|
49461| 18
|
[项目] 用麦克纳姆轮做一个蓝牙控制小车 |

|
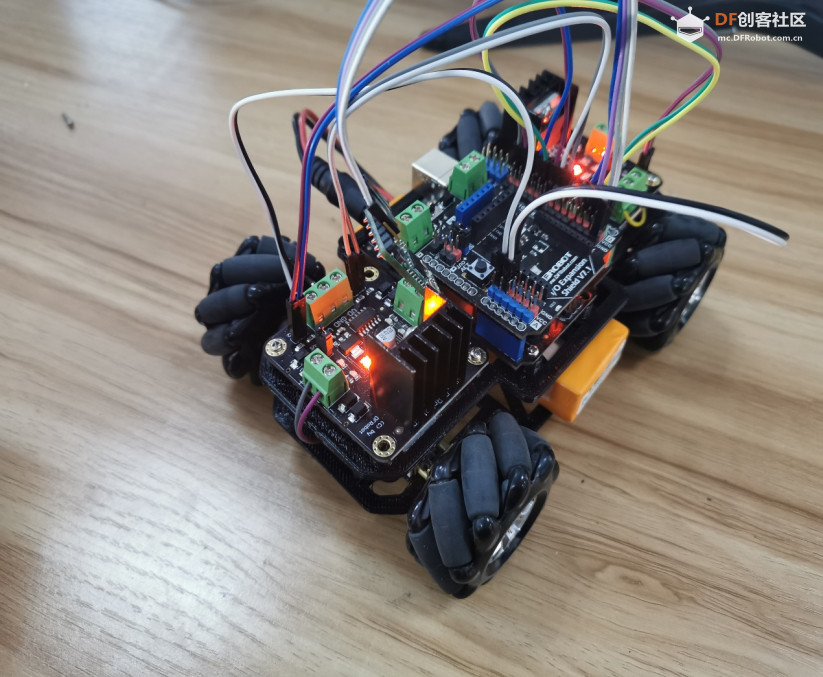
本帖最后由 WLE 于 2021-5-19 08:55 编辑 在竞赛机器人和特殊工种机器人设计中,全向移动往往是一个必需的功能。“全向移动”意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用麦克纳姆轮这种特殊轮子。 这种全向移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。基于麦克纳姆轮技术的全方位运动设备可以实现前行、横移、斜行、旋转及其组合等运动方式。在此基础上研制的全方位叉车及全方位运输平台非常适合转运空间有限、作业通道狭窄的环境,在提高保障效率、增加空间利用率以及降低人力成本方面具有明显的效果。 