|
7439| 4
|
手势识别带触摸传感器试用1:手势识别功能 |
|
本帖最后由 szjuliet 于 2019-9-8 09:43 编辑 手势识别带触摸传感器试用1:手势识别功能 手势识别带触摸传感器试用2:触摸功能 器材: 虚谷号教育版 虚谷号扩展板(购买链接:https://www.dfrobot.com.cn/goods-1953.html) 手势带触摸传感器(购买链接:https://www.dfrobot.com.cn/goods-1994.html) 视频: 传感器wiki:https://www.dfrobot.com.cn/goods-1994.html 一、开箱 感谢发货的小姐姐,知道我们干活辛苦,将不能吃不能玩的泡沫块换成了小零食,简直太贴心了,周末从早到晚整整监考两天,只能今晚加班干活,零食派上大用场了。   二、在UNO上测试
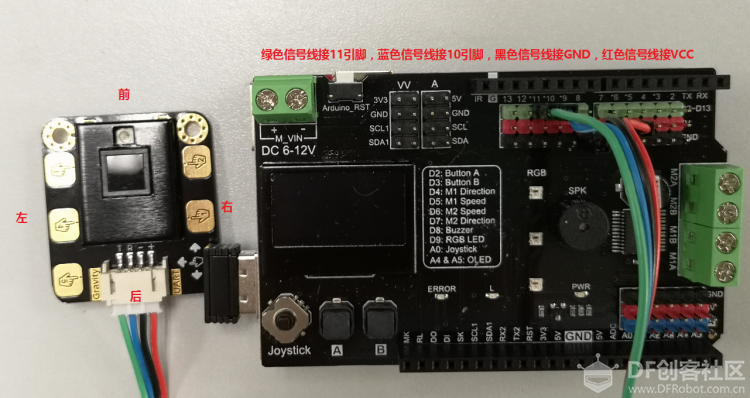
手势识别传感器为串口设备,而普通Arduino只有一个硬件串口,所以使用软串口来配合传感器使用 接线图: 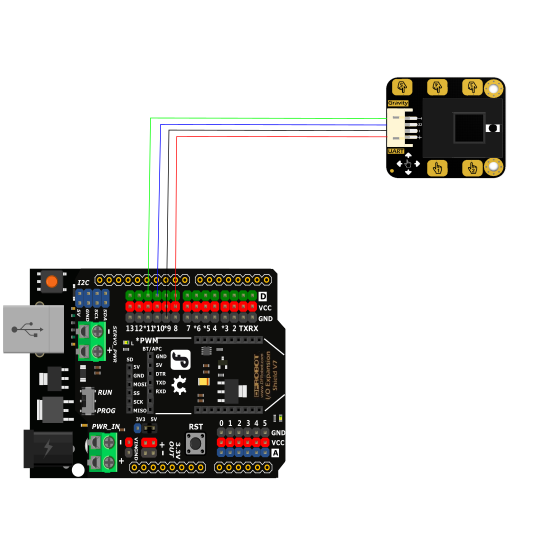 (图片来源:DF)
绿色信号线接11号引脚,蓝色信号线RXD接10号引脚,黑色信号线接GND,红色信号线接VCC  (图片来源:DF)
将需要的库文件复制到Arduino的库目录下,在arduino IDE中打开示例文件simpleGuester,或直接复制下面的代码: [mw_shl_code=cpp,true]/* * file simpleGesture.ino * * @ https://github.com/DFRobot/DFRobot_Gesture_Touch * * example for DFRobot Gesture&Touch sensor * * sensor event will print on your serial monitor * * for esp32, rx_pin = D5, tx_pin = D6 * * Copyright [DFRobot](http://www.dfrobot.com), 2016 * Copyright GNU Lesser General Public License * * version V1.0 * date 2018-10-19 */ #include "DFRobot_Gesture_Touch.h" #ifdef __AVR__ #include "SoftwareSerial.h" SoftwareSerial mySerial(10, 11); // example for uno, use software serial #elif defined ESP_PLATFORM #include "HardwareSerial.h" HardwareSerial mySerial(1); #endif DFRobot_Gesture_Touch DFGT(&mySerial); // init sensor object, request write and read function void setup() { Serial.begin(115200); mySerial.begin(9600); delay(2000); while(mySerial.available()) // flush serial buffer mySerial.read(); Serial.println("gesture&touch sensor test"); DFGT.setGestureDistance(20); // suggest default value // DFGT.enableFunction(DFGT_FUN_ALL); // enable all functions // DFGT.disableFunction(DFGT_FUN_RIGHT | DFGT_FUN_LEFT); // disable function test // DFGT.disableFunction(DFGT_FUN_TOUCH1 | DFGT_FUN_TOUCH2); // disable function test // DFGT.enableFunction(DFGT_FUN_RIGHT | DFGT_FUN_LEFT); // enable