|
101781| 56
|
[入门教程] Arduino教程15--红外遥控数码管「DFR0100 」 |
|
【本篇课程内容于 2024年11月14日更新】 >本系教程配套硬件套件:【新版】Arduino入门套件 DFR0100 数码管,常见的用来显示数字的,像计算器屏幕上显示的数字就是一种数码管。在本项目之前我们先来了解一下数码管是如何工作的。数码管,其实也算是LED中的一种。数码管的每一段,都是一个独立的LED,通过数字引脚来控制相应段的亮灭就能达到显示数字的效果。现在,让我们通过完成项目的方式来感受一下数码管的神奇之处吧! 元件清单  硬件连接 按下图连线图连接,注意数码管各段所对应的引脚。下边引脚说明图上为什么画这么几个箭头呢?个人觉得,这样看起来更方便。可以给你作为参考。我们从上面一排看,红色箭头的方向,从右往左,b → a → f → g的顺序正好对应,下面红色箭头逆时针顺序b → a → f → g。蓝色箭头也是表达的同样的意思。 我还特意在连线图上,对数码管所连接的引脚做了标示。这样就能更清楚的知道哪个引脚控制哪一段了。这8个电阻同样是起限流的作用。红外接收模块连线如图所示,如果有不清楚的地方请参考项目【红外遥控灯】。 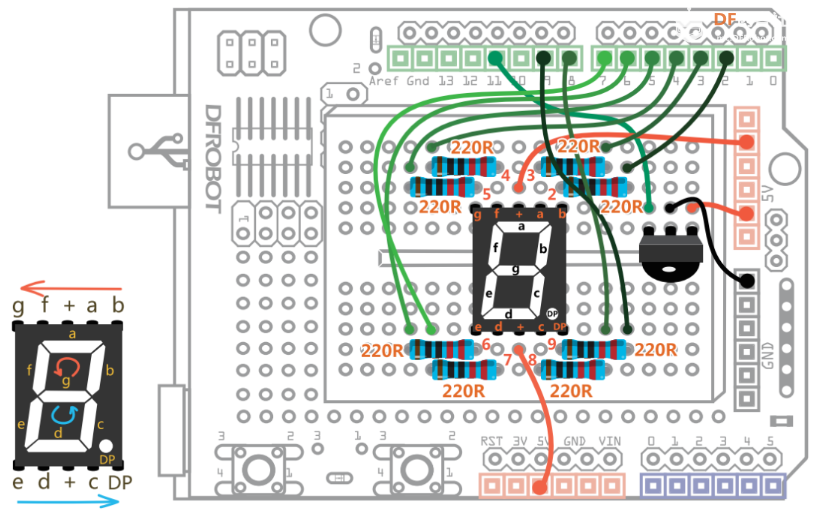 图 1 红外遥控数码管连线图 示例代码_1 样例代码1: 完成下载后,数码管就会循环显示0~9的数字。由于要看懂代码的话,首先需要了解数码管的构造,所以我们这回先说硬件部分。 硬件回顾 数码管其实就是一个前面介绍的LED的组合体,这个组合体包含8个LED,所以也称之为八段数码管。说白了就八个灯。哪八段?不用多说了吧!a到g以及小数点DP。其实用法和前面说的LED也是一样的,每段都是一个发光二极管,分别用8个数字口来控制它们的亮灭,通过不同段的显示,就能组成0~9的数字。比如,我们让b,a,f,e,d,c亮起的话,就能显示一个数字“0”了。 下面图2是个引脚说明图,不陌生了吧!在前面硬件连接的时候,已经看到过一次了。 这里,b → a → f → g → e → d → c → DP分别连接到Arduino数字引脚2~9。 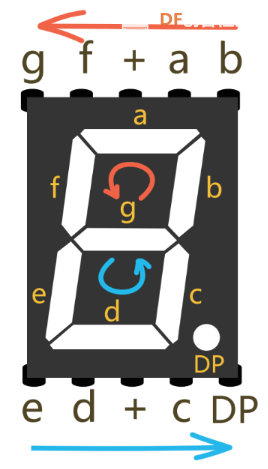 图 2 引脚连接说明图 数码管一共有10个引脚。a~DP 这8个引脚接到数字口,那还有两个引脚呢?另外两个引脚是公共端,LED只有一端是不能被点亮的。我们在项目【炫彩LED】中讲到过共阴共阳的问题,数码管也存在共阴共阳问题。所谓共阳就是公共端接+5V,共阴则是公共端接GND。 共阴共阳只是在代码上要稍作修改。我们这里选用的是共阳数码管。现在你对硬件有所了解了,我们来看看软件部分。 数码管的共阴共阳在使用上有什么区别? 共阳数码管,它们公共端接5V,那在代码中,控制另一端的数字引脚为LOW,这样才能让数码管点亮。如果是共阴数码管,公共端接GND,在代码中,控制另一端数字引脚为HIGH,才让数码管点亮。 代码回顾_1 硬件部分我们已经说过,数码管需要接到8个数字引脚,所以在一开始,需要定义8个数字引脚作为输出。这次我们用一个for循环来完成这8个数字引脚的设置。数码管b,a,f,g,e,d,c,DP分别和Arduino数字引脚2~9对应。 从引脚2开始,一直循环到引脚9,都设为OUTPUT模式,初始化为HIGH。