|
15721| 7
|
[入门教程] 狄仁杰机甲|基于mPythonX的掌控板无线遥控模式 |
本帖最后由 rzyzzxw 于 2019-9-8 19:37 编辑  这个帖子,回归mPythonX0.3.4,做基于掌控无线的狄仁杰小车遥控。 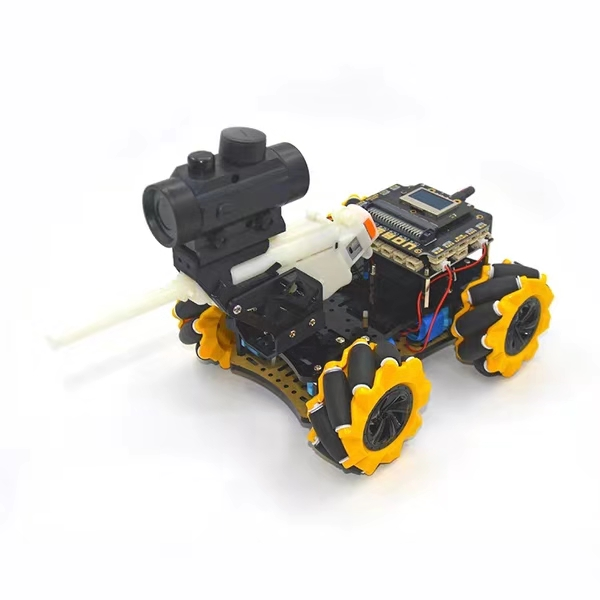 器材准备: 狄仁杰机甲 1 掌控板 1 扩展板 1 【特别提示:机甲千万条,安全第一条。使用不规范,亲人两行泪】 【特别提示:水弹波箱是物理能量输出单元,射出水弹有较高速度,请勿对准人和动物及他人财物,请佩戴护目镜】 【注:本项目中狄仁杰机甲4电机安装在上底板】 其实一步步调试过来,是一个蛮长的过程,特别是对第一次玩麦轮的我来说。基本思路是,先能轮子正反转,再能配合起来实现各种运动动作,再加上水弹和舵机控制。 先不加遥控实现功能,再加上无线遥控。 