function test // DFGT.setSleep(4); // set auto sleep time out, in sleep mode, put something } void loop() { int8_t rslt = DFGT.getAnEvent(); // get an event that data saved in serial buffer if(rslt != DF_ERR) { // DFGT.setSleep(DFGT_SLEEP_DISABLE); // disable auto sleep switch(rslt) { case DFGT_EVT_BACK: { Serial.println("get event back"); } break; case DFGT_EVT_FORWARD: { Serial.println("get event forward"); } break; case DFGT_EVT_RIGHT: { Serial.println("get event right"); } break; case DFGT_EVT_LEFT: { Serial.println("get event left"); } break; case DFGT_EVT_PULLUP: { Serial.println("get event pull up"); } break; case DFGT_EVT_PULLDOWN: { Serial.println("get event pull down"); } break; case DFGT_EVT_PULLREMOVE: { Serial.println("get event pull and remove"); } break; case DFGT_EVT_TOUCH1: { Serial.println("get event touch1"); } break; case DFGT_EVT_TOUCH2: { Serial.println("get event touch2"); } break; case DFGT_EVT_TOUCH3: { Serial.println("get event touch3"); } break; case DFGT_EVT_TOUCH4: { Serial.println("get event touch4"); } break; case DFGT_EVT_TOUCH5: { Serial.println("get event touch5"); } break; } } }[/mw_shl_code] 程序上传后进行测试,很快就在串口监视器显示结果(截图写文字时把上下写反了): 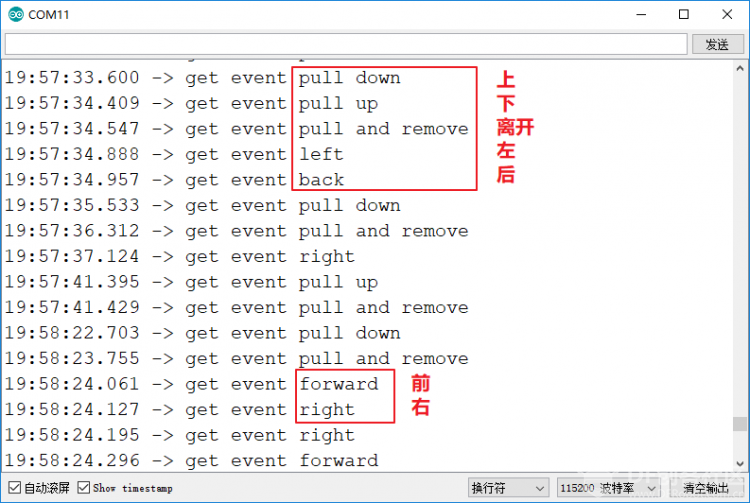 刚开始对手势不太熟练,测试结果总是觉得不对,试过几次发现是需要技巧的: 首先传感器按下面的方向放置,手势的方向如图所示;其次手势的动作要迅速,太慢不行。 另外还有一点非常重要,进行上下动作时手不要发生水平的位移;进行水平移动时,手不要发生垂直方向的位移。否则传感器就容易判断出错:到底是前后左右还是上下。 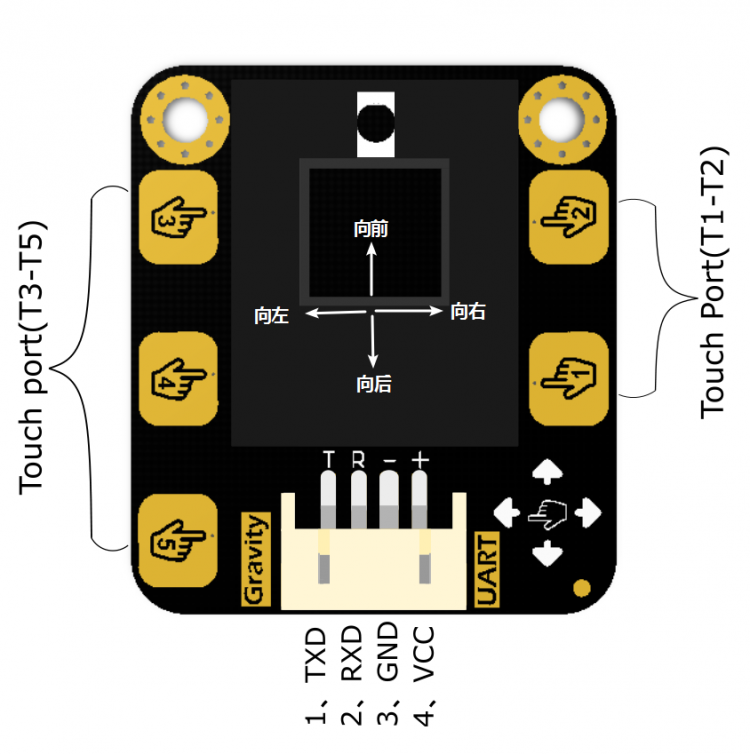 调整好传感器并以迅速的手势挥动,识别的结果基本就全部与预期动作一致了。 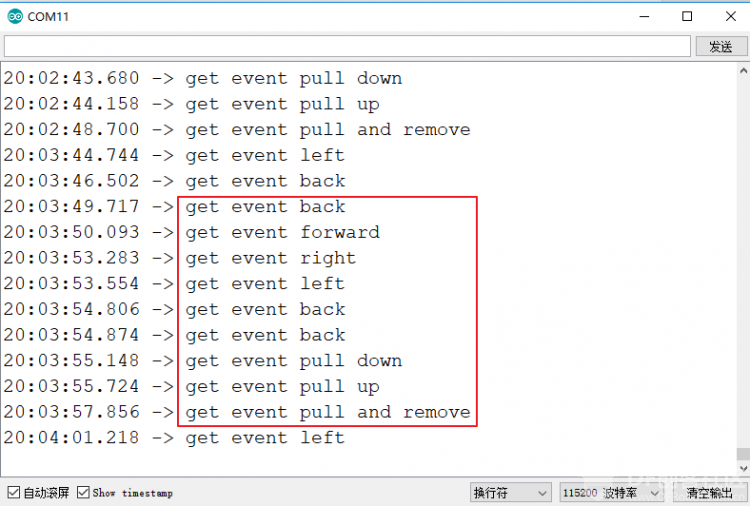 一共支持7种动作:向右、向左、向后、向前、下压pull down、上拉pull up及上拉下压后手松开pull and remove 三、在虚谷号上测试:
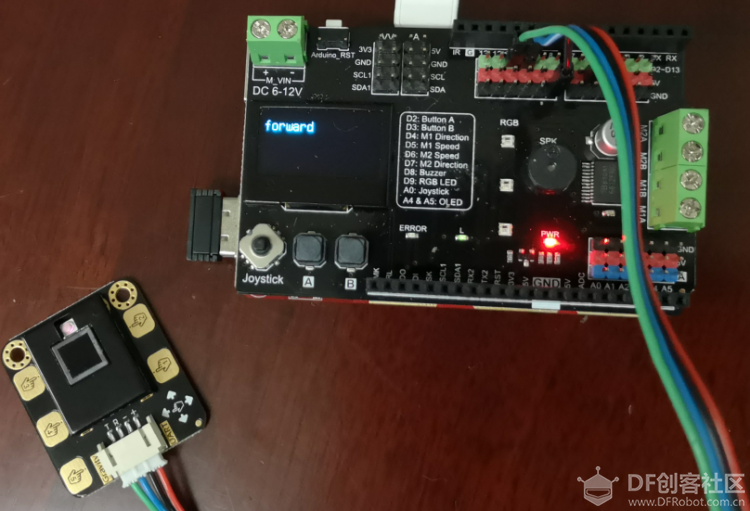
 将需要的库文件复制到虚谷号vvboard-->Arduino-->02.lib目录下(可以使用U盘方式直接复制,或使用主机模式在浏览器中下载到目录),在arduino IDE中打开示例文件simpleGuester,或直接复制前面的代码。 将代码上传到虚谷号,成功后打开串口监视器,稍等片刻就会输出识别结果: 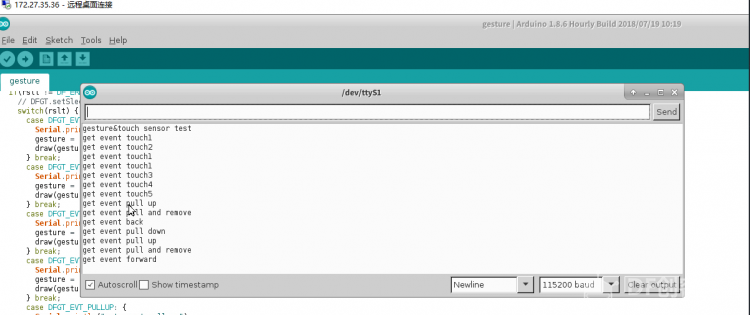 在虚谷号上识别的结果感觉不如UNO上的好,反映要慢一些。
