|
13827| 14
|
[项目分享] Huskylens|麦昆+二哈,都是追梦人_简易版 |
 2019:我们都在努力奔跑,我们都是追梦人! 这个项目,二哈与麦昆联手,一起去做追梦人。 【测试项目】 麦昆+二哈 颜色识别追球 【测试视频】 【器材准备】 麦昆3.0锂电版 1 二哈测试版 1 网球 1 【器材组装】 如图,二哈接IIC  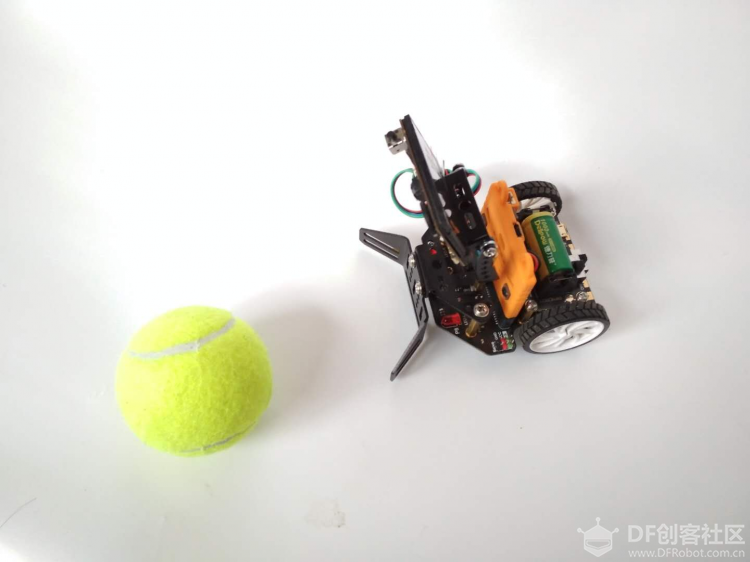  【STEP1】 下载安装Mind+1.6.2 里面有测试版Mind+1.6.2 还有刷固件工具和新版固件,出厂固件0.1.9,把固件升级为0.4.3 【STEP2】 硬件连接,使用Gravity 4P线连接HuskyLens与麦昆扩展板上的IIC口(SCL\SDA)(程序中初始化使用了IIC)。 启动软件,添加麦昆,传感器添加二哈  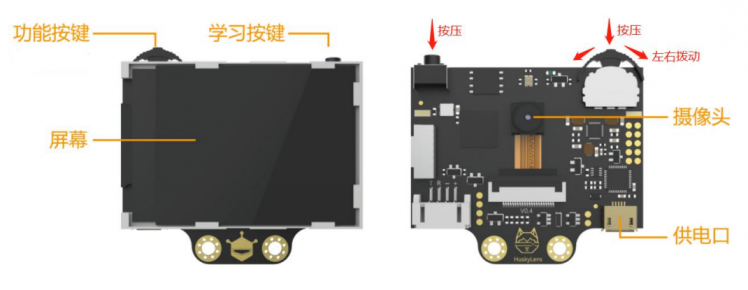 【STEP3】 上电,二哈切换到颜色识别模式,对准网球,十字瞄准,按下学习键,开始近与远不同角度的学习。(如果效果不理想,可以遗忘后再学习一次。) 写程序串口输出识别方框中心的X,Y坐标,开始对屏幕坐标增加认识。  刷入主控,二哈上电,点击串口读数显示按钮,移动小球位置,分析位置与读数的关系。 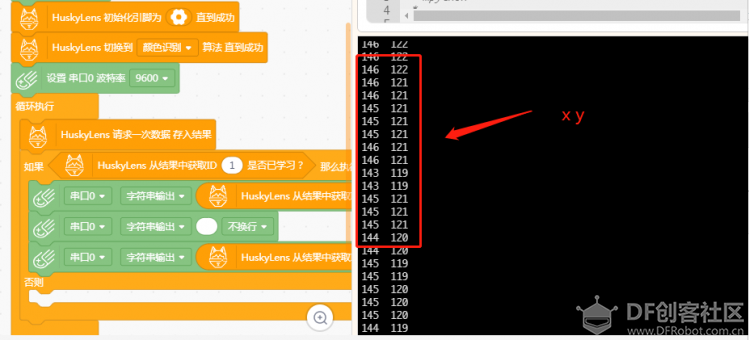 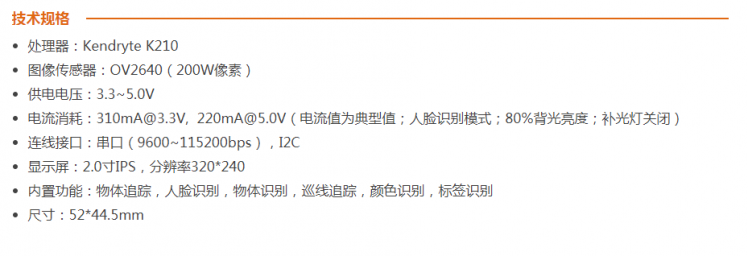 得到的结论如下: 屏幕为320*240像素,左上角为0,0点,XY轴如下图。 