|
6410| 1
|
[项目] Beetle 树莓派RP2350测评2:电动绑带鞋 |
|
本帖最后由 Anders项勇 于 2025-5-17 22:01 编辑 【项目背景】 这是Beetle 树莓派RP2350的第二篇测试。nike曾经出过一款电动绑带鞋Nike Adapt BB,很是火爆,价格曾经从两千多炒到八千多。这款鞋是靠按钮或手机来控制松紧,还带无线充电。这次我计划用RP2350来做电动鞋带系统,不用按钮控制,用手势传感器来控制鞋带的松紧。之前我用esp32做过一个,这次试试看RP2350是不是更好胜任这个项目。  【硬件介绍】 Beetle RP2350可穿戴嵌入式开发板是一款基于Raspberry Pi RP2350微控制器的高性能迷你开发板,专为嵌入式开发、物联网设备和可穿戴应用设计。其独特的双核双架构设计(支持 Arm Cortex-M33或Hazard3 RISC-V内核)为开发者提供灵活的性能配置。其小巧的尺寸(25mm x 20.5mm,约硬币大小)和高度集成的设计,使其成为对空间和便携性要求高的嵌入式应用和可穿戴设备的理想选择。 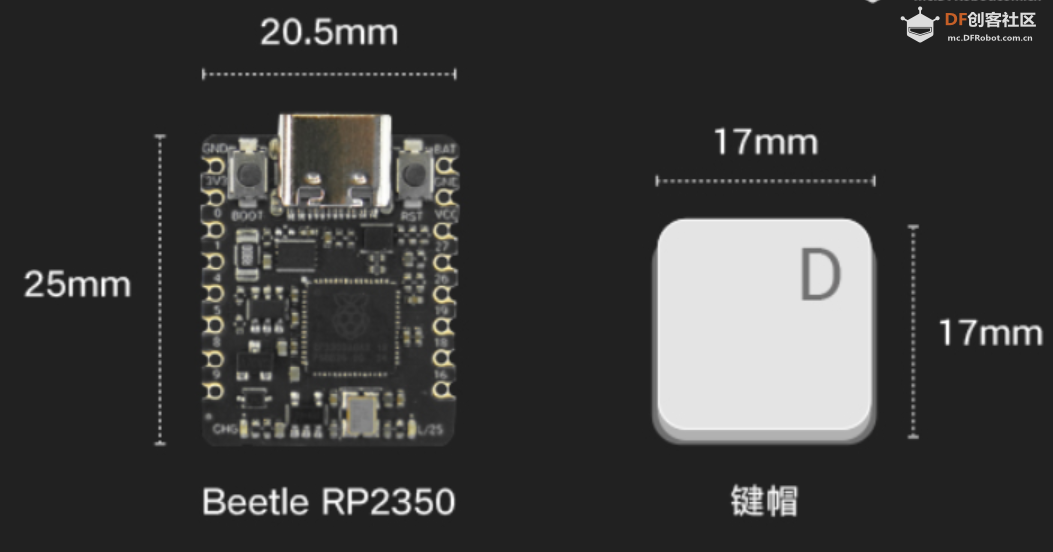 【方案设计】 设计思路:对手势传感器检测到的手势信号进行判断,控制360度舵机的正转、反转、停止等动作。 其他硬件:PAJ7620U2 Gesture Sensor 手势传感器、360度舵机。其中采用360度舵机是为了省掉一个电机控制板,缩小占用空间。 PAJ7620U2 Gesture Sensor 手势识别传感器是一款强大的3D手势识别交互式传感器;在最远20cm范围内,最多可以识别13种手势。目前有两种工作模式:高速模式下可以识别手的上\下\左\右\前\后\顺时针\逆时针移动以及快速挥动9种手势;低速模式下可以此前9种基础上再加乱序\缓慢左右\缓慢前后\缓慢上下移动4种手势。使用I2C接口。 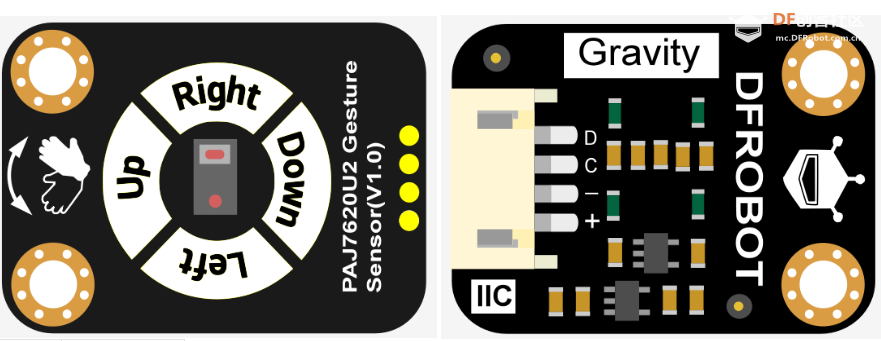 【制作过程】 1.硬件连接: 我们使用I2C接口连接PAJ7620U2 Gesture Sensor 手势识别传感器和RP2350,然后再接一个360度舵机。  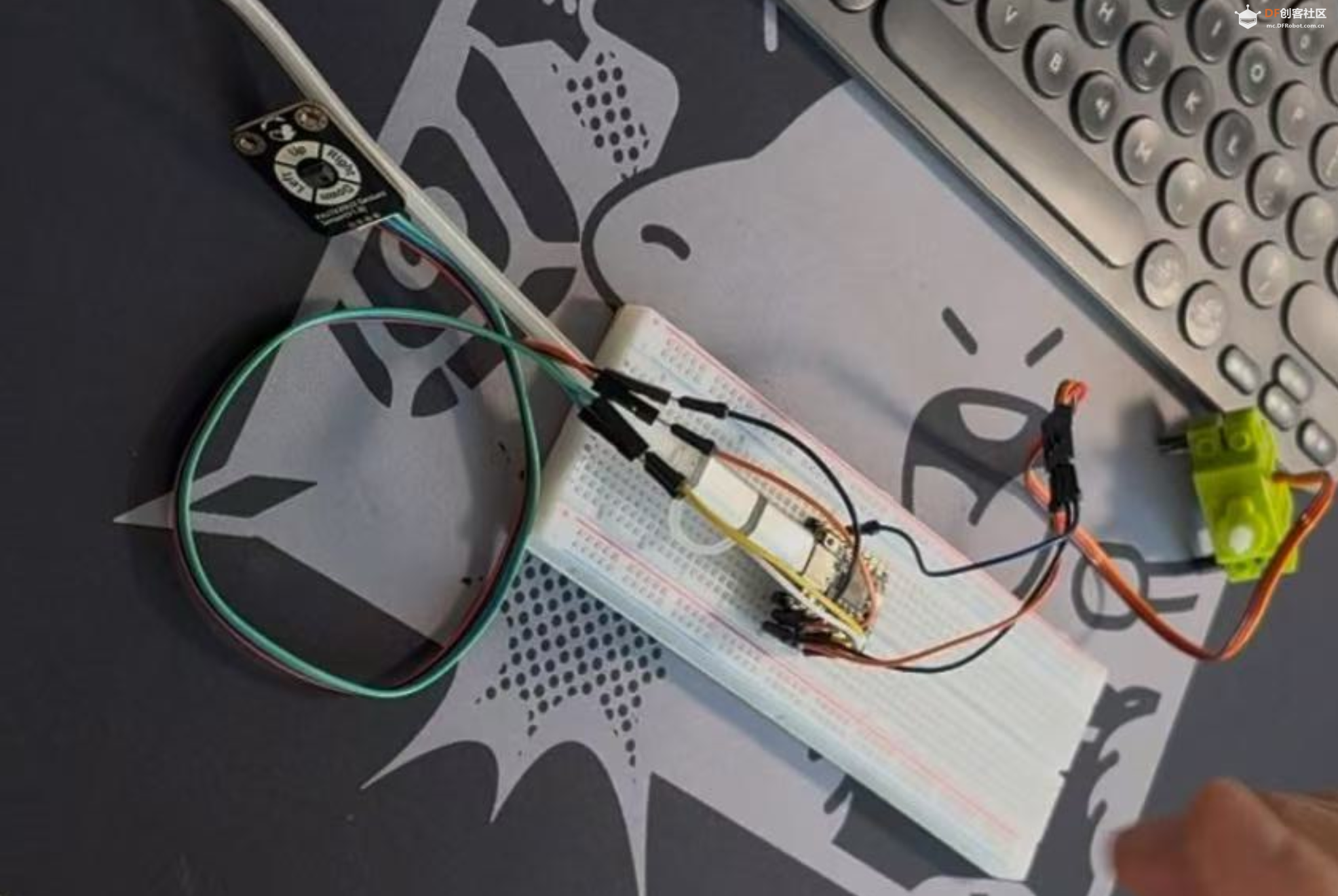   2视频演示: 3.RP2350Arduino编程: 程序逻辑:对手势传感器检测到的手势信号进行判断,控制360度舵机的正转、反转、停止等动作。 #include <Servo.h> #include <DFRobot_PAJ7620U2.h> Servo myservo; DFRobot_PAJ7620U2 paj; void setup() { Serial.begin(115200); delay(300); Serial.println("Gesture recognition system base on PAJ7620U2"); while(paj.begin() != 0){ Serial.println("initial PAJ7620U2 failure! Please check if all the connections are fine, or if the wire sequence is correct?"); delay(500); } Serial.println("PAJ7620U2 init completed, start to test the gesture recognition function"); paj.setGestureHighRate(true); myservo.attach(D26); // 连接数字引脚D26 myservo.write(90); // 初始停止 } void loop() { DFRobot_PAJ7620U2::eGesture_t gesture = paj.getGesture(); if(gesture != paj.eGestureNone ){ String description = paj.gestureDescription(gesture); Serial.println("--------------Gesture Recognition System---------------------------"); Serial.print("gesture code = ");Serial.println(gesture); Serial.print("gesture description = ");Serial.println(description); Serial.println(); } if (gesture == 64) { //顺时针紧鞋带 myservo.write(0); } else if (gesture == 128) { //逆时针松鞋带 myservo.write(180); } else if (gesture == 16) { //下压停止 myservo.write(90); } } 4.扩展: 头脑风暴下后续还可以做以下扩展: 4.1考虑增加多个压力传感器,脚底压力传感来探测脚穿进去了系统从低功耗唤醒,自动触发脚面压力探测压力控制舵机施加鞋带松紧程度,不需要手势来控制了。 4.2增加震动传感、光线传感、光带实现夜间跟随步伐节奏发光。 4.3交友模式,增加蓝牙模块,加载特定掩码的蓝牙信号激活传感带动灯带。你周边穿一样鞋子的朋友靠近你就会激活你鞋子的灯光,促进社交。 4.4增加蓝牙模块手机进行控制模式转换、松紧等,通过蓝牙上传步数、步态、压力对比专门的步态模型进行分析,纠正错误走路姿势。 |
 创客造
创客造



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