前面说过,共阳的话,设置HIGH,不被点亮,所以开始先不点亮数码管。(当 然,你一个一个引脚分开设置输出模式也是不会错的,只是会让代码显得很冗长) 好了,到了主函数,要分别显示0~9的数字。是不是觉得代码大部分都是相似的。所以,我们只要看明白如何显示数字0,那整段代码就都迎刃而解了。 int n0[8]={0,0,0,1,0,0,0,1}; 这里我们要引入一个数组的概念。数组是一个变量的集合,可以通过索引号来找到数组中的元素。在我们的程序中,声明了一个int型的数组。并取名为n0。之后用8个数值来初始化这个数组。那如何获得数组中的元素呢?你只需要简单的指出这个元素的索引号。数组是从0开始索引的,这意味着数组中的第一个元素的索引号为0而不是1,因此数组中的8个元素的索引号是0~7。在这里元素4,对应索引号为3(n0[3]),值为1。元素8(索引号7,n0[7])的值为1。 声明中n0[8]的方括号中的8代表有8个元素。 定义完数组后,进入又一个for循环。 这个for循环是给2~9引脚写入状态值,也就是HIGH还是LOW,digitalWrite()函数中写入HIGH的另一种形式就是写入“1”,LOW则可以写为“0”。我们通过数组索引的方式给2~9引脚赋值。 比如当pin=2,代入n0[pin-2]中,对应为n0[0],n0[0]意思是获得数组的第一个元素,为0。完成了引脚2置低(LOW)。我们前面说了,共阳的数码管,置低(LOW)的话,是被点亮,所以,b端被点亮了。循环到pin=3,a段被点亮。循环到pin=4,f段被点亮,依次类推……。 整个循环过程如下: pin=2 → n0[0] =0 → digitalWrite(2,0) → b段点亮 pin=3 → n0[1] =0 → digitalWrite(3,0) → a段点亮 pin=4 → n0[2] =0 → digitalWrite(4,0) → f 段点亮 pin=5 → n0[3] =1 → digitalWrite(5,1) → g段不点亮 pin=6 → n0[4] =0 → digitalWrite(6,0) → e段点亮 pin=7 → n0[5] =0 → digitalWrite(7,0) → d段点亮 pin=8 → n0[6] =0 → digitalWrite(8,0) → c段点亮 pin=9 → n0[7] =1 → digitalWrite(9,1) → DP段不点亮 这样就完成了显示数字“0”了。同样用数组的方法显示数字1~9。自己动手画一下,哪几段亮,哪几段不亮就一目了然了。 如果样例代码1弄明白后,我们要教大家一种更简单的方法,继续看下方的样例代码2。 示例代码_2 我们这里要教大家实现这个数码管0~9循环的代码另一种写法,上面我们说到了数组,通过创建10个数组用于显示0~9。这里同样也还是用数组写,区别在于代码1中其实准确的说应该叫一维数组,我们这里用到二维数据。这样一来,可以让代码看起来更简洁。动手输一下下面这段代码吧,看看是不是同样的效果! 样例代码2: 代码回顾_2 对比一下样例代码1,能发现明显的区别在哪里了吗?代码1中,我们创建了10个一维数组,代码2只需要创建一个二维数组就全部搞定了。不要被什么一维、二维数组的名字给吓唬到,其实用法一样的。 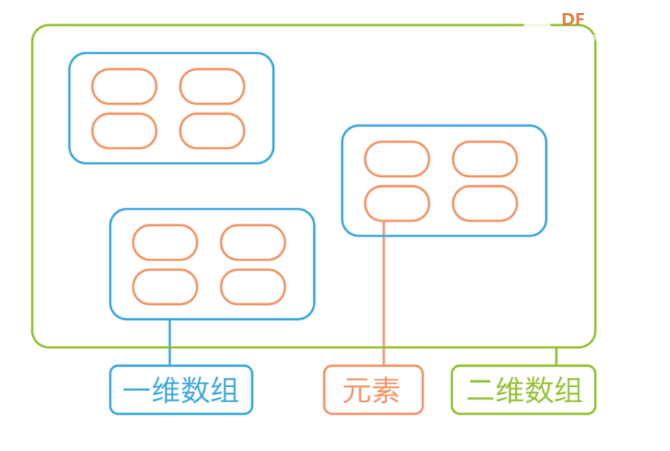 通过上面这个图,元素、一维数组、二维数组之间的关系就一目了然了。