不要急,慢慢来。 计划实现: 遥控功能 向左倾斜 左移 向右倾斜 右移 向前倾斜 前进 向后倾斜 后退 平放 停车 按P 左转按N 右转 按H 射击 STEP1 用了X,要从头开始写程序了。这时候,又参考说明书了,上面对四个电机的接线,一个水弹枪、一个舵机的接线都有要求。 同时说明书对麦轮小车多种运动方式的车轮转向都有讲解。 启动X0.3.4 开始机甲端编程 打开无线广播  定义电机转向函数 我们要定义四个正向,四个反向 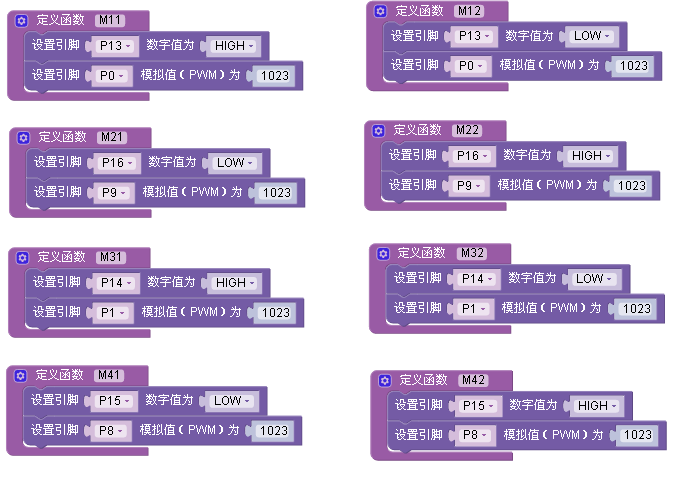 定义函数小车的前进后退左移右移并测试  定义函数左转和右转 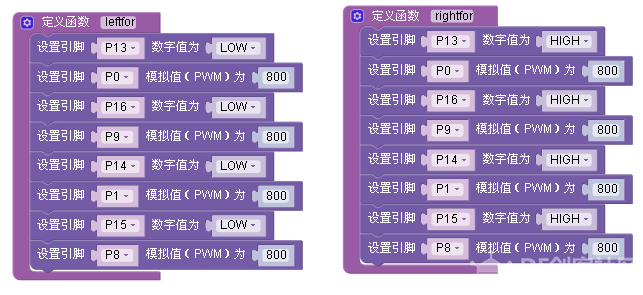 定义函数停车 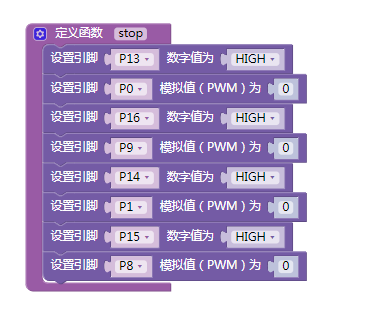 小车接收信号前进和后退、左移和右移 