|
9753| 8
|
[漂移驴车项目] 提速秘诀-用RC遥控器驾驶驴车 |
|
本帖最后由 昊男Henry 于 2022-3-10 22:58 编辑 最近大野牛老师反馈用PS2手柄遥控不顺手,所以和他一起摸索,调通了RC遥控器控制。没想到,除了小车遥控手感更加细腻,自动驾驶的效果也有明显提升。从小车跑圈成绩看,原来跑三圈需要33'37'',而换成RC遥控后只要19'69'',时间缩短了40.9%,简直是开挂神器有没有。 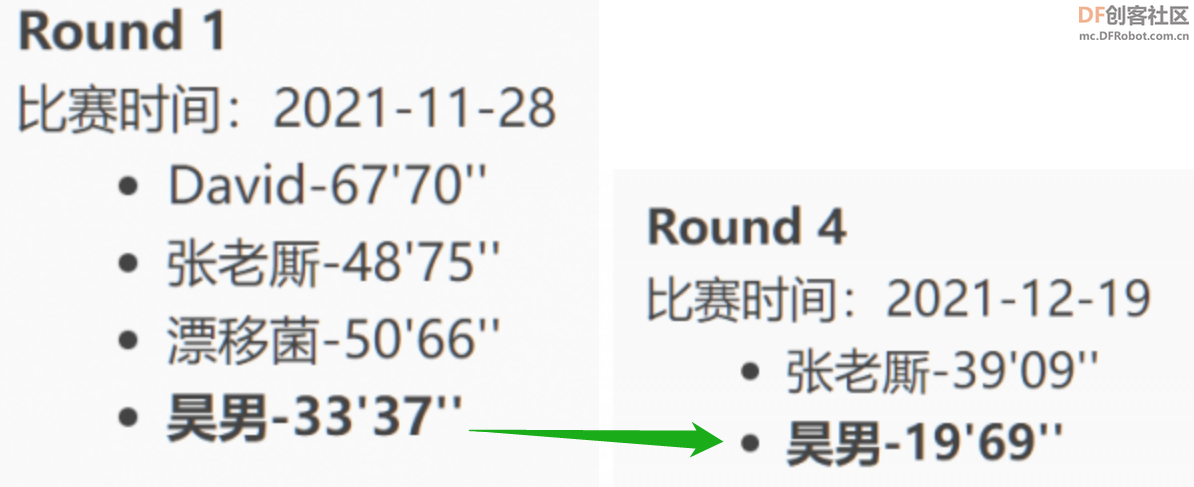 秉着“好东西都要分享”的老驴精神,我翻译并优化了官方教程:https://docs.donkeycar.com/parts/rc/,欢迎大家参考! ----------------------------------------------------------------------------------------------------------------------- RC控制程序 (这仅适用于RaspberryPI。Jetson Nano的GPIO引脚不支持该功能)。 你可以用RC控制器来驾驶驴车!秘诀在于,多亏了酷炫的Pigpio库,RaspberryPI引脚可以读取并生成读取RC接收器和驱动伺服和电机控制器所需的RC信号。 要做到这一点,你需要连接一些跳线电缆从你的RC接收器到RPI GPIO引脚,然后为你的转向伺服和电机控制器做同样的事情(它有点麻烦,但工作很好) 注意:RC控件目前仅在Dev分支中受支持。要使用它,需要执行一下操作,按照相关程序:
----------------------------------------------------------------------------------------------------------------------- 硬件设置 您可以将GPIO引脚用于RC输入。