一维数组由元素组成,而二维数组则是由一个个一维数组组成的,关系就是那么简单。 样例代码1中,分别用10个数组,每个数组有8个元素,每个元素依次对应到数码管b~DP引脚状态值,这样就能在数码管上反映为0~9的数字显示。 而我们现在则是把前面散开的10个一维数组整合到一起,变为一个二维数组。同样通过索引的方式来找到这些元素。但还是不要忘了索引号也是从0开始的!前面的方括号写入的只是元素个数。 看一下代码: 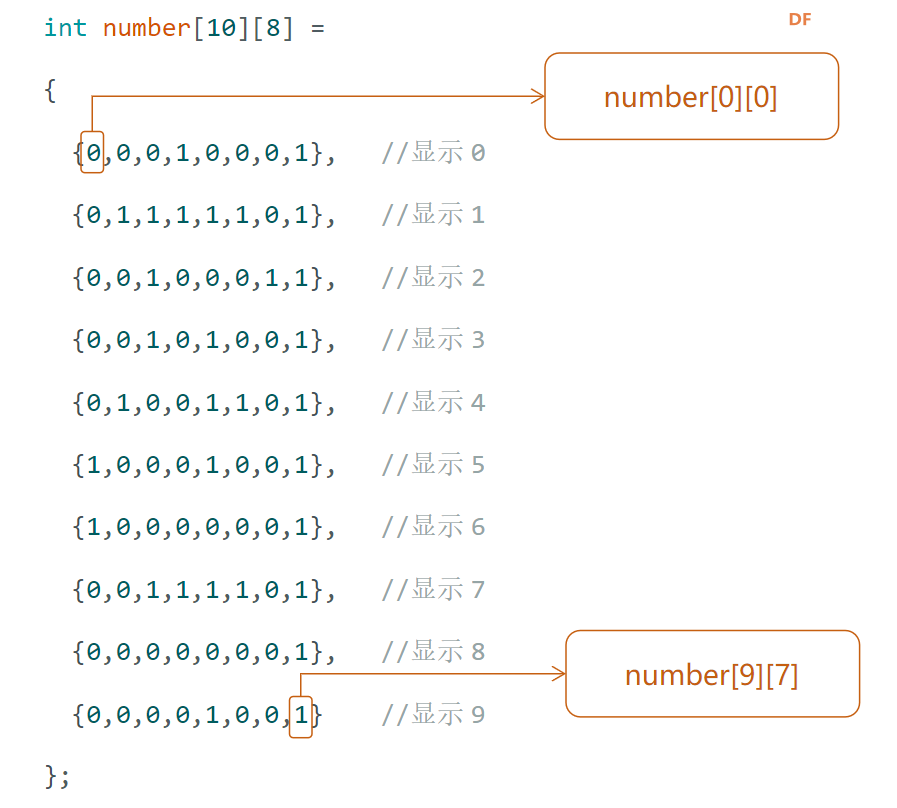 这就是一个二维数组。索引号从0开始,如果让你找number[0][0],能找到是哪个数吗?就是二维数组中第1行的第1个数,为0。number[9][7]也就是第10行的第8个数,为1。 上面这两段代码我们整合在一起看,loop()主函数中,for循环让变量j在0~9循环,j每赋一次值,numberShow()函数就要运行一次。 numberShow()函数整个运行过程如下:程序一开始j=0,numberShow(j)为numberShow(0),跳回到上面的numberShow()函数,i现在的值就为0了,pin初始值为2,所以digitalWrite()现在值为digitalWrite(2, number[0][0]),回到数组number[10][8]中找到number[0][0]对应的值,为0。此时,digitalWrite(2,0),代表引脚2被置LOW,引脚2 对应的b段点亮(共阳数码管置LOW才被点亮)。之后再是循环pin=3,pin=4,……,一直到pin=9整个for循环才结束,也代表数组的第一行的8个元素全被运行了一遍,最终显示一个数字“0”。 回顾一下样例代码1是如何显示一个数字“0”的: 原理是一样的,通过给引脚2~9循环赋值,控制数码管b~DP段亮灭,就能显示出一个我们想要的数字。numberShow(0)循环完后,再次回到loop()中的for函数: j=1→ numberShow(1)→ i =1 → number[1][pin-2] → 显示数字1 j=2 → numberShow(2) → i=2 → number[2][pin-2] → 显示数字2 j=3 → numberShow(3) → i=3 → number[3][pin-2] → 显示数字3 …… j=9 → numberShow(9) → i=9 → number[9][pin-2] → 显示数字9 好了,这就是整段代码的分析过程,好好体会一下一维数组和二维数组的区别,以及整段代码如何巧妙运行的。了解了数码管和红外接收管各自的工作原理后,我们需要把这两者结合起来,看看红外接收管和数码管结合能迸发出怎样的火花呢?想到了吗?遥控数码管!Arduino控制器把红外接收管从Mini遥控器那儿接到的信号,经处理传达给数码管。让Mini遥控器上0~9对应在数码管上显示0~9,除此之外,还有递减,递增的功能。 示例代码_3 样例代码3: 上传完代码后,尝试按下图3指出部分的按键,看看是数码管是个怎样的变化。  图 3 遥控器按键说明 代码回顾_3 程序一开始还是对红外接收管的一些常规定义,按项目【红外遥控灯】搬过来即可(注意:IRremote库选择2.6.0版本)。 