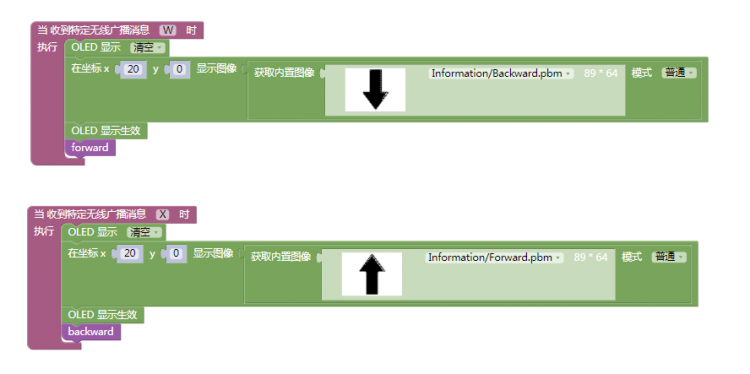 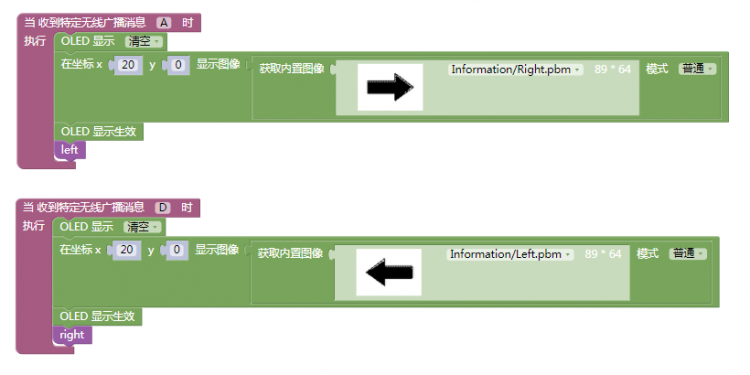 小车接收信号停车 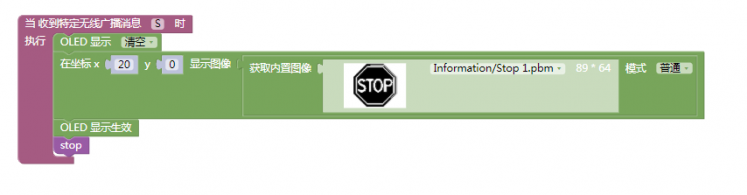 小车接收信号左转和右转 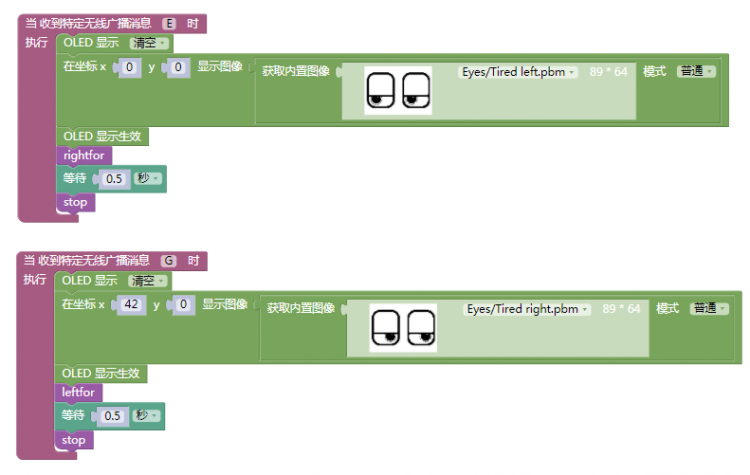 水弹枪发射 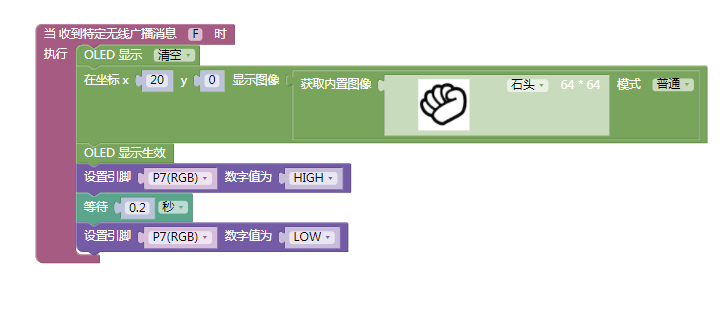 舵机功能还在调试中…… 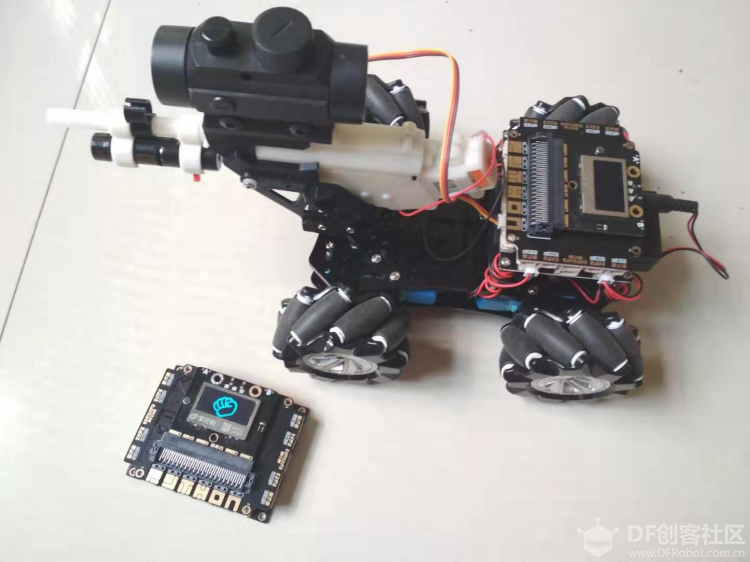 STEP2 遥控掌控端 打开无线广播 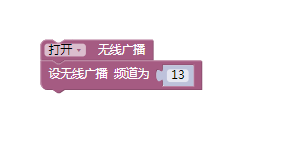 小车运动控制 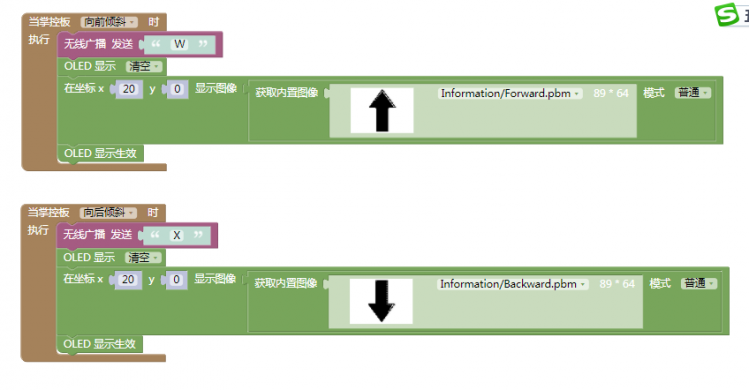 