|
3026| 1
|
[参赛项目] 创客造|飞行汽车 |
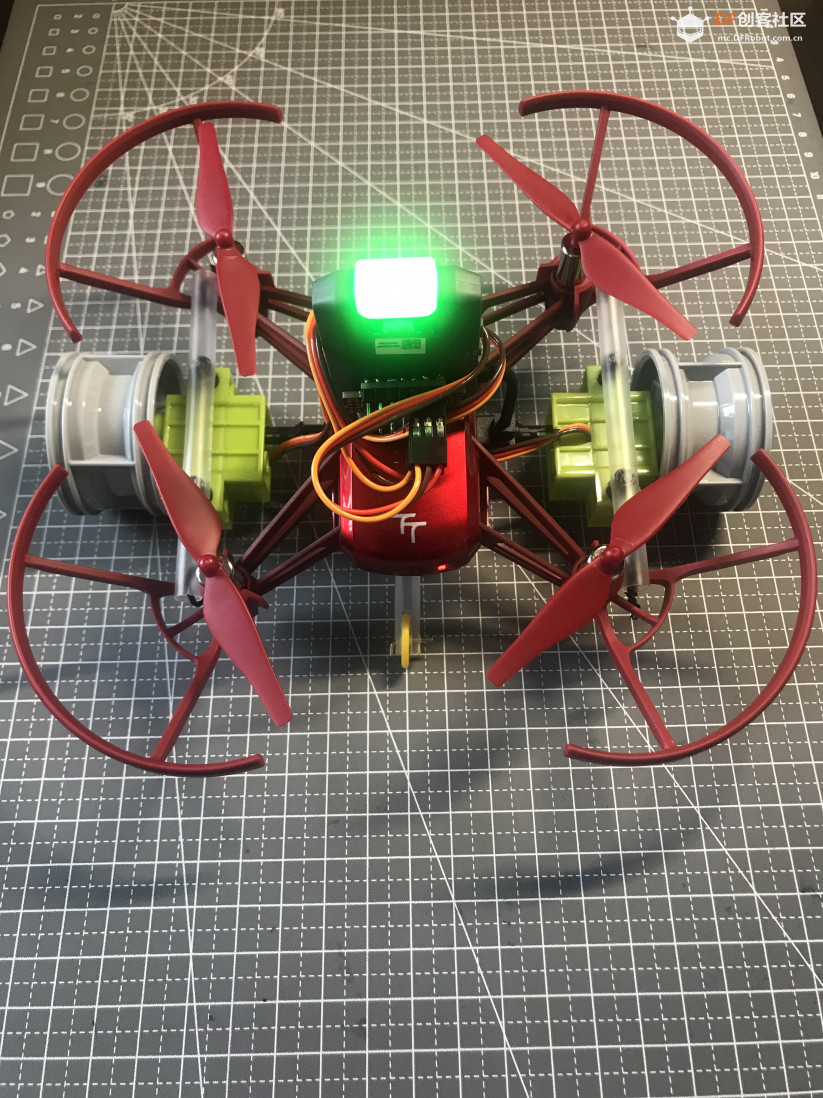 【项目介绍】 上下班早晚高峰的时候,一片红色尾灯看的开车族就头痛。飞行汽车一直是很多开车族的梦。2017年11月,吉利宣布全资收购美国飞行汽车公司Terrafugia(全资收购后,中文名为“太力”飞行汽车)。此时,Terrafugia已推出过两代Transition和TF-X产品。技术最成熟的第二代Transition还被美国航空主管部门允许商业化使用。那么我们搞科创的能不能也设计搞出个样机玩?刚好大疆出了开源教育无人机ROBOMASTER TT,可以让我们一试身手。 【解决方案】 1.基于ROBOMASTER TT增加车辆结构功能,增加的结构都要考虑重量问题。 2.车辆动力两种方案:因为无人机动力不好大改转化为车辆动力,所以有两种想法 1)是用电机,但要电机控制板,会增加重量。2)用360度舵机代替电机。 3.使用blynk作为控制方案。 