|
10299| 0
|
[Arduino技术课程(高中)] 第十四课 火焰报警灭火模型实验 |
|
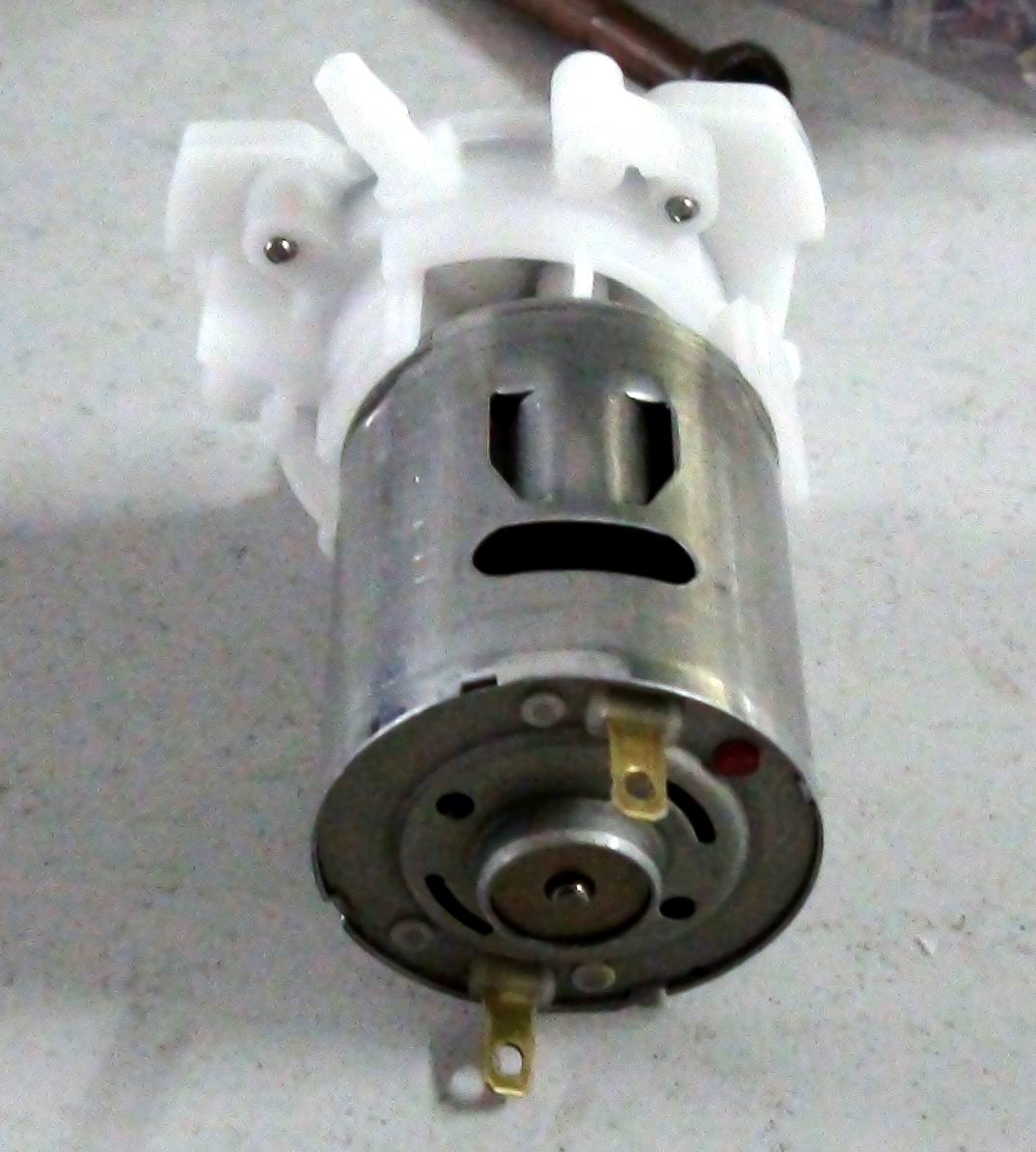
本帖最后由 hnyzcj 于 2014-5-17 16:47 编辑 火焰报警灭火模型实验 作者:陈杰 教学目标 知识与技能: 1. 使用火焰传感器、蜂鸣器、红色LED、微型自吸直流小水泵制作火焰报警灭火系统模型。 2. 掌握如何电机驱动板与水泵正确的物理连线。 3. 使用电机驱动板的驱动水泵进行工作。 过程与方法: 1. 创意制作,正确连接物理电路,制作模型。 2. 测试程序,查看实验结果。 情感态度价值观: 构建实际模型,联系生活普及应用。 教学重点: 了解并掌握电机驱动板的结构及电气特性,了解其IO口,为灭火装置的提供动力驱动模块。 教学难点: 正确叠加Arduino主控板与电机驱动板,使用其IO口完成系统功能。 实验器材: Arduino主控板、L298P电机驱动板、微型自吸直流小水泵、火焰传感器、蜂鸣器、红色LED、220欧电阻、10K欧电阻、面包板、导线若干、Arduino Ide 1.04 【教学过程】 1.情景引入 上一课我们已经给大家介绍了火焰声光报警模型,但是在上节课我们留给同学们一个问题:虽然火焰报警模型通过声音、光线提示报警,但并没有对火源产生任何影响,请同学们考虑,如果检测到火源我们可以采取什么措施呢? 生1:发现火源后,可以用风来吹灭。 生2:发现火源后,可以用水来浇灭。 …… 师:同学们讲的都很好,方法有很多,那么这节课呢,我给大家来介绍用水泵喷洒来灭火。