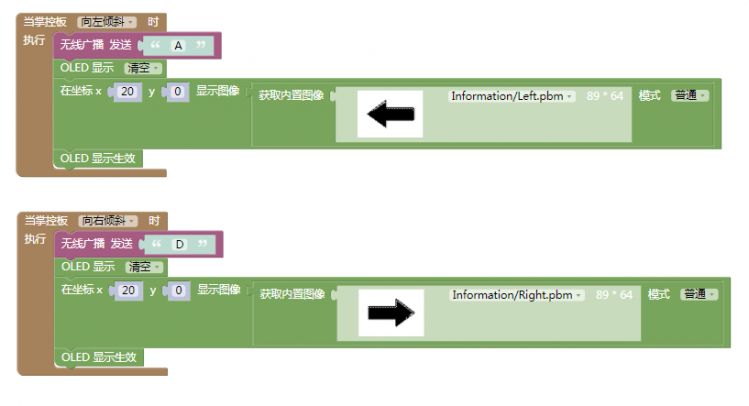  发射控制  转向控制 左转 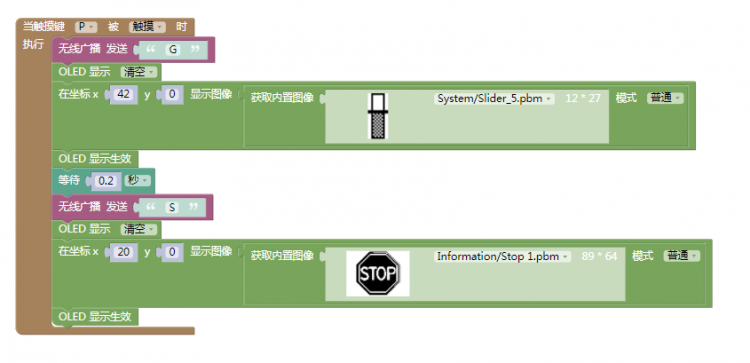 右转 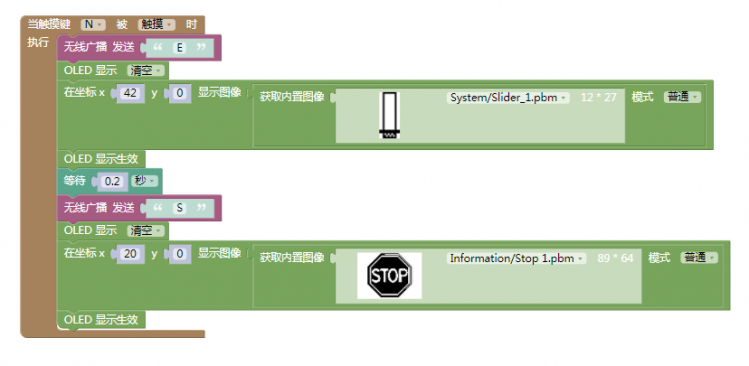 舵机控制功能没有加 测试视频:  狄仁杰接收.zip狄仁杰遥控.zip 狄仁杰接收.zip狄仁杰遥控.zipSTEP3 尝试用micro:bit 的手柄来装上掌控板遥控。 小车程序不变。 先对照一下micro:bit和掌控板的引脚。 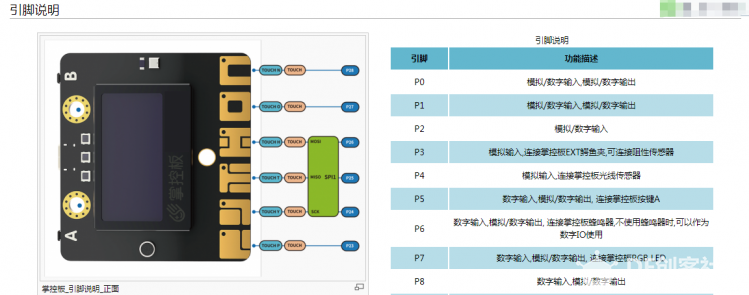 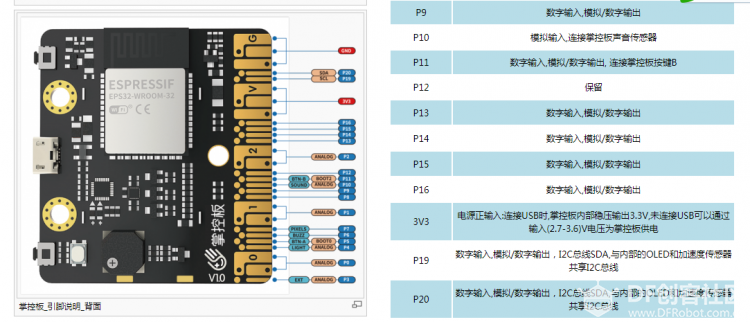 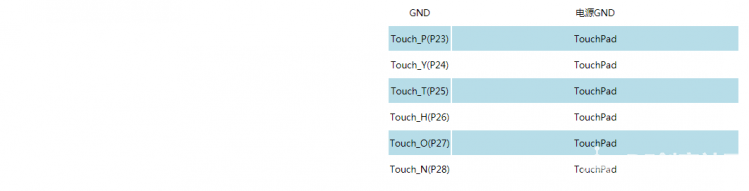 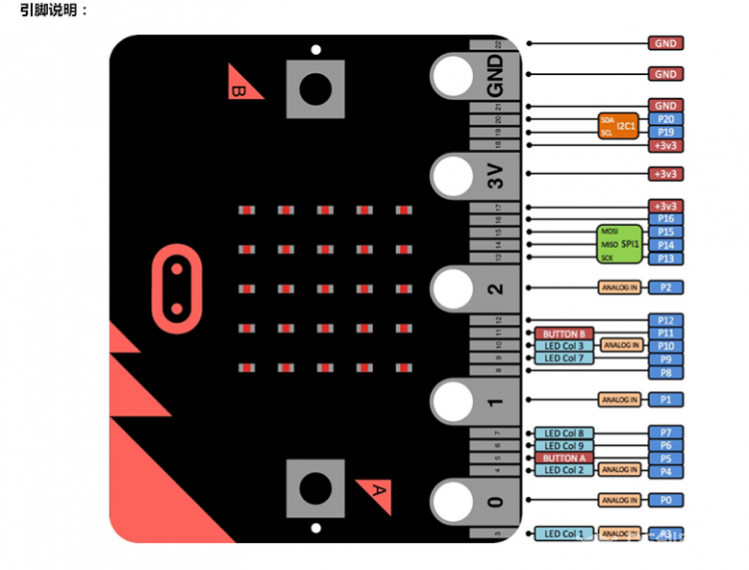 哈哈是一样的。