【作品演示】 【制作过程】--材料清单 ROBOMASTER TT无人机(1台)、ROBOMASTER TT无人机拓展板(1个)、360度乐高舵机(2个)、硬质酸奶吸管(3根)、小轮(1个) 【制作过程】--搭建连接 舵机吊装结构考虑到轻量化,采用硬质酸奶吸管,量好尺寸在吸管上扎4个洞,中间两个要吊装360度乐高舵机,要钻大点,舵机和吸管用乐高连接零件插上。外面两个孔用那种包装的塑料铁丝绑扎在浆叶保护罩的根部。  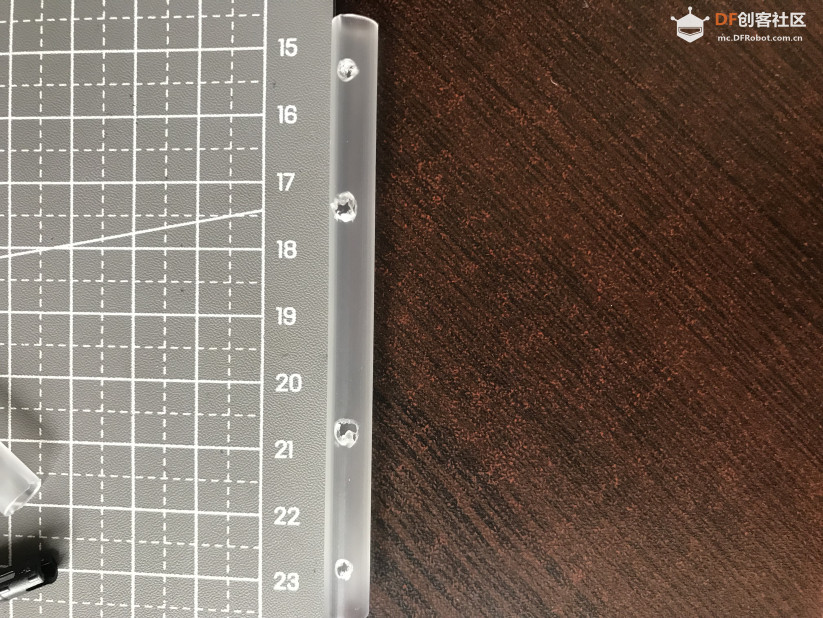 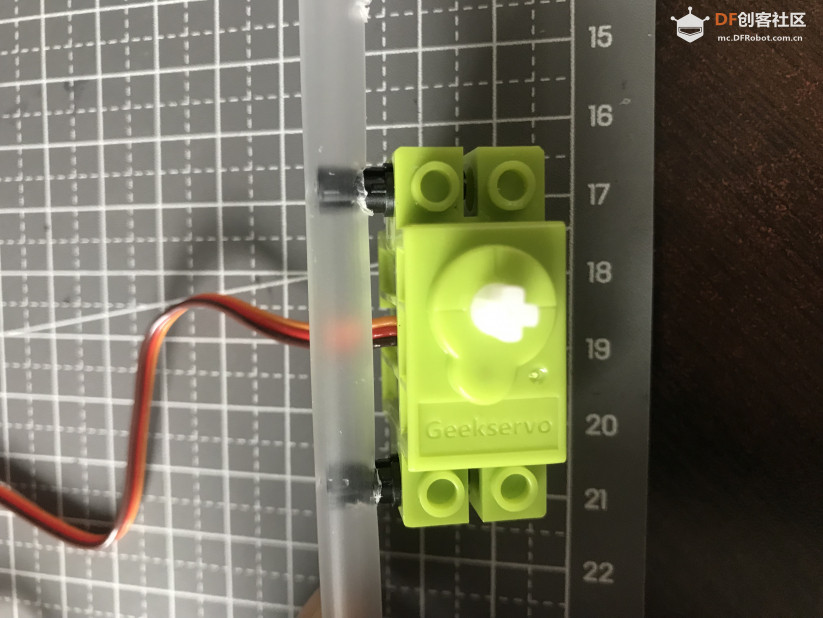 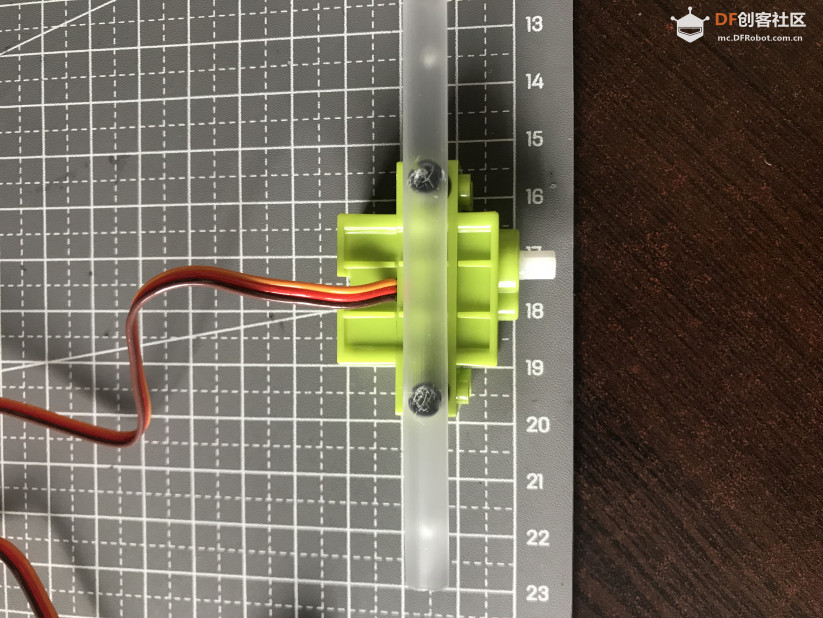 轮子采用乐高的汽车轮子,后来测试太重飞不起来,把轮胎皮去掉减重。  由于吸管是圆的,所以舵机会左右晃动,所以用乐高结构增加一个横向结构加固固定。中间用吸管和一个小轮子做个支撑轮结构,下面用舵机线垫一下,刚好翘起一定角度。 