|
12116| 6
|
[OverLord] Overlord 维修保养の【安装减震片篇】 |

|
本帖最后由 dsweiliang 于 2017-1-19 13:31 编辑 降低步进电机振动、噪音的解决方法 以下先引用http://www.dgxue.com/bujindianji/shiyongwenti/4171.html的部分说明,后部分才是本文的重点。 与驱动电路有关的方法 步进电机的振动噪音由驱动电路引起的原因如下:
其中(1)的高次谐波为主要原因。步进电机使用方波电流驱动,必然含有大量的高次谐波,由此产生振动和噪音。因此驱动电流最好为正弦波。接近正弦波的驱动方法有步进电机的细分步进驱动。下图为电机1/4细分、半步、整步驱动的振动比较,其振动为依次增加的。  步进电机的振动噪音由步进电机本体引起的原因如下:
除此之外,还要考虑以下原因:
上述中,与电机有关的降低振动和噪音效果好的方法如下: 提高定子的刚度两相56mmHB型步进电机(1.8°)的结构如下图所示: 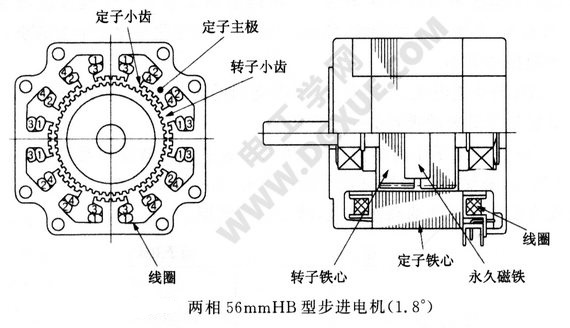 转子直径减小约10%,定子壳体增加10%,提高定子的刚性后与原设计相比,其振动噪音如下图所示得以改善。 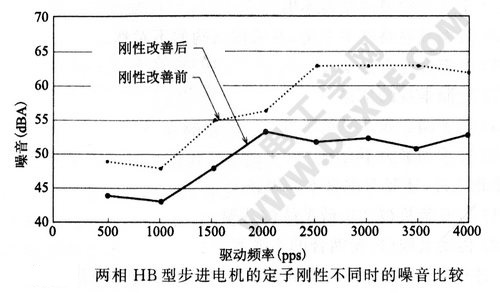 步进电机产生噪音的原因,主要有高次谐波产生的电磁力,定子刚度不够,定子主极对转子产生的吸引力,引起定子的微小变形等。 定子的多主极定子刚度与噪音之间的关系如上图所示,定子主极吸引转子才使定子发生微小变形,也为产生噪音的原因。如上(两相56mmHB型步进电机结构图)所示,两相HB型有8个主极。两相时定子主极数为4、8、16,三相时主极数为3、6、9、12等。