这就好办了。查查手柄的资料。   无线通信设置  按Y健停车  上下左右键分别前进后退左移右移 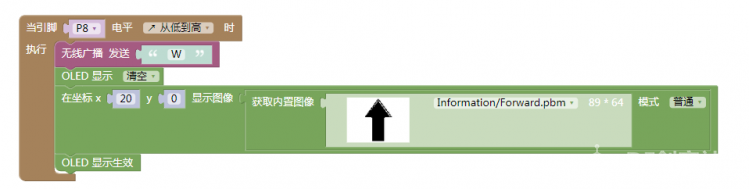 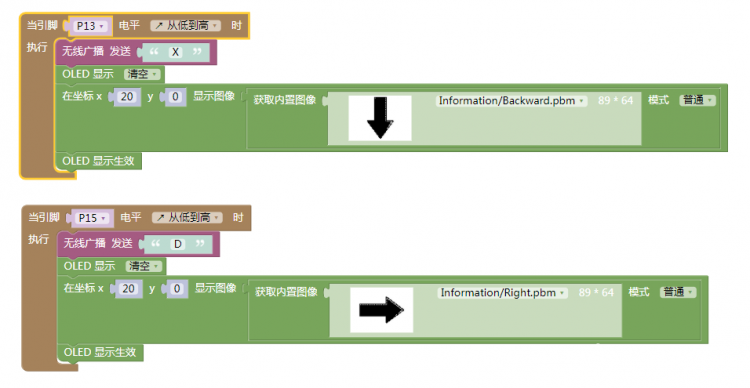 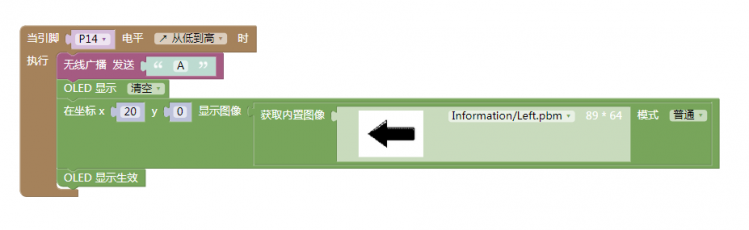 X键开炮  AB分别左转一点右转一点 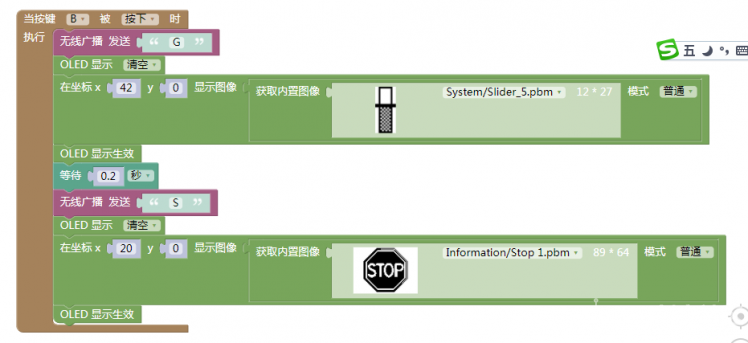 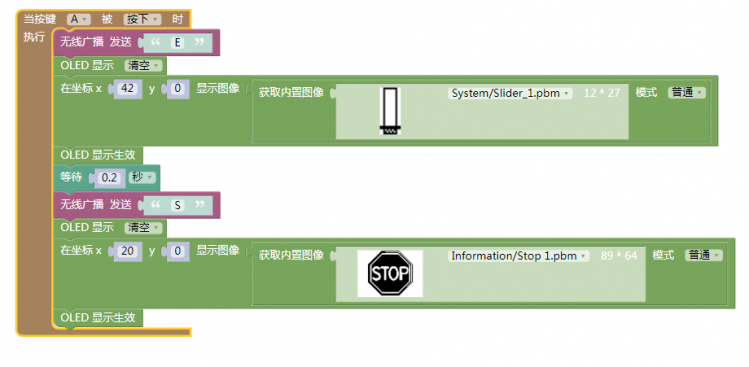 参考程序 狄仁杰遥控_bit手柄.zip |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