我们这里用麦克纳姆轮来做一个蓝牙控制的小车,使用的主控制器是Arduno Uno。蓝牙模块来接收控制信号,使用了两块两路的可调速电机驱动板,以及4个减速电机来完成这次制作。 实物图: 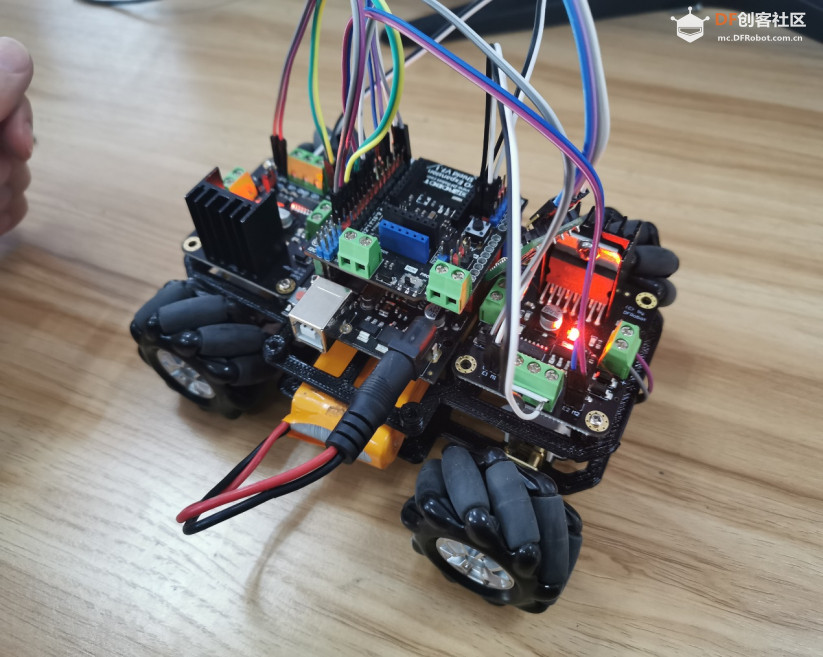 麦克纳姆轮外观  接线图 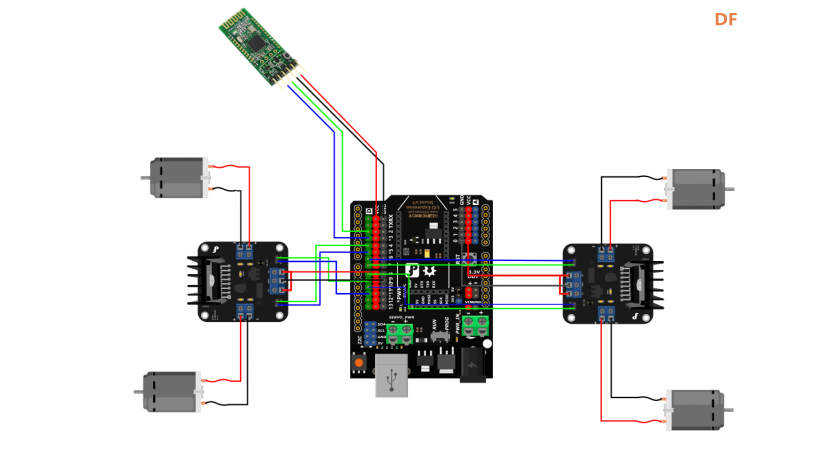 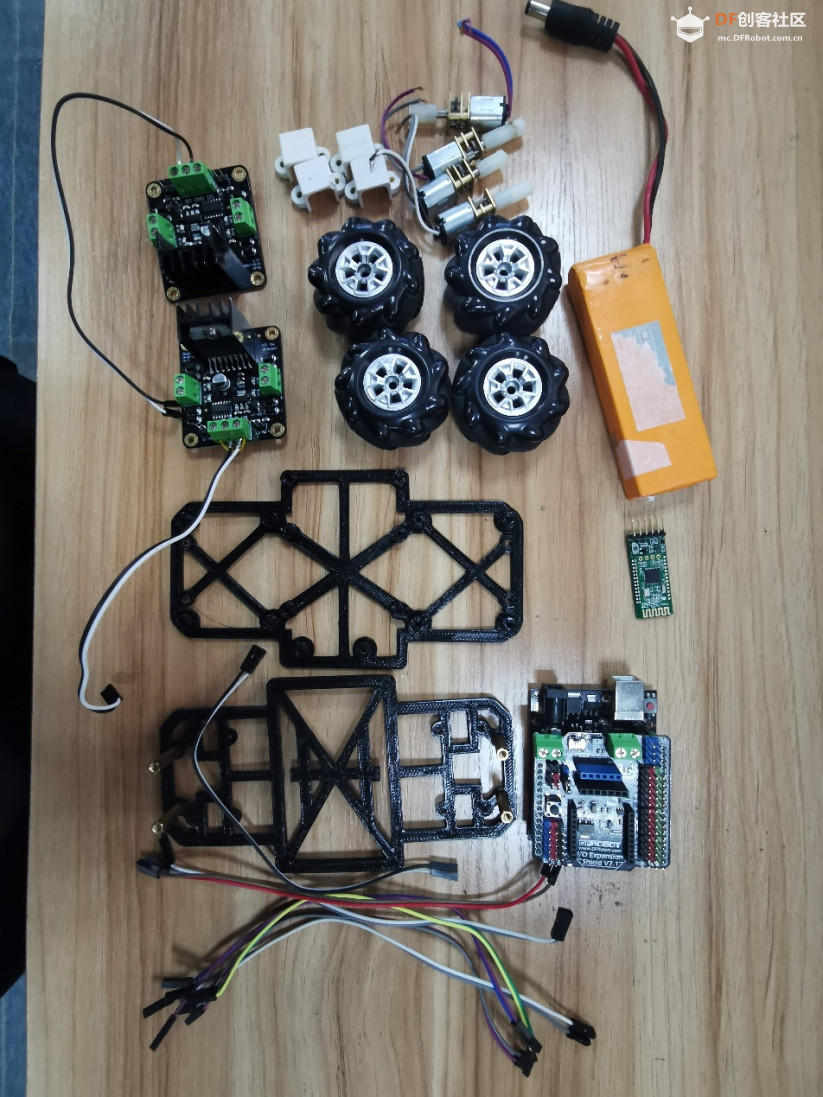 这里是3D打印的小车支架  下面讲解一下小车详细的制作过程 首先将4个减速电机电源线焊接上并接好联轴器  然后将电机安装在小车的底盘上(注意上面模板和下面模板有所区别,下面模板安装电机,上面个模板安装控制总控制器和驱动板,都留有安装孔) 