 四、程序代码 [mw_shl_code=cpp,true]/* * file simpleGesture.ino * * @ https://github.com/DFRobot/DFRobot_Gesture_Touch * * example for DFRobot Gesture&Touch sensor * * sensor event will print on your serial monitor * * for esp32, rx_pin = D5, tx_pin = D6 * * Copyright [DFRobot](http://www.dfrobot.com), 2016 * Copyright GNU Lesser General Public License * * version V1.0 * date 2018-10-19 */ #include "DFRobot_Gesture_Touch.h" #include <Adafruit_NeoPixel.h> #include "U8glib.h" U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE|U8G_I2C_OPT_DEV_0); // I2C / TWI char* gesture; #ifdef __AVR__ #include "SoftwareSerial.h" SoftwareSerial mySerial(10, 11); // example for uno, use software serial #elif defined ESP_PLATFORM #include "HardwareSerial.h" HardwareSerial mySerial(1); #endif Adafruit_NeoPixel strip = Adafruit_NeoPixel(PIXEL_COUNT, PIXEL_PIN, NEO_GRB + NEO_KHZ800); DFRobot_Gesture_Touch DFGT(&mySerial); // init sensor object, request write and read function void draw(char* gesture) { // graphic commands to redraw the complete screen should be placed here u8g.setFont(u8g_font_unifont); u8g.setPrintPos(0, 20); // call procedure from base class, http://arduino.cc/en/Serial/Print u8g.print(gesture); } void setup() { Serial.begin(115200); mySerial.begin(9600); delay(500); while(mySerial.available()) // flush serial buffer mySerial.read(); Serial.println("gesture&touch sensor test"); strip.begin(); strip.show(); // Initialize all pixels to 'off' DFGT.setGestureDistance(20); // suggest default value // DFGT.enableFunction(DFGT_FUN_ALL); // enable all functions // DFGT.disableFunction(DFGT_FUN_RIGHT | DFGT_FUN_LEFT); // disable function test // DFGT.enableFunction(DFGT_FUN_RIGHT | DFGT_FUN_LEFT); // enable function test // DFGT.setSleep(4); // set auto sleep time out, in sleep mode, something approach will weak it up } void loop() { u8g.firstPage(); do { draw(gesture); } while( u8g.nextPage() ); // rebuild the