在这里,我们多定义了一个变量currentNumber,通过名字应该就可以看出来含义了吧。这个变量的作用是,用来存储当前的数字,数字递增递减时能找到对应的参照点。 同样用数组的方式来存放这些红外码,0x-表示是16进制。long是变量的类型,如果你还想用遥控器上的其他按键来控制做一些其他事情的话,把红外码替换掉就好了。 紧接着是,一个二维数组number[10][8]的定义。我们在代码回顾_2已有说明了,通过调用数组的元素,把这些元素的值依次赋给数码管显示段的控制引脚,并在numberShow()函数中得以实现数码管数字显示。setup()函数中,仍然是波特率设置,启动红外解码,数字引脚模式设置等常规设置。 到了主函数loop(),一开始还是先判断是否接收到红外码,并把接收到的数据存储在变量results中。 if (irrecv.decode(&results)) 一旦接收到数据后,程序就要做两件事。第一件事,判断是哪个红外码,也就能对应找到是哪个按键按下的。第二件事,找到对应按键后,让数码管干什么事?让我们接着看看程序是如何完成这两件事的。 第一件事: 会有三种情况需要判断,第一种情况,按遥控器0~9时,数码管显示数字0~9。第二种情况,每按下后退键,数字在原有基础上递减一位,直到减到0为止。第三种情况,每按下前进键,数字在原有基础上增一位,直到增到9为止。 对这三种情况进行判断,这里呢,同样用到了if语句,与以往有所不同的,我们选择用 if…else if。if…else和if…else if的区别在哪儿?区别在于else if后面需要接判断表达式,else不需要判断表达式。然而,不管是else还是else if都是依附于if语句存在的,不能独立使用。 回到代码中,这就是以下三种情况: if(results.value == codes&& i <= 9) if(results.value == codes[10]&& currentNumber != 0) if(results.value == codes[11]&& currentNumber != 9) 第一个if判断的是第一种情况,显示数字0~9。判断条件就是接收到的数据 results.value的值是不是数组中codes[0]~codes[9]的红外码。 第二个if判断的是第二种情况,是否接到后退键指令,也就是code[10]= 0xFD20DF,并且当前显示数字不为0。 第三个if判断的是第三种情况,是否接到前进键指令,也就是code[11]= 0xFDA857,并且当前显示数字不为9。 还有一个问题——如何找到数组中的元素呢?所以,就需要在if判断前设置一个for循环,让变量i一直在0~11之间循环。 第一件事判断是哪个红外码完成后,开始执行第二件事。 就是每个if语句后,都有相应的执行代码。就不一一详细说了。 整段代码就讲完了,这段代码应该是所有项目中最复杂的代码,可能一开始不能完全看明白,不过没关系,实践出真知,通过一遍遍不断的尝试,相信你总有一天能明白的。 课后练习 学习了如何使用遥控功能,DIY一个你的遥控作品吧!比如简单的会动的小人,结合我们前面的舵机,通过遥控器上不同的按键,让舵机转动不同的角度,发挥你的想象做出更多Arduino作品吧! 下一篇教程:Arduino教程16--音乐蜂鸣器 DFRobot版权所有,欢迎转载。 转载请务必标注来源: DF创客社区+作者姓名+原文网址。 |