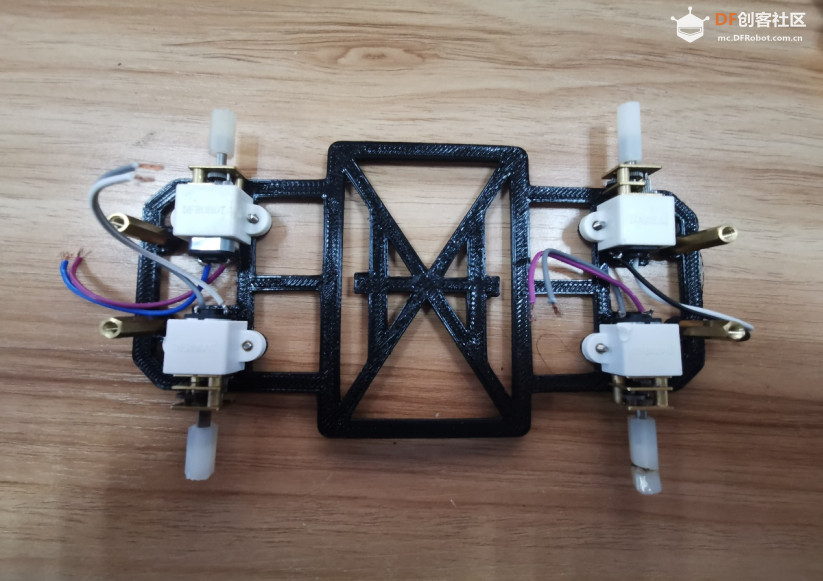 小车下面一层的安装已经基本完成,下面按上上面的模板 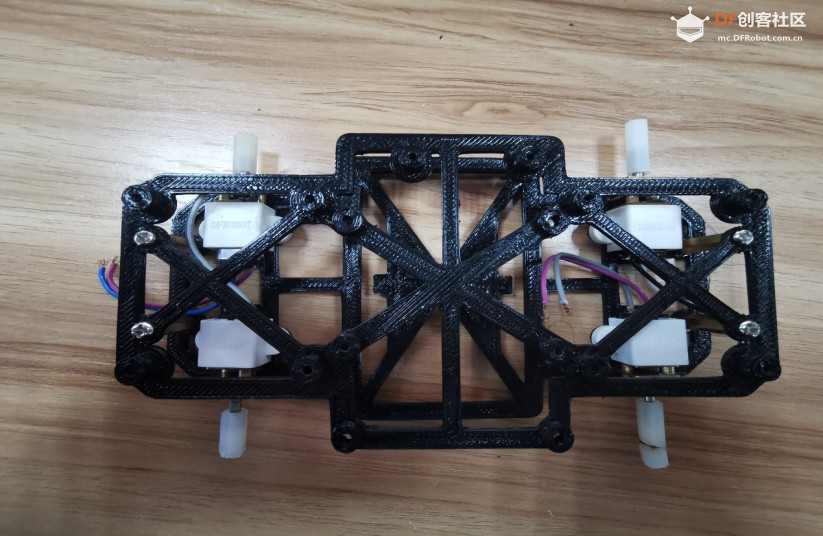 接下来就是安装电机驱动板和连接电机了,连接电机时要注意电机驱动板的M和E都接高电平时所有的电机因该方向一致。  将电池放上 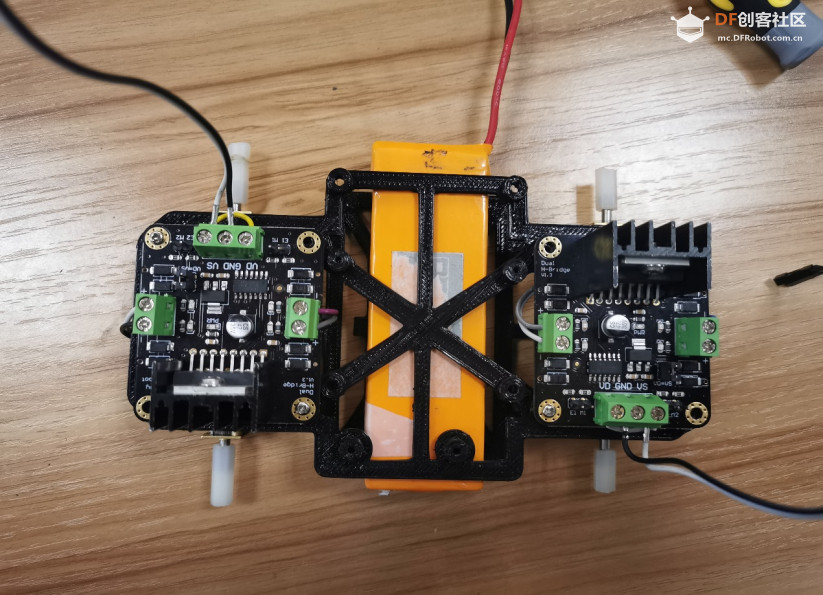 安装上Arduino控制器和扩展板 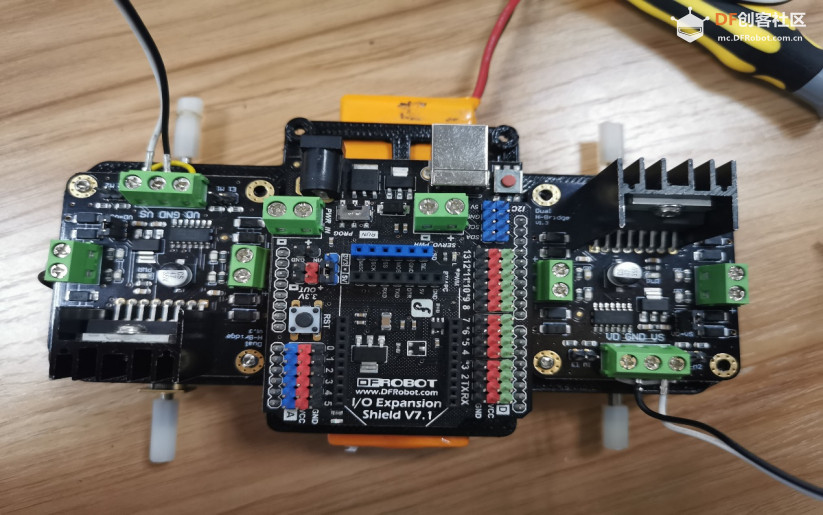 然后安装麦克纳姆轮,这里一定要注意我们所拿到的麦克纳姆轮的内侧都标有R或L,四个轮子中R或L各有两个。一定要按照左前轮为L、右前轮为R、左后轮为R、右后轮为L的顺序安装轮子。  