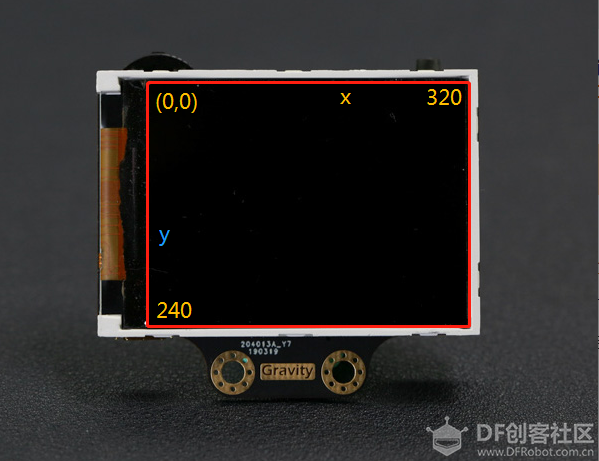 后面编程中计划把屏幕XY方向都平分成5个区域。 根据捕捉到ID的方框中心点XY坐标来判断小球的左右位置和前后远近,从而小车采取不同的动作。 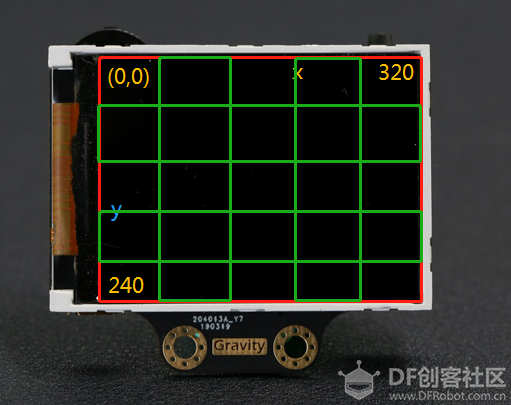 【STEP4】简易编程如下,高级版本大家来做吧。 基本思路是:捕捉方框中心点X坐标小于等于120,球在左边,左转。 捕捉方框中心点X坐标大于等于200,球在右边,右转。 当球基本在前方时,X坐标在120-200之间,根据Y坐标进行前进,后退和停止的判断。 捕捉方框中心点Y坐标小于等于90,球在前方,前进。 捕捉方框中心点Y坐标大于等于150,球在近处,后退。 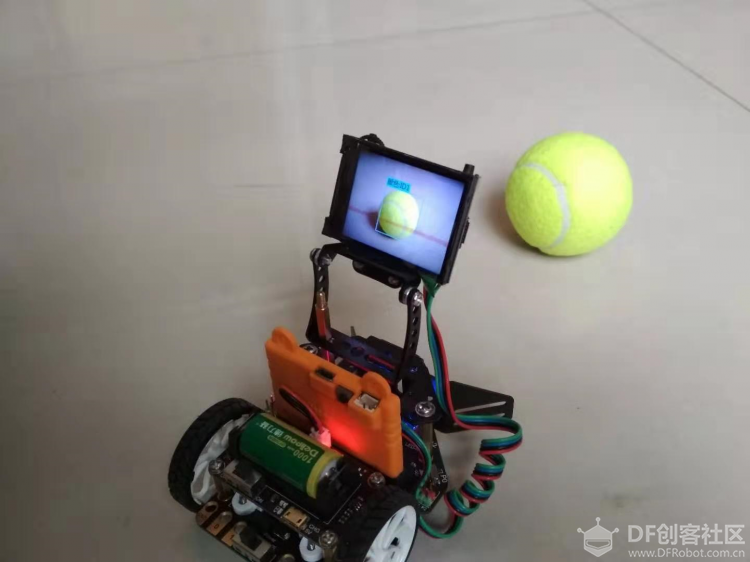 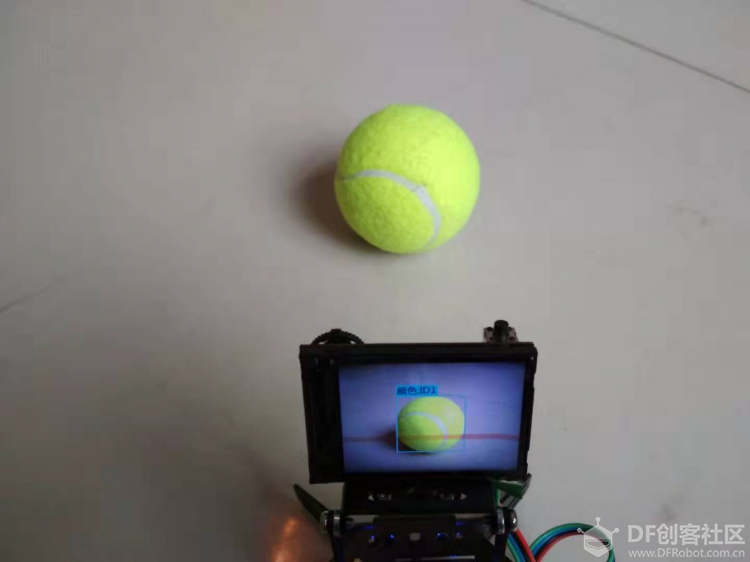   下面程序中加入了加速前进后退左转右转的判断。 【1】初始化设备,串口  【2】小于等于120左转与大于等于200右转  【3】120-200之间,球基本在前方,进行前进后退及停止的判断  【4】定义一些函数   二哈追球.zip 二哈追球.zip【5】程序的优化还没有结束。 火箭老师提出了一些建议: 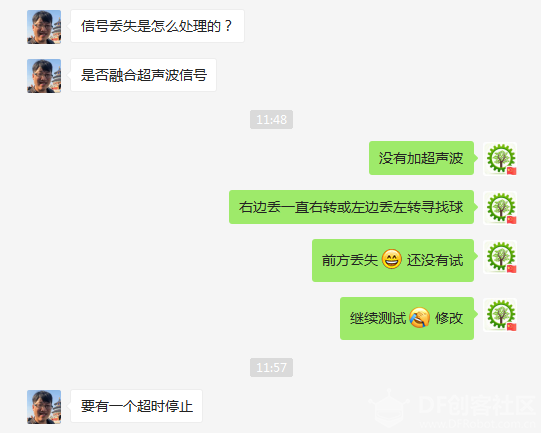 而这些要求呢,后面慢慢优化吧。 聪明的你,一起来做啊。  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