本帖最后由 粒子 于 2022-1-5 16:45 编辑 Jane 发表于 2015-2-10 10:16 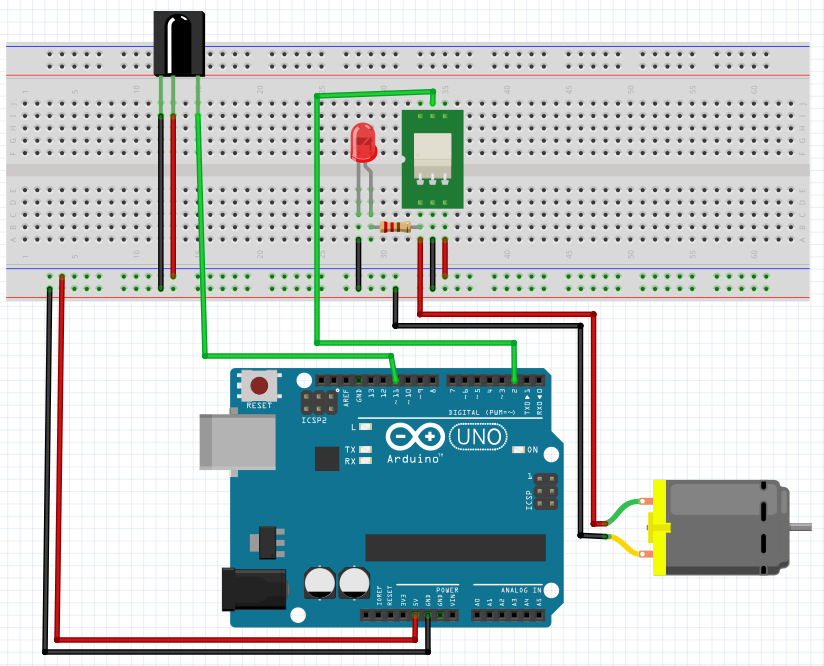 ## 这图里的 继电器可能型号有点问题,找了个样子有点像的## 总归就是Lesson 14里说的那种6脚的继电器,1、2脚做输入控制,输出脚只用4、6 直流电机本质上就是一根导线,工作之后是不是把板子局部短路了,才出这种问题的? 但是板子还是可以收信号的,只是解析出来的结果有问题,请教 下面是代码,仅仅改了几句话而已 #include <IRremote.h> int RECV_PIN = 11; int relayPin = 2; // Relay – digital 2 boolean relayState = LOW; // 继电器初始状态为LOW IRrecv irrecv(RECV_PIN); //设置RECV_PIN(11脚)为红外接收端 decode_results results; void setup(){ Serial.begin(9600); irrecv.enableIRIn(); //启动红外解码 pinMode(relayPin,OUTPUT); // 设置relayPin为输出状态 } void loop() { //是否接收到解码数据,把接收到的数据存储在变量results中 if (irrecv.decode(&results)) { Serial.println(results.value, HEX); //一旦接收到电源键的代码, relay翻转状态,HIGH变LOW,或者LOW变HIGH if(results.value == 0xFD00FF) { relayState = !relayState; //取反 digitalWrite(relayPin,relayState); //改变relay相应状态 } irrecv.resume(); // 继续等待接收下一组信号 } } |
|
代码验证上传后提示如下,请问该怎么修改呢? C:\Users\wenyue\AppData\Local\Temp\.arduinoIDE-unsaved202558-11960-1i5r85s.rzidi\sketch_jun8d\sketch_jun8d.ino:1:10: fatal error: IRremote.h: No such file or directory #include <IRremote.h> //调用IRremote.h库 ^~~~~~~~~~~~ compilation terminated. exit status 1 Compilation error: IRremote.h: No such file or directory |
|
Arduino:1.8.19 (Windows 10), 开发板:"Arduino Uno" sketch_sep30a:7:10: fatal error: IRremoteTools.h: No such file or directory #include <IRremoteTools.h> //调用IRremoteTools.h库 ^~~~~~~~~~~~~~~~~ compilation terminated. exit status 1 IRremoteTools.h: No such file or directory 请问各位大神,编译出现以上信息是啥意思啊? |