下图就是一台直流自吸式水泵 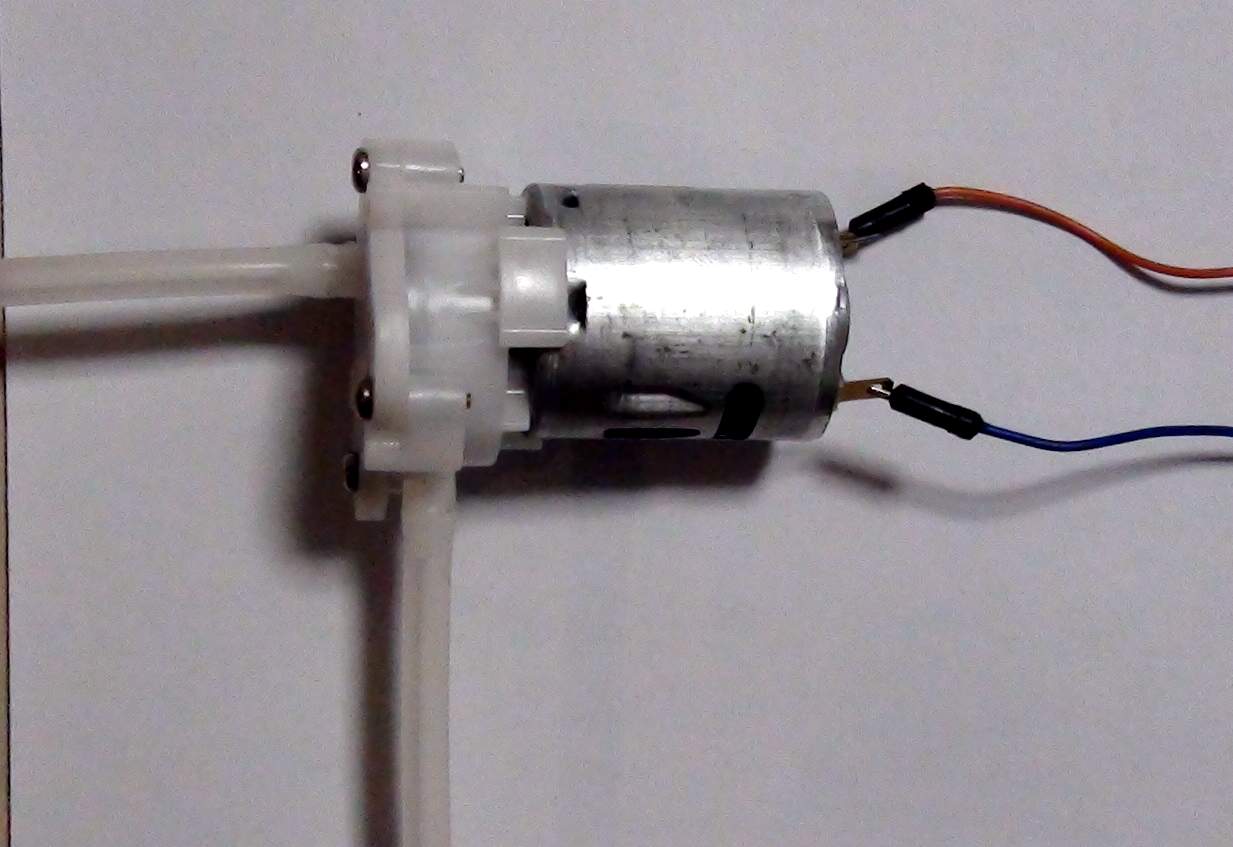 图1 本课所需器材为:Arduino主控板、L298P电机驱动板、微型自吸直流小水泵、火焰传感器、蜂鸣器、红色LED、220欧电阻、10K欧电阻、面包板、导线若干 设计意图:案例引入,器材准备。 2.新知讲授 对于今天的模型中所使用到的器材,只有水泵和电机驱动板是新东西,其他的器件都和上节课完全一样,这里不在重复介绍。先来看看电机驱动板吧 (1.)认识L298P电机驱动板 本次实验中所使用的电机驱动板型号为:ocrobot motor shield 是基于arduino motor shield设计的增强版本的电机驱动,在兼容原版的基础上,重新设计了所有电路,光电隔离了与arduino通讯的所有的数字IO,电机板采用独立供电,GND分离技术,充分保证了在大负载,大功率下,急刹车,瞬时正反转等恶劣电磁环境下的arduino稳定性。其相关电气指标如下所示。 最大输入电压:24V 最小驱动电压:3V 推荐驱动电压范围:5v-12v 最大电流:2A 可靠工作电压(无辅助散热):12V 可靠工作电流(无辅助散热):1A 特点:六路光耦信号隔离,与Arduino控制器无GND连接,整版全隔离,独立电源系统。 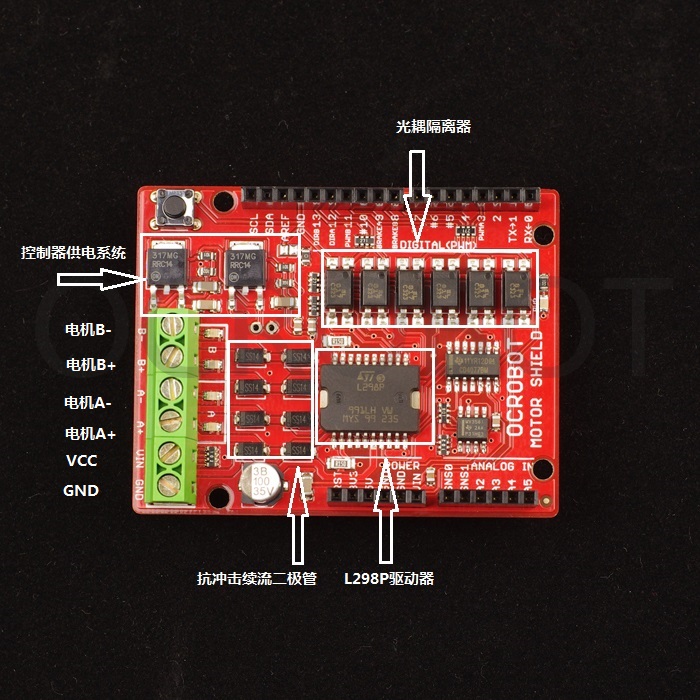 图2使用注意:使用电机驱动应保证电机驱动板与arduino控制板电源完全独立,使用两块电池或者两个独立的电源,保证其电气隔离性。整体设计保留原版的IO口位置设计,兼容性得到保证,一样的堆叠设计,可以简单的插入arduino板上使用使用非常方便,只要将电机与电源依照下表标示,接入系统。下表为IO口的控制功能,如果使用电机时还会接驳其他设备应避免占用以下IO口。
