VCC | 5V | 供电 5V,禁止 3.3V |
| GND | GND | 共地,必须共地否则乱码 |
| TX | D2(Arduino 软串口 RX) | 传感器发数据给开发板 |
| RX | D3(Arduino 软串口 TX) | Arduino 下发 AT 指令给传感器 |
通信默认参数:波特率 115200,数据位 8,停止位 1,无校验 (8N1)
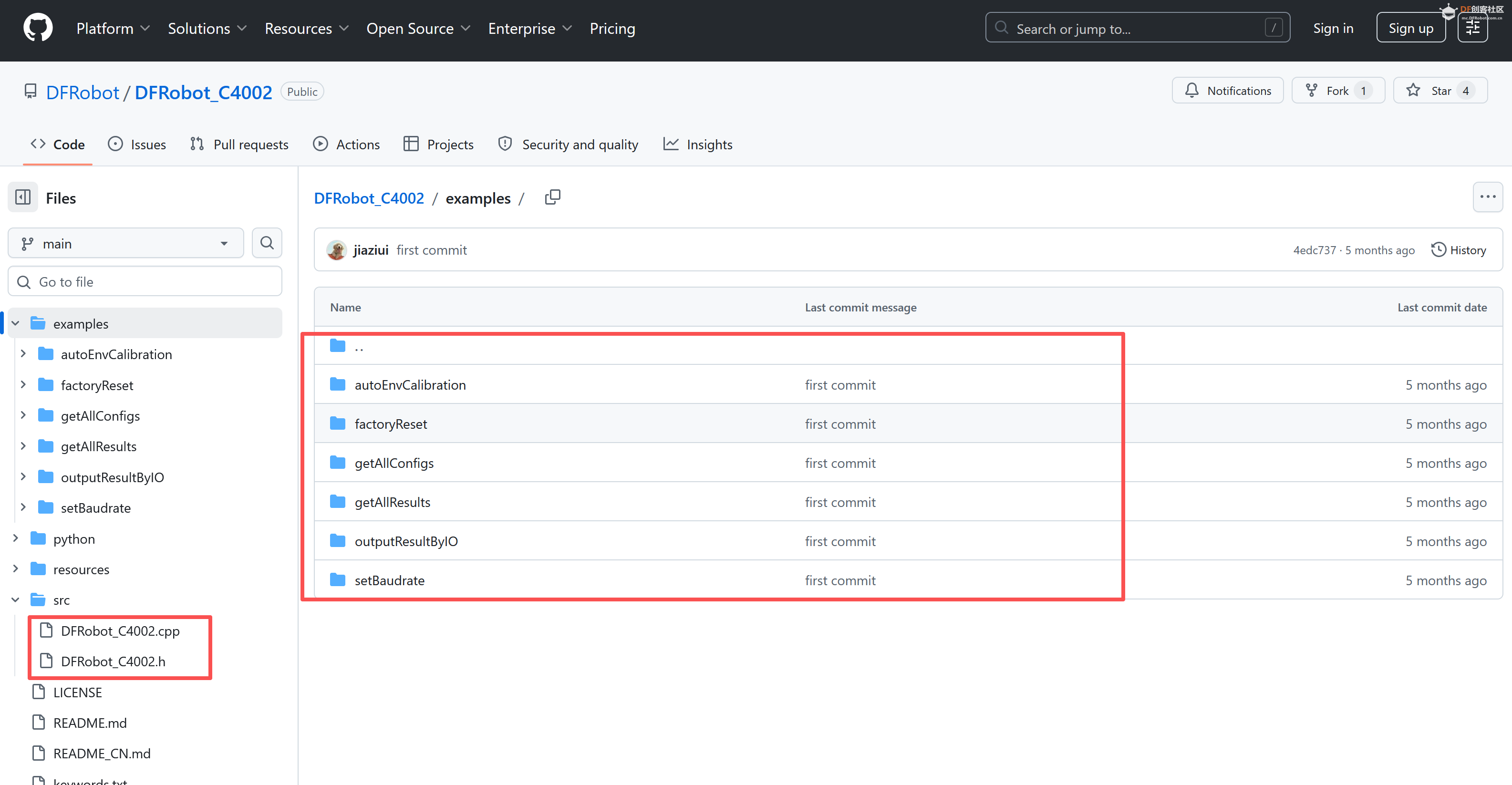
Arduino 完整串口测试代码
功能:实时打印传感器原始串口数据、自动解析有人 / 无人状态、微动能量;支持下发 AT 指令配置参数。
- #include <SoftwareSerial.h>
-
- // 软串口引脚定义
- #define RADAR_RX 2 // 接C4002 TX
- #define RADAR_TX 3 // 接C4002 RX
-
- // 实例化软串口
- SoftwareSerial radarSerial(RADAR_RX, RADAR_TX);
-
- String recBuffer = ""; // 存储单帧接收数据
-
- void setup() {
- // 电脑调试串口
- Serial.begin(115200);
- // 雷达传感器串口
- radarSerial.begin(115200);
-
- Serial.println("==== C4002 毫米波传感器串口测试程序 ====");
- Serial.println("上电等待传感器环境校准2s...");
- delay(2000);
- Serial.println("校准完成,开始接收雷达数据");
- Serial.println("发送AT指令可配置参数,示例:AT+DELAY=20\r\n");
- Serial.println("----------------------------------------");
-
- // 上电自动配置示例(按需开启)
- // radarSerial.write("AT+DELAY=20\r\n"); // 离场延时20秒
- // radarSerial.write("AT+SENSE=3\r\n"); // 灵敏度最高3级
- }
-
- void loop() {
- // 1. 接收C4002上传的检测数据
- if (radarSerial.available() > 0) {
- char ch = radarSerial.read();
- if (ch == '\n') {
- // 一帧数据接收完成,解析打印
- parseRadarData(recBuffer);
- recBuffer = "";
- } else {
- recBuffer += ch;
- }
- }
-
- // 2. 电脑串口输入AT指令,转发给C4002
- if (Serial.available() > 0) {
- char cmd = Serial.read();
- radarSerial.write(cmd);
- }
-
- delay(30);
- }
-
- // 解析雷达返回数据帧
- void parseRadarData(String data) {
- Serial.print("[原始帧] ");
- Serial.println(data);
-
- // 判断人体存在状态
- if (data.indexOf("HUMAN=ON") != -1) {
- Serial.print("[状态] 检测到人体存在 ");
- } else if (data.indexOf("HUMAN=OFF") != -1) {
- Serial.print("[状态] 区域内无人 ");
- }
-
- // 提取微动能量值
- if (data.indexOf("ENERGY=") != -1) {
- int pos = data.indexOf("ENERGY=") + 7;
- String energyStr = data.substring(pos);
- Serial.print(" 微动能量值:");
- Serial.println(energyStr);
- } else {
- Serial.println("");
- }
- }
结合 C4002 毫米波传感器:有人常亮、无人 LED 闪烁
检测到人 LED 常亮;区域无人时 LED 持续闪烁提醒
- #include <SoftwareSerial.h>
-
- // 引脚定义
- #define RADAR_RX 10
- #define RADAR_TX 11