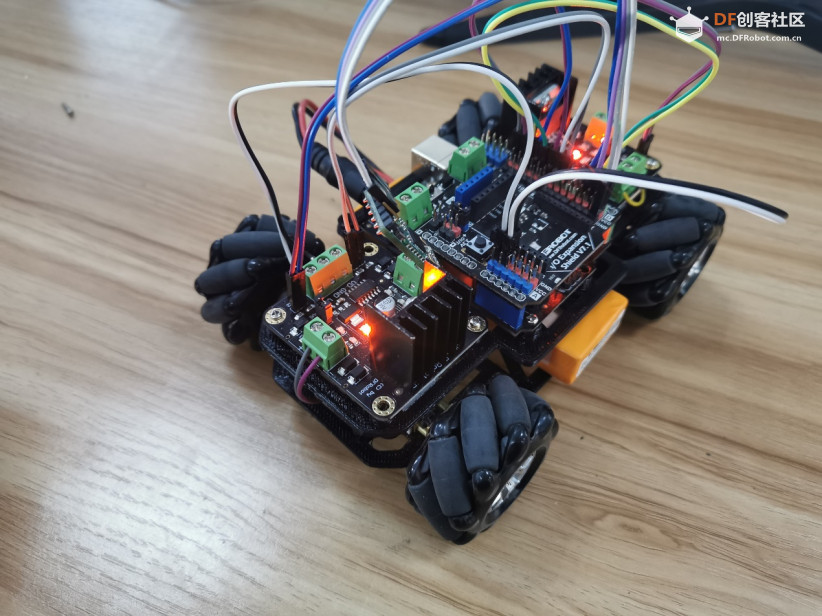 接下来就是按照接线图将排线接上。然后上传好程序就大功告成了。 接下来就是关于手机APP相关的教程了。 点击下载蓝牙调试APP. 打开手机蓝牙和蓝牙调试APP,可以搜索到周围的蓝牙设备。  点击下面的专业调试,然后点击加号  输入工程的名字,选择横屏视图然后点击确定。  点击你工程的名字,选择通讯设置。  点击字节值的加号添加4个字节值,点击右上角的问号可以查看数据包说明。这对自主写程序非常重要。  回到主界面点击编辑控件  点击上面加号添加一个遥感和两个按钮放在合适的位置。 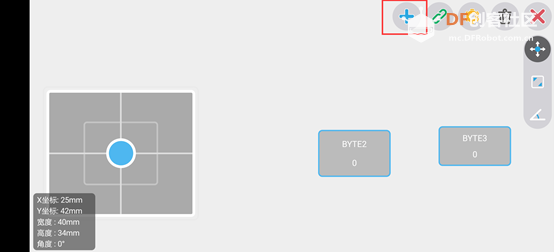 在添加摇杆时请按如下选择。  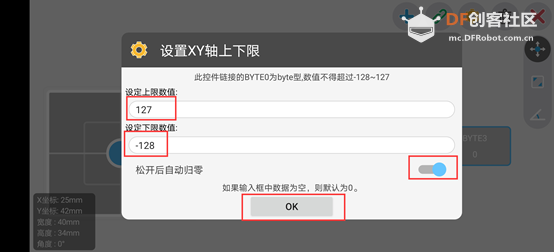 左边按钮控制小车逆时针旋转请按以下设置。   