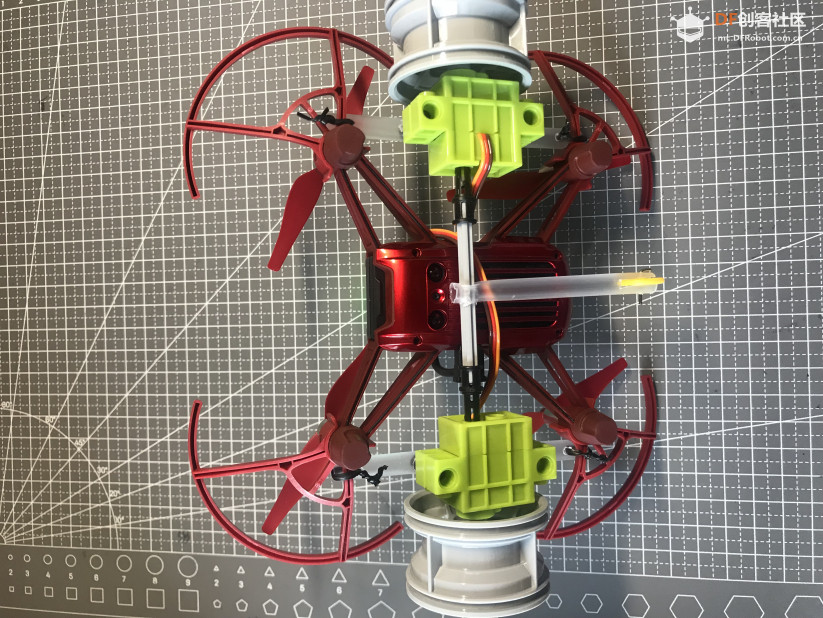 ROBOMASTER TT无人机拓展板上I26、I13靠近电源可以用作PWM控制舵机接口,开始时没注意犯错了,这个电源和普通舵机的口子刚好相反,开始接上导致正负反了,舵机和控制板巨烫,控制板也读不出来了。拔下之后还好没事。所以360度乐高舵机的舵机接头要跳线,要么用杜邦线跳线,考虑减重,直接把原来头子跳线。但记住以后舵机如果拆做他用记得把线跳回来,不然接到正常舵机接线口子又要烧掉。舵机绕线在扩展板上,记得不要让桨叶打到。  最后组装如下: 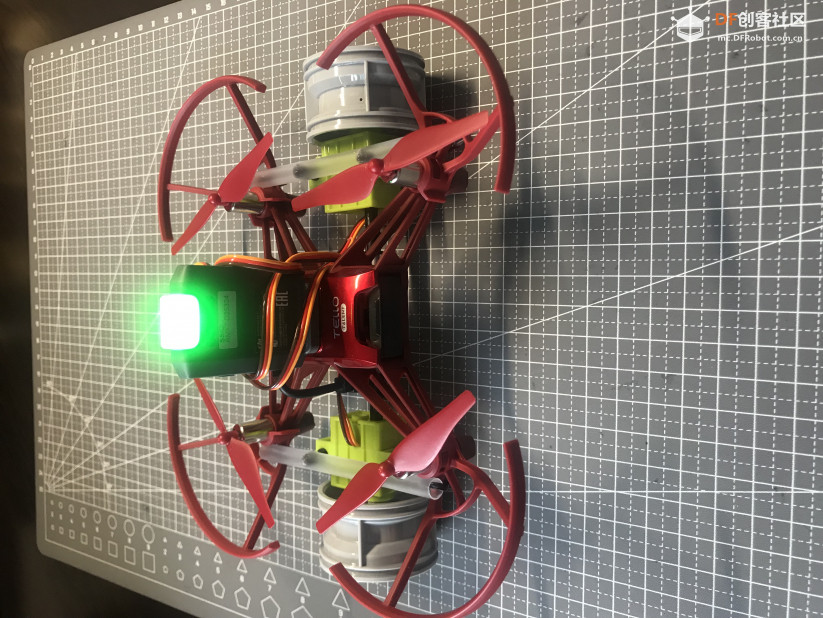 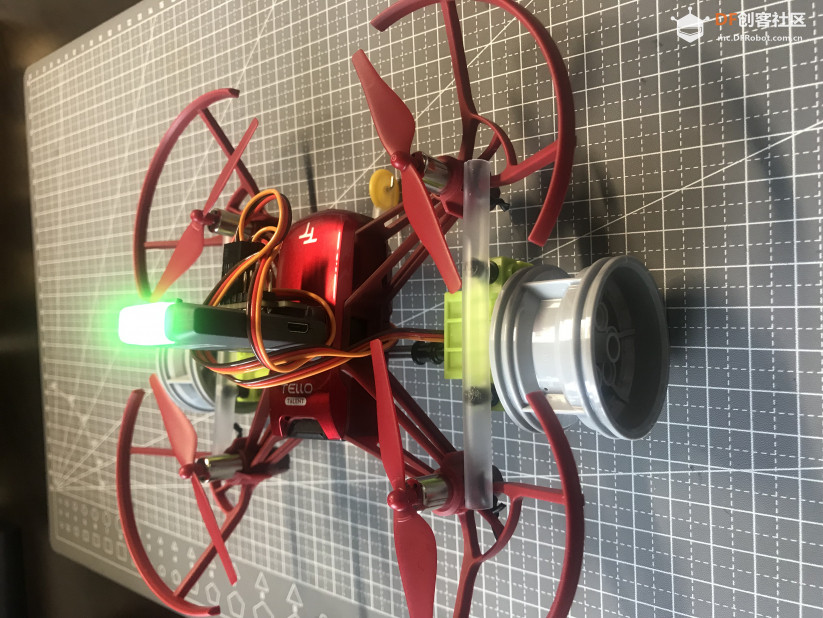 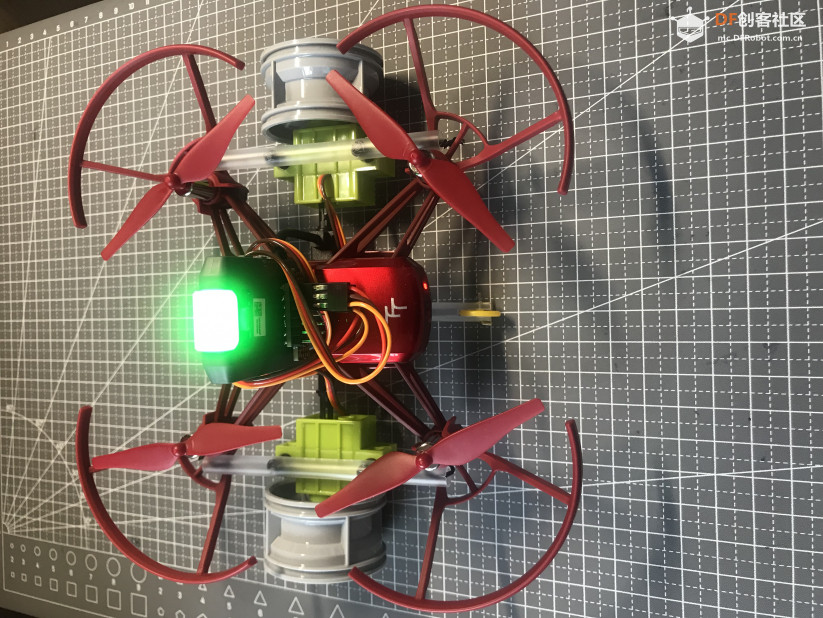 【制作过程】--编程 编程思路采用了blynk蓝牙模式来控制,参考了铁熊老师的TT无人机帖子,具体分了几块功能:起飞、降落两个按钮功能,飞机模式下的:上下左右转摇杆、前后左右移动摇杆,车辆模式下的:前后移动、左转右转、停止,失联状态下的紧急降落。