- #define LED_PIN 9
-
- SoftwareSerial radarSerial(RADAR_RX, RADAR_TX);
- String recBuffer = "";
- bool hasHuman = false;
-
- void setup() {
- Serial.begin(115200);
- radarSerial.begin(115200);
- pinMode(LED_PIN, OUTPUT);
- digitalWrite(LED_PIN, LOW);
-
- Serial.println("C4002人体检测+LED闪烁程序启动");
- delay(3000); // 雷达环境校准
- radarSerial.write("AT+DELAY=8\r\n");
- radarSerial.write("AT+SENSE=3\r\n");
- }
-
- void loop() {
- // 读取雷达数据
- while (radarSerial.available() > 0) {
- char ch = radarSerial.read();
- if (ch == '\n') {
- parseData(recBuffer);
- recBuffer = "";
- } else if (ch != '\r') {
- recBuffer += ch;
- }
- }
-
- // 逻辑:有人常亮,无人闪烁
- if (hasHuman) {
- digitalWrite(LED_PIN, HIGH);
- } else {
- digitalWrite(LED_PIN, HIGH);
- delay(200);
- digitalWrite(LED_PIN, LOW);
- delay(200);
- }
- }
-
- // 解析传感器数据,兼容两种输出格式
- void parseData(String data) {
- Serial.print("雷达数据:");
- Serial.println(data);
-
- if (data.indexOf("HUMAN=ON") != -1 || data == "1") {
- hasHuman = true;
- Serial.println("状态:有人 → LED常亮");
- } else if (data.indexOf("HUMAN=OFF") != -1 || data == "0") {
- hasHuman = false;
- Serial.println("状态:无人 → LED闪烁");
- }
- }
- #include <SoftwareSerial.h>
-
- // 引脚定义
- #define RADAR_RX 2
- #define RADAR_TX 3
- #define LED_PIN 9
- #define BEEP_PIN 8
-
- // 软串口对接雷达
- SoftwareSerial radarSerial(RADAR_RX, RADAR_TX);
- String recBuffer = "";
- bool isHuman = false;
- bool beepTrigger = false; // 进场只响一次标记
-
- void setup() {
- Serial.begin(115200);
- radarSerial.begin(115200);
-
- // IO初始化
- pinMode(LED_PIN, OUTPUT);
- pinMode(BEEP_PIN, OUTPUT);
- digitalWrite(LED_PIN, LOW);
- digitalWrite(BEEP_PIN, LOW);
-
- Serial.println("=== C4002 雷达+LED闪烁+蜂鸣器测试 ===");
- Serial.println("雷达环境校准3秒...");
- delay(3000);
- Serial.println("校准完成,开始检测!");
-
- // 雷达参数配置
- radarSerial.write("AT+DELAY=10\r\n"); // 离场10秒判定无人
- delay(300);
- radarSerial.write("AT+SENSE=3\r\n"); // 最高灵敏度
- }
-
- void loop() {
- // 接收雷达串口数据
- while (radarSerial.available() > 0) {
- char ch = radarSerial.read();
- if (ch == '\n') {
- parseRadarData(recBuffer);