右边按钮控制小车顺时针旋转请按如下设置  至此项目创建成功,回到设备连接页面,连接你的小车蓝牙  进入专业调试运行你创建的项目即可愉快的玩耍了。   刚好手里又有一块ESP32,所以就想着能不能不使用Arduino控制,用ESP32控制,于是。。。。。  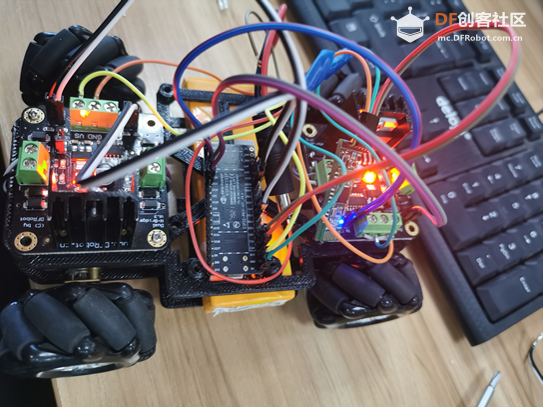 是的这个小车的平台完全支持ESP32控制,至于ESP32的接线I/O口分配大家请看下面这张图。或者程序中都标注的很清楚  下面是一段演示视频 |
WLE 发表于 2021-4-14 16:01 有没有程序和付建啊,l298n和蓝牙模块不会使用 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 ,,,,
,,,,






