|
20694| 6
|
[求助] Romeo V2 控制步进电机 |
|
原文作者:小乔帮主Angelo 原载于:DFRobot 我们可以直接使用Arduino的库让Romeo控制直流电机。但是如果没有编码器,就无法精确的控制直流电机。而步进电机很好的解决了这个问题,但是遗憾的是Arduino的步进电机的库在Romeo上并不兼容。最近我改进了这个库,让它不仅可以控制速度,同时还可以控制步进电机的力矩, 这样你就不用再买一个步进电机控制器了。 在测试这个库时,我发现,由于用analogWrite函数生成的PWM波的频率太小了,很容易使步进电机失步。为了解决这个问题,我改变了计时器的分频模式这决定了这个库只适用于Romeo V2或以上版本。但如果你熟悉AVR单片机,你也可以对他进行修改。 通常每个步进电机需要四根线连接,但实际上由于两根线上的电压始终是反向的,可以使用两根线代替,而另外的两根线则可以用来控制电机的力矩. 这个库非常好用: 1. 建立一个类的实体: 第一个变量是电机旋转一圈的步数. 其他的则是在Romeo上的输出管教 2.设置步进电机的速度,单位为"转/分钟": 200转/分钟对于这个电机来说相对较大,如果再大的话可能使力矩变小,导致失步 3.设置步进电机的力矩: 170是这个电机的默认值. 可以设置成100到180,这两个极限值可以在.h文件中自己定义,使得力矩处在一个比较合理的范围内. 如果你使用的是其他的电机, 你可以自己定义它. 4.运转电机: 电机会向前走1000步,然后停止,之后反转1000步. 注意当电机停止时,电机还在工作,线圈里面的电流会达到最大值,因此在这种情况下我们减小了pwm波的占空比,以防损害电机.你也可以自己在.h文件中修改. 硬件列表: 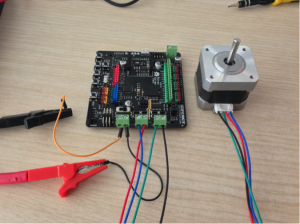 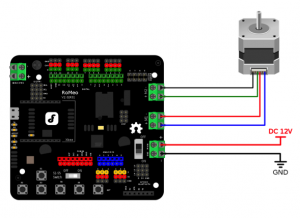 代码: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 ARD DAY
ARD DAY