- recBuffer = "";
- } else if (ch != '\r') {
- recBuffer += ch;
- }
- }
-
- // 电脑串口指令透传至雷达
- while (Serial.available() > 0) {
- char cmd = Serial.read();
- radarSerial.write(cmd);
- }
-
- // 有人逻辑:LED常亮,仅进场蜂鸣一次
- if (isHuman) {
- digitalWrite(LED_PIN, HIGH);
- if (!beepTrigger) {
- digitalWrite(BEEP_PIN, HIGH);
- delay(150);
- digitalWrite(BEEP_PIN, LOW);
- beepTrigger = true;
- }
- }
- // 无人逻辑:LED快速闪烁,蜂鸣关闭
- else {
- beepTrigger = false;
- digitalWrite(LED_PIN, HIGH);
- delay(200);
- digitalWrite(LED_PIN, LOW);
- delay(200);
- }
- }
-
- // 雷达数据解析,兼容数字0/1 和文本HUMAN=ON/OFF两种协议
- void parseRadarData(String data) {
- if (data.length() == 0) return;
- Serial.print("原始雷达数据:");
- Serial.println(data);
-
- if (data.indexOf("HUMAN=ON") != -1 || data == "1") {
- isHuman = true;
- Serial.println("状态:检测到人体,LED常亮");
- } else if (data.indexOf("HUMAN=OFF") != -1 || data == "0") {
- isHuman = false;
- Serial.println("状态:区域无人,LED闪烁");
- }
-
- // 打印微动能量值
- if (data.indexOf("ENERGY=") != -1) {
- int pos = data.indexOf("ENERGY=") + 7;
- Serial.print("微动能量:");
- Serial.println(data.substring(pos));
- }
- Serial.println("--------------------------------");
- }
五、测试问题汇总与解决方案测试遇到问题
| 问题原因
| 解决方案
|
远距离8m处检测灵敏度下降
| 远距离雷达信号衰减,微动识别精度降低
| 常规场景固定探测距离0-6m,超长距离场景调高传感器灵敏度参数
|
初始上电偶发短暂误报
| 上电未完成环境校准,底噪未清零
| 上电后执行自动环境校准,避免开机立即触发检测
|
无串口数据输出
| TX/RX接线反向、波特率不匹配或供电不足
| 核对串口接线,固定115200波特率,采用稳定5V供电
|
复杂遮挡环境检测不稳定
| 金属遮挡、墙体阻隔雷达信号
| 避开金属遮挡物,采用开放式安装,减少信号阻隔
|
六、试用总结与评价 6.1 产品优势- 检测能力全面:支持移动、微动、静止人体全状态检测,彻底解决传统传感器静止漏检难题,检测精度大幅提升;
- 抗干扰性极强:可过滤光线、温度、机械运动、电磁、小动物等无效干扰,误报率近乎为零,稳定性突出;
- 适配性广:参数可自定义配置,支持串口数据输出与AT指令调试,兼容各类主控设备,适配多场景智能化改造;
- 低功耗、高可靠:待机功耗低,72小时长期运行稳定,无异常故障,满足商用、家用长期使用需求;
- 上手门槛低:出厂预校准,无需复杂射频调试,即插即用,开发落地效率高。
6.2 不足与优化建议产品整体性能优异,仅超长距离(8m以上)微动检测灵敏度略有衰减,金属遮挡环境会影响探测效果;建议安装时规避金属遮挡区域,常规室内场景优先选用1-6m最优探测区间,可完全发挥产品性能。
6.3 整体结论C4002毫米波人体存在传感器相较于传统红外感应传感器,在检测精度、静态识别、抗干扰能力、环境适应性上具备压倒性优势,功能稳定、调试便捷、功耗可控,可完美适配智能家居、智慧办公、客流监测、智能节能等各类人体感知场景,具备极高的工程落地价值与市场实用性,可批量应用于各类智能化项目开发与改造。




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