一般主极数越多,低速转矩越低,高速响应能力越好,线圈越小,振动噪音越得以改善。 下面以伺服步进电机(VR型的步进电机)为例,介绍降低振动、噪音的方法。定子的主极数为三相6极或三相12极,分析径向引起的振动,可以得到降低噪音的解决方法,可以看到6极有6个地方磁场变化,12极有12个地方磁场变化,然而12个极处的变化量比6个极的小,所以产生的振动就小。 HB型步进电机,主极越多,线圈绕制的时间越长,费用越高,但主极的增加是降低振动噪音的一种手段。 微调定子小齿结构降低激磁磁通中高次谐波的有效手段,如如下图所示,是使转子齿相对定子齿的节距为不等距角δ1、δ2等,通过不同角度方法降低磁通的高次谐波,减小齿槽转矩。 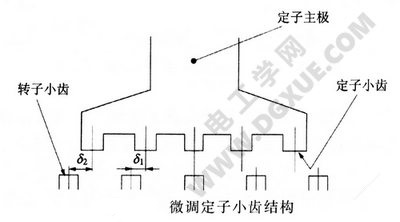 两相电机时,齿槽转矩由四次谐波构成,设计时主要考虑消除四次谐波。定子与转子齿距进行微小变化,使部分交链磁通减小,距角特性的峰值转矩减小。目前,销售的两相步进电机,除特殊用于制动等方面,一般均采用微调节距或改变形状构造,减小齿槽转矩。 下图为两相步进电机的例子,齿槽转矩使距角特性产生畸变。两相电机的齿槽转矩为距角特性周期的1/4,即变成四次谐波。定子电流与永久磁铁转子磁通的距角特性的理论值为虚线所示的正弦波,此曲线叠加上齿槽转矩产生的四次谐波,合成为粗线描述的畸变转矩曲线,距角特性畸变,则成为非正弦波,引起位置定位精度变差,振动和噪音变大。齿槽转矩的相位由定子与转子齿相对位置关系决定,定子与转子齿的微小位置偏移,使各齿产生的四次谐波的相位发生微小变化,起到互相抵消的作用,从而减小齿槽转矩。 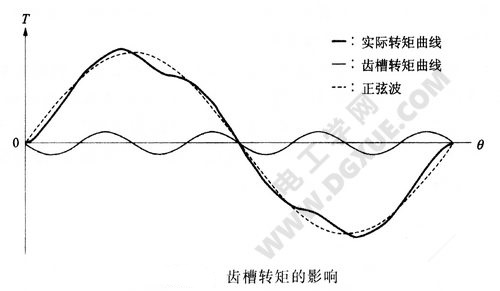 上图(微调定子小齿结构)所示的微调方式,定子与转子齿的齿形及相位角δ的偏移量,是各个电机生产厂家重点研究的地方。