| 刚刚用家里的电视机遥控器试了一下,可以替代Mini IR Remote Controller,没有mini遥控器的朋友可以试哈 |
| 直接论坛里面红外的例子的代码拿来改改就可以用,自己家的遥控器发射时,用AURDUINO捕捉,用电脑的串口查出每个按键的码,然后就可以编程序了 |
|
#include <IRremote.h> int RECV_PIN = 11; int ledPin = 10; // LED – digital 10 //int ledPin9=9;// LED – digital 9 //int ledPin8=8;// LED – digital 8 boolean ledState = LOW; // ledstate用来存储LED的状态 //boolean ledState9 = LOW; // ledstate用来存储LED9的状态 //boolean ledState8 = LOW; // ledstate用来存储LED8的状态 IRrecv irrecv(RECV_PIN); decode_results results; #include <Servo.h> // 声明调用Servo.h库 Servo myservo; // 创建一个舵机对象 //int potpin = 0; // 连接到模拟口0 int val=0; //变量val用来存储从模拟口0读到的值 void setup(){ Serial.begin(9600); irrecv.enableIRIn(); pinMode(ledPin,OUTPUT); // 设置LED为输出状态 // pinMode(ledPin9,OUTPUT); // 设置LED为输出状态 // pinMode(ledPin8,OUTPUT); // 设置LED为输出状态V myservo.attach(9); // 将引脚9上的舵机与声明的舵机对象连接起来 } void loop() { if (irrecv.decode(&results)) { Serial.println(results.value, HEX); //一旦接收到电源键的代码, LED翻转状态,HIGH变LOW,或者LOW变HIGH // if(results.value == 0xFD00FF){ if(results.value == 0xFD48B7){//Button 3 // if(results.value == 0x1EC81DBF){//TVButton 3 // ledState = !ledState; //取反 // digitalWrite(ledPin,ledState); //改变LED相应状态 val-=100; ledState = 1; if(val<100) {val=100;ledState=0;} } if(results.value == 0xFD08F7){//Button1 //if(results.value == 0x6BC6597B){//TVButton1 // ledState9 = !ledState9; //取反 // digitalWrite(ledPin9,ledState9); //改变LED相应状态 val+=100; ledState = 1; if(val>900) {val=900;ledState=0;} } // if(results.value == 0xFD8877){//Button2 // // if(results.value == 0x735B797E){//TVButton2 // ledState8 = !ledState8; //取反 // digitalWrite(ledPin8,ledState8); //改变LED相应状态 // } if(ledState==1){ int val1; Serial.println(val); val1 = map(val, 0, 1023, 0, 179); //通过map函数进行数值转换 myservo.write(val1); // 给舵机写入角度 ledState=0; } delay(15); // 延时15ms让舵机转到指定位置 irrecv.resume(); } } |
|
请教: 拿这个电路和 Lesson 14--自制风扇 的电路简单合并了一下(就是把手动开关,换成红外遥控的) 发现一个奇怪情况,只要直流电机并在电路里面。 一旦继电器被导通,电机 LED开始工作,IRemote 部分似乎就罢工了,什么反映都没有。 Arduino板子上只要收到红外信号,总有个LED会闪亮,这种情况下,不论怎么发信号都不亮 但是只要把直流电机从里面拿走,剩下的部分可以非常完美的工作。 怎么破? |
droid_noob 发表于 2015-2-8 21:04 刚又试了一把,电机运作的时候,红外部分可以工作了 但是从串口里面出来的数据像是随机的,一般长按会一直吐FFFFFF 这种情况下面出来每一条都不一样,也不是FFFFFF |
Jane 发表于 2015-2-9 10:05 我去掉原型盾板,直接在 Uno 主板上试,效果是一样一样的 遥控器上挑一个键一直按住,从串口log上来看,IRemote 吐出来的东西是随机的 我去!直流电机还能不能一起快乐的玩耍了:curse:,一直干扰红外工作 截取一段串口数据: ... AAD5B6D4 // 这东西位数都不对了,正常应该是6位,这7、8位 44172A6A C40BD817 FEAC02E4 202F132B 4CB0FADF 3021E99 4AB0F7B5 DBE32B77 DE80C3EB 69DBBC3E ... =========================================================== 你说的:会不会转一会儿就停了,或者POWER灯变暗了 这个真没见着。 =========================================================== 其实电路很简单,红外控制继电器开合,继电器4脚6脚,连直流电机两端 验证这个电路也很简单,直流电机换成一个LED就行了,LED 的时候,完美工作啊 要不楼主试试,很诡异 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 版主限定
版主限定
 牛X认证
牛X认证
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师