 (3.)连接线路 此次实验由于使用到了电机驱动板,所以在连线之前需要进行板卡叠加,将电机驱动板叠加在主控板之上。如下图所示,由于本次主控板是老板,所以出现了2根引脚不能紧密结合的情况,不过不影响使用。 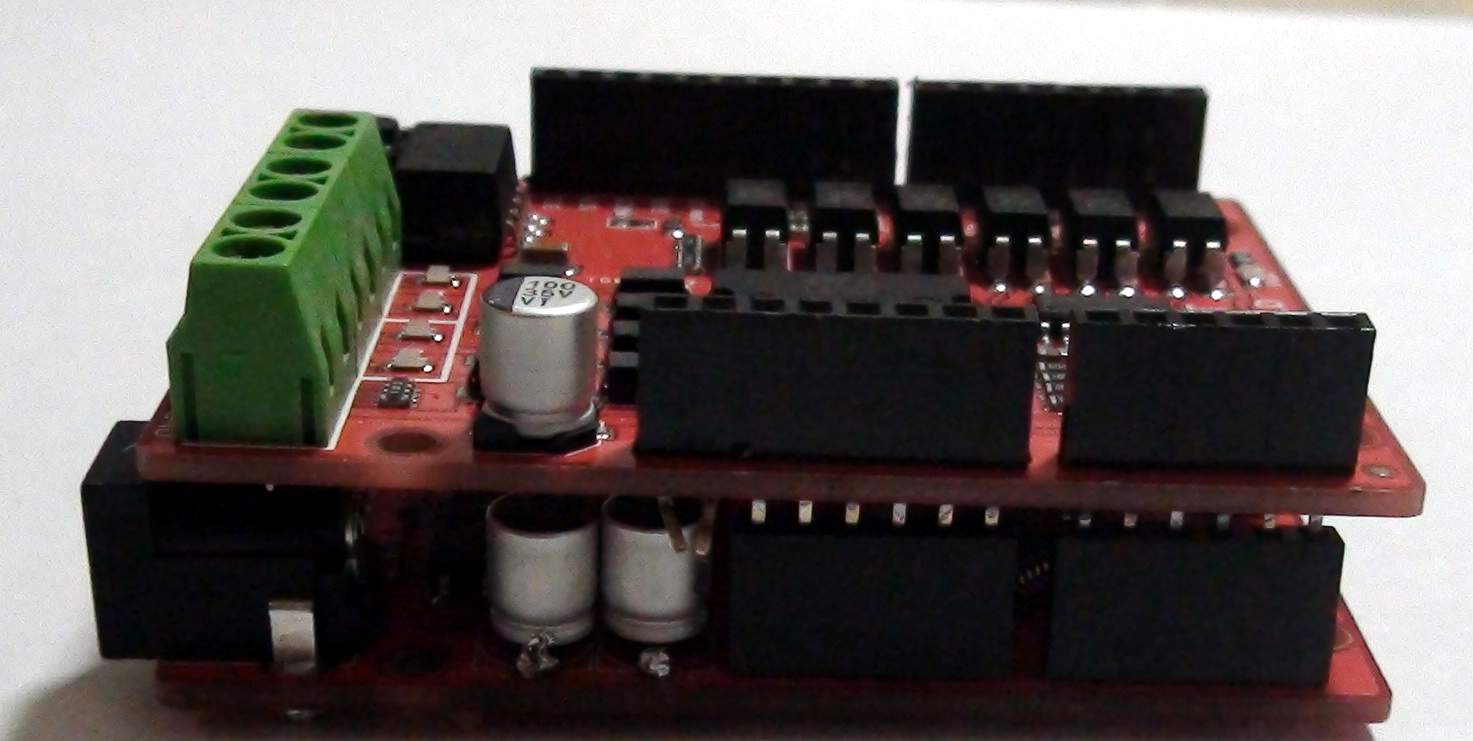 实验的电路中蜂鸣器、红色LED、火焰传感器的连接大家上课已经学习过了,这里不再重复,主要讲下电机与电机驱动板的连接,将水泵电机的正负引脚分别通过杜邦线与电机驱动板的电机A或B的正负极相连。电机驱动板的VCC、GND分别接电源的正负极。  图3设计意图:介绍Arduino物理电路连接,为后面正确实验效果奠定基础。 (5.)烧录程序程序代码如下: int g;//定义发量g void buzzer()//蜂鸣器发出“嘀”声音子程序 { for(g=0;g<80;g++) { digitalWrite(11,HIGH);//发声音 delay(1);//延时1ms digitalWrite(11,LOW);//不发声音 delay(1);//延时ms } } void setup() { pinMode(10,OUTPUT);//设置数字10、11引脚为输出方式 pinMode(11,OUTPUT); } void loop() { char i,j,k;//定义发量 i=analogRead(4);//读取没有火焰时模拟口的电压值 while(1) { j=analogRead(4);//不断读取模拟口的电压值,时时监测 k=j-i;//做差值 if(k>123)//如果差值大于0.6(0.6为模拟值,123为对应的数字二进制值)说明有火焰 { buzzer();//蜂鸣器发出声音 