picture after some delay delay(500); int8_t rslt = DFGT.getAnEvent(); // get an event that data saved in serial buffer if(rslt != DF_ERR) { // DFGT.setSleep(DFGT_SLEEP_DISABLE); // disable auto sleep switch(rslt) { case DFGT_EVT_BACK: { Serial.println("get event back"); gesture = "back"; draw(gesture); } break; case DFGT_EVT_FORWARD: { Serial.println("get event forward"); gesture = "forward"; draw(gesture); } break; case DFGT_EVT_RIGHT: { Serial.println("get event right"); gesture = "right"; draw(gesture); } break; case DFGT_EVT_LEFT: { Serial.println("get event left"); gesture = "left"; draw(gesture); } break; case DFGT_EVT_PULLUP: { Serial.println("get event pull up"); gesture = "pull up"; draw(gesture); } break; case DFGT_EVT_PULLDOWN: { Serial.println("get event pull down"); gesture = "pull down"; draw(gesture); } break; case DFGT_EVT_PULLREMOVE: { Serial.println("get event pull and remove"); gesture = "pull and remove"; draw(gesture); } break; case DFGT_EVT_TOUCH1: { Serial.println("get event touch1"); gesture = "touch1"; draw(gesture); } break; case DFGT_EVT_TOUCH2: { Serial.println("get event touch2"); gesture = "touch2"; draw(gesture); } break; case DFGT_EVT_TOUCH3: { Serial.println("get event touch3"); gesture = "touch3"; draw(gesture); } break; case DFGT_EVT_TOUCH4: { Serial.println("get event touch4"); gesture = "touch4"; draw(gesture); } break; case DFGT_EVT_TOUCH5: { Serial.println("get event touch5"); gesture = "touch5"; draw(gesture); } break; } } }[/mw_shl_code] 试用感受: 要让手势识别传感器按自己的设想动作效果并不容易,如果用在项目中可能会有误操作,需要使用者多次练习:手势动作要迅速;进行上下动作时手不要发生水平的位移;进行水平移动时,手不要发生垂直方向的位移。 刚开始测试时,各个手势都还能识别,但是试用到后来,向左的手势无论如何也识别不出来。过了一天再重新上电又能够识别了。稳定性还是有待改进。 总结:手势识别准确率不高,现实应用意义不大。接下来进行触摸功能的测试。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 版主限定
版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 星球译员
星球译员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