日本伺服公司对有无微调的电机特性进行了以下比较。 下图表示两相步距角1.8°的步进电机在有和没有微调情况下的细分驱动时的速度-振动特性。无微调电机细分驱动时,如虚线所示,低速区域或中速区域可看到振动的峰值,而使用微调方式,可消除其中大部分的振动。 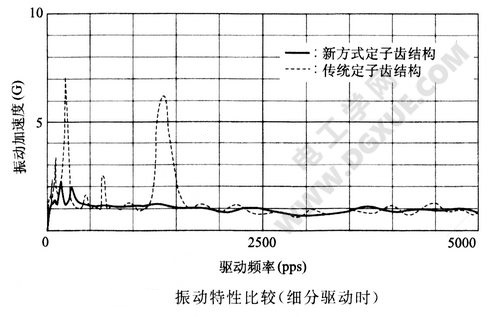 其次,比较这两个电机在两相激磁驱动方式下的速度-噪声特性,如下图所示。比较看出,使用微调偏移方式的噪音得到大幅改善。电机速度越快,噪音的降低效果越明显。 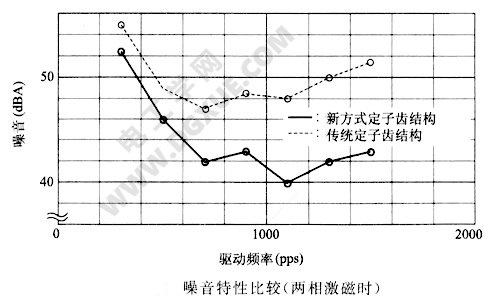 对三相HB型步进电机进行比较,下图为有无采用微调偏移方法的特性曲线。此图中,上图为三相HB型1.2°、6主极,无微调偏移的齿槽转矩;下图为三相HB型1.2°、12主极,有微调偏移的齿槽转矩。三相HB型步进电机,同一步距角的电机的齿槽转矩比较,定子极数多,微调偏移效果好,12主极1.2°的产品齿槽转矩减小17.4%。 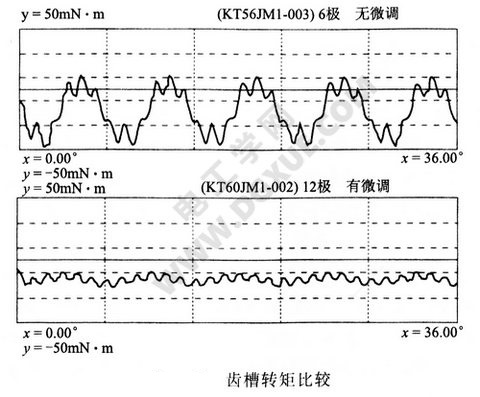 然而以上说那么多,都没有什么卵用 因为无论是修改驱动电路还改变电机结构,对我们来说都是无能为力,这些交给大师他们解决了,但是并不是什么都做不了,我们还可以: 安装减震器降低噪音 百度并没有对步进电机减震器的说明,那引用一下商家的说明 步进电机在低速运行区间发生共振的几率会比较高,当步进电机运行在共振速度区间即使利用细分驱动也很难避免振动和噪声的发生,对于对振动和噪声要求比较高的客户来说,这样的振动和噪声是不可接受的。步进电机专用减震垫可以低成本地减轻振动和噪声的影响,利用两块五金安装板之间的橡胶的缓冲作用来改善振动和噪声效果。