digitalWrite(10,HIGH); //设置数字10口为高电平,红灯亮 digitalWrite(9,LOW); //松开电机A的制动 digitalWrite(3,HIGH); //采用全功率输出 digitalWrite(12,HIGH); //设置方向为正向 } else { digitalWrite(11,LOW);//设置数字11口为低电平,蜂鸣器不响 digitalWrite(10,LOW); //设置数字11口为低电平,红灯灭 digitalWrite(9, HIGH); //松开电机A的制动 digitalWrite(3,LOW); //采用全功率输出 digitalWrite(12,LOW); //设置方向为正向 } } }将上述代码复制到IDE窗口中,先编译,如果无误后,再上传烧录至控制板中。完成后可以测试实验结果。 三.课堂练习师:1.水泵的电机反接,看看效果是什么样的?为什么?。2.将灭火的水泵换成,吹风的风扇,比较一下那个灭火装置效率更高? 四.学习总结 本课主要学习了电机驱动板的结构和电气特性。以及如何利用电机驱动板驱动自吸式水泵。并利用上节课所制作的火焰报警装置,检测到火源,进行灭火的动作。 五、课后反馈本课教学后出现的问题还是比较多的具体如下:1. 学生在使用的LED、蜂鸣器等电器元件的数字IO占用了电机驱动的IO2. 火焰传感器的连线错误(老错误)。3. 电机驱动板没有提供单独供电或电源接线接反。4. 水泵连线接反,没有起到抽水灭火的效果。综上所述错误原因分析:对于电机驱动板和水泵新设备熟练程度不够,需加强练习。 。 |



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






