|
22200| 8
|
[已解决] SHARP 红外传感器测距原理 |
|
本帖最后由 Phoebe 于 2013-11-15 14:05 编辑 用了这么久SHARP的红外测距传感器,一直没关心过它的测距原理,惭愧。。{:3_49:}。今天终于了解了一下它是如何工作的,这里跟大家分享一下。看完以后瞬间豁然开朗,原来是这样。。。。{:3_41:} 工作原理 Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束 会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以 及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。 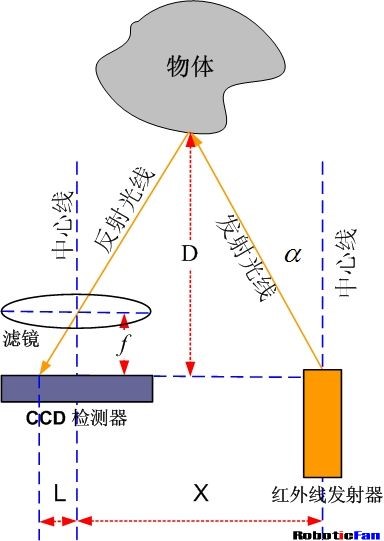 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。要 检测越是远的物体,CCD的分辨率要求就越高。 非线性输出 Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 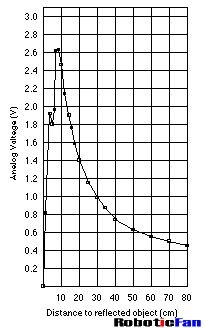 从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人 以全速移动,结果就是,"砰"的一声。当然了,解决这个方法也不是没有,这里有个小技巧。只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。如图所示: 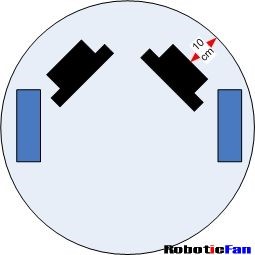 可以避免探测误差的安装图示 型号对比: 目前Sharp的红外线传感器有如下几种类型: GP2D02 (串口输出)探测范围 10cm-80cm GP2D05 (数字输出)探测范围 固定的24cm GP2D12 (模拟输出)探测范围 10cm-80cm GP2D15 (数字输出)探测范围 24cm GP2D120 (模拟输出)探测范围 4cm-30cm GP2YOAO2YK (模拟输出)探测范围 20cm-150cm GP2Y0D02YK (数字输出)探测范围 80cm 所有的模拟输出,其输出电压和距离成反比,数字输出只能检测在范围内物体是存在还是不存在,而不能提供距离的检测。 希望对大家有帮助啊{:2_31:} |
|
形象生动,不错! 如果再能补充一些技术细节就好了,比如说:测量数据刷新率,数据偏差等。 很早在老外的网站(www.acroname.com) 上看到一篇类似题材的文章,下载保存了,在此与大家分享(见附件) 亏得保存了,现在找不到原文的链接了。 |

Sharp GP2D12 applicationNote.rar
120.58 KB, 下载次数: 9401
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