42减震垫厚度6mm,橡胶硬度一般有45°和60°两种,可以根据实际情况选用,一般重量较轻的步进电机选用45°的减震垫。 下面就是我们的主角: 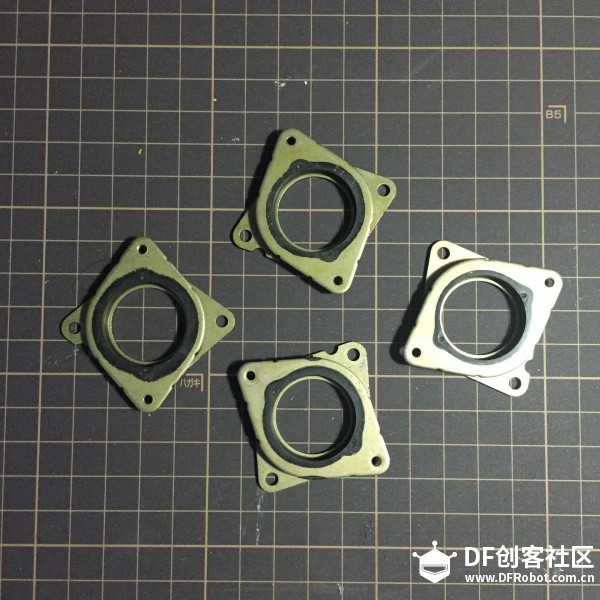 安装前测试一下打印的噪音分贝,和安装后好做一个对比,测量分贝采用一段时间的平均值 安装减震片前机器的噪音分贝如下图: 最大95,平均82  首先把机器翻过来,露出机器的菊花 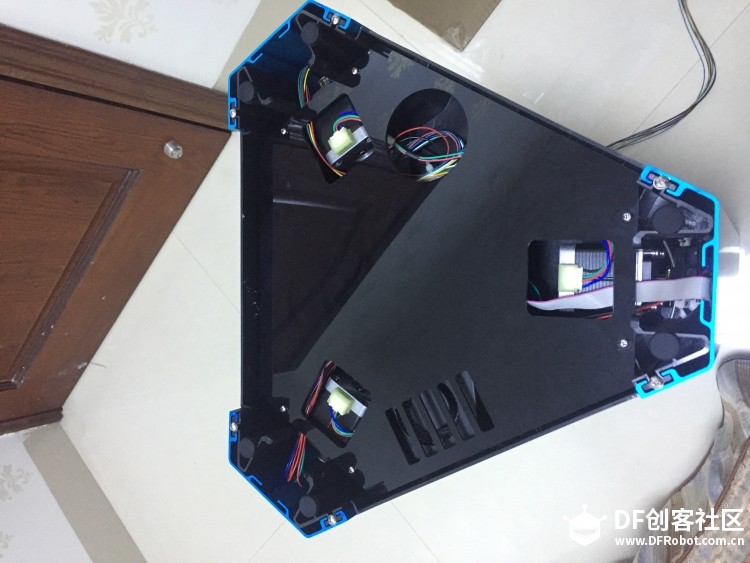 两三下手势把菊花保护板脱下,露出机器的核心  但是我们今天的重点不是攻击菊花的核心,而是三只脚上的电机 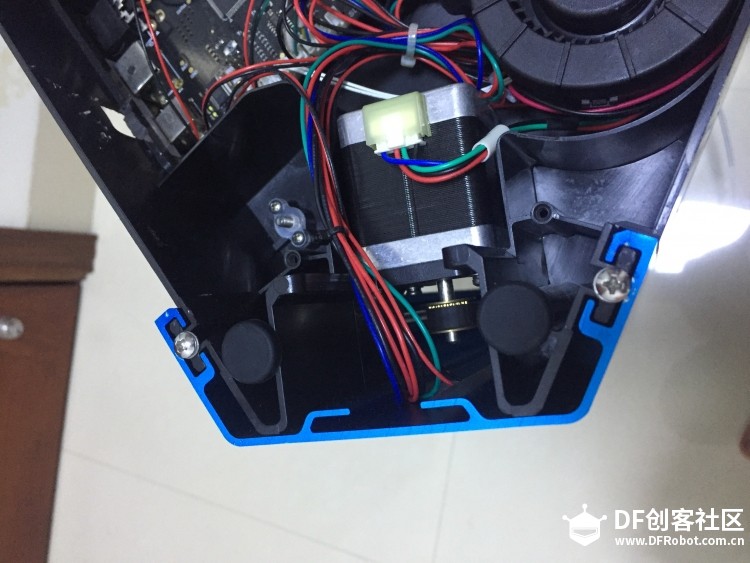 把压线的亚克力宝剑条抽出 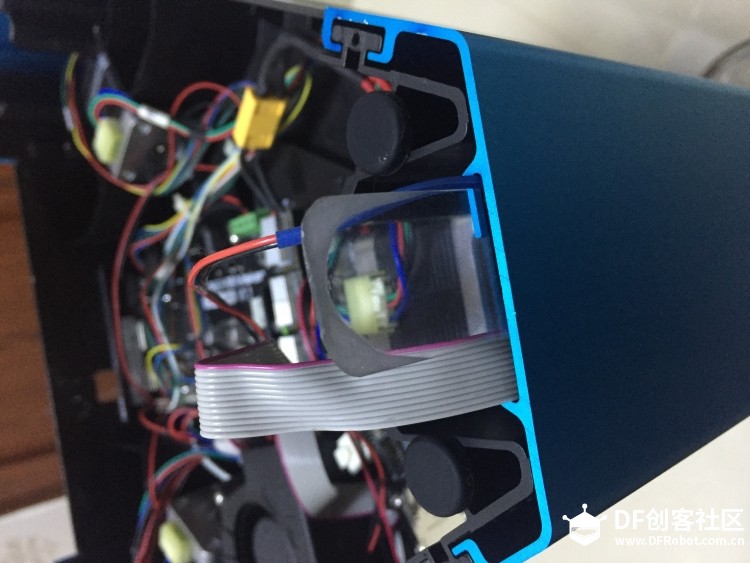 拆下外壳,卸下皮带,我们今天的主角展露头角,不用我说啦,把电机拆下来 试装一下,孔位准确,大丈夫没问题 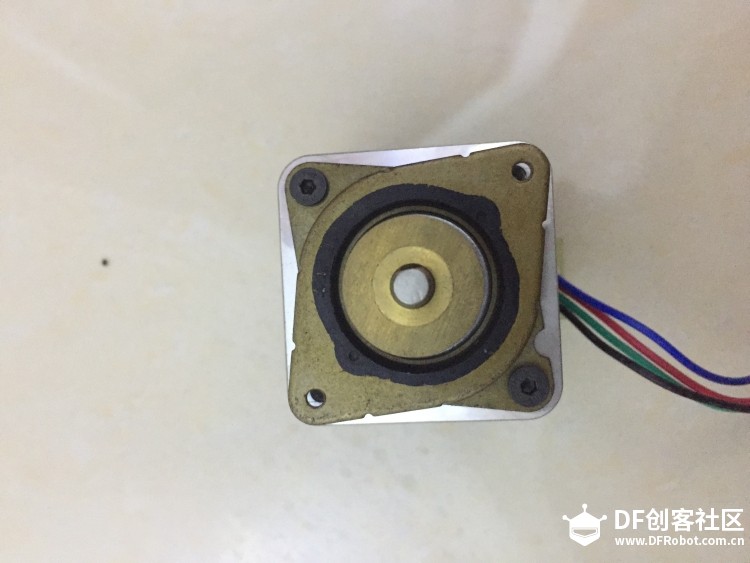 然而装回去发现,因为减震片的厚度,电机往内移了一点,皮带装不回去啊  这必须要把同步带轮往外移才能对齐皮带,这个需要工具才能处理,祭出我们的拉马 没错,这货真的叫拉马  看样子大家都懂得怎么用了是不是,那就不详细说明了(其实是不小心把照片删掉了) 把同步轮拉到和轴差不多齐平  然后把电机装回去,只能装两个螺丝,别傻傻的想办法把四个螺丝都装回去啊,反而这样子会把减震片锁死失效  原路把机器装好,那我继续不详细说明了(其实也不小心把照片删掉了,注意备份) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定