具体代码里面注释的比较清楚。ROBOMASTER TT的相关控制可以参考前不久<ROBOMASTER TT 无人机编程教学开发大赛>,里面有详细的课程介绍大家可以熟悉。 增加了车辆方面的控制。这里由于ROBOMASTER TT暂时不支持360度舵机,目前只支持180度舵机。一种方法是直接开发个360度舵机的库使用。另一种是直接使用这个180度舵机的来控制。直接开发库需要一定的基础,这里讲下这个180度舵机的模块怎么直接用到360度舵机上。我们知道Arduino的<servo.h>库提供write()和writeMicroseconds()控制舵机,这两个函数都可以控制360/180这两种舵机。servo.write(x)通过x设定舵机的速度(0代表一个方向的全速运行,180代表另一个方向的全速运行,90则不动)。而mind+后台也是arduino c。所以我们尝试在180度舵机的图形模块填上角度,测试下来0和180度是360舵机两个正反方向的最大转速,90度是停止360舵机,有了这个知识就能把360舵机当做电机用了,还省了一块电机控制板和更多的连接线。 具体程序如下:  手机上blynk设计界面:3摇杆,2个无人机摇杆,1个汽车摇杆  【项目总结】 本项目实现了实现了飞行汽车的功能,具有飞行和陆地通行的双重功能,使得青少年能从感性和理性方面接触到飞行汽车,积极参与到未来的无人汽车设计开发当中来。 头脑风暴一下后续还可以进行的改进,如: 1.为了减重,可进行优化:3D打印轻量化的舵机固定结构、打印类似月球车的网状轮、去掉浆叶保护罩、选用更小的360度舵机。 2.增加水上航行功能:增加两个浮桶、一个360度舵机。 3.增加其他传感器,这取决于ROBOMASTER TT无人机还能承载多少额外的重量。 【代码附件】 |

2.78 MB, 下载次数: 4294
 创客造
创客造



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