在RC输入的情况下,RC控制器替换蓝牙操纵杆。 连接RC需按照以下布线指南来做。请记住,您只需将一根接地和V+电缆连接到RC接收器(在任何通道上),而不是每个通道都连接一根。 还请注意,RC接收器应连接到3.3V引脚。 警告:RC接收器PWM信号是由接收器输入电压产生的,因此将RC接收器连接到电调ESC的5V甚至6V将会烧毁树莓派! 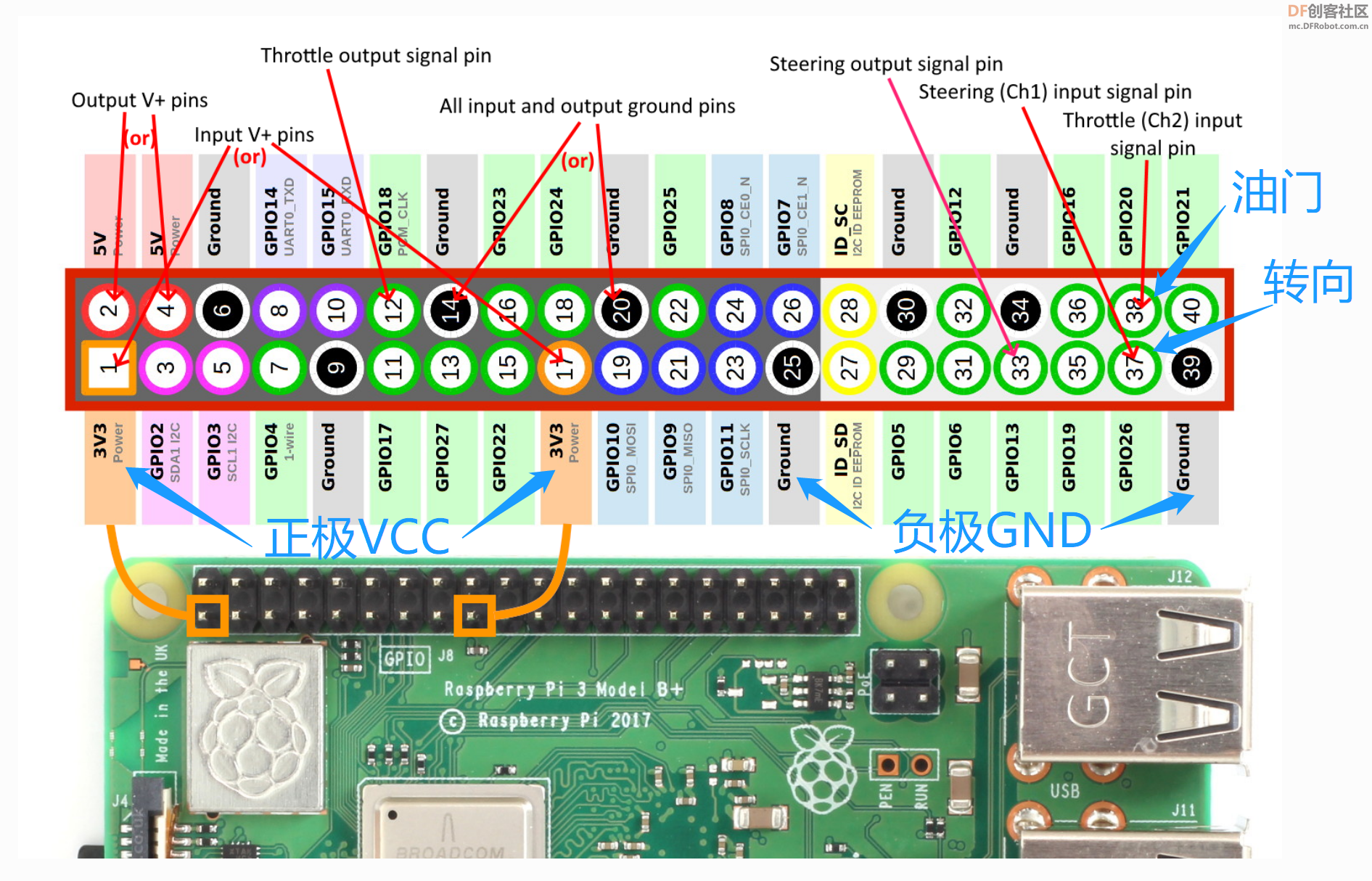 下面是RC接收器接线的样子  ----------------------------------------------------------------------------------------------------------------------- 软件设置 首先,在命令行中输入以下命令,将PIGPIO守护进程设置为始终在启动时运行: 接下来,在mycar 目录中,编辑myconfig.py文件,如下所示:
最后,将以下配置加入myconfig.py中实现更多功能,例如反转输出方向或连接的端号:
----------------------------------------------------------------------------------------------------------------------- 使用流程 第一步,在树莓派上连接好RC手柄的接收机,并打开RC手柄电源。 第二步,通过以下命令启动小车,注意添加“--js”后缀启用RC手柄控制: 第三步,donkeycar程序启动后,测试RC手柄的转轮是否能控制方向,测试RC手柄的扳机能否控制油门。  如果方向或油门反了可以在手柄上通过“方向开关”实现换向。  (注意:第一次使用需要配对手柄和接收机。即:先关闭手柄电源,长按接收机天线一侧的小按钮直至指示灯闪烁,然后再打开手柄电源,指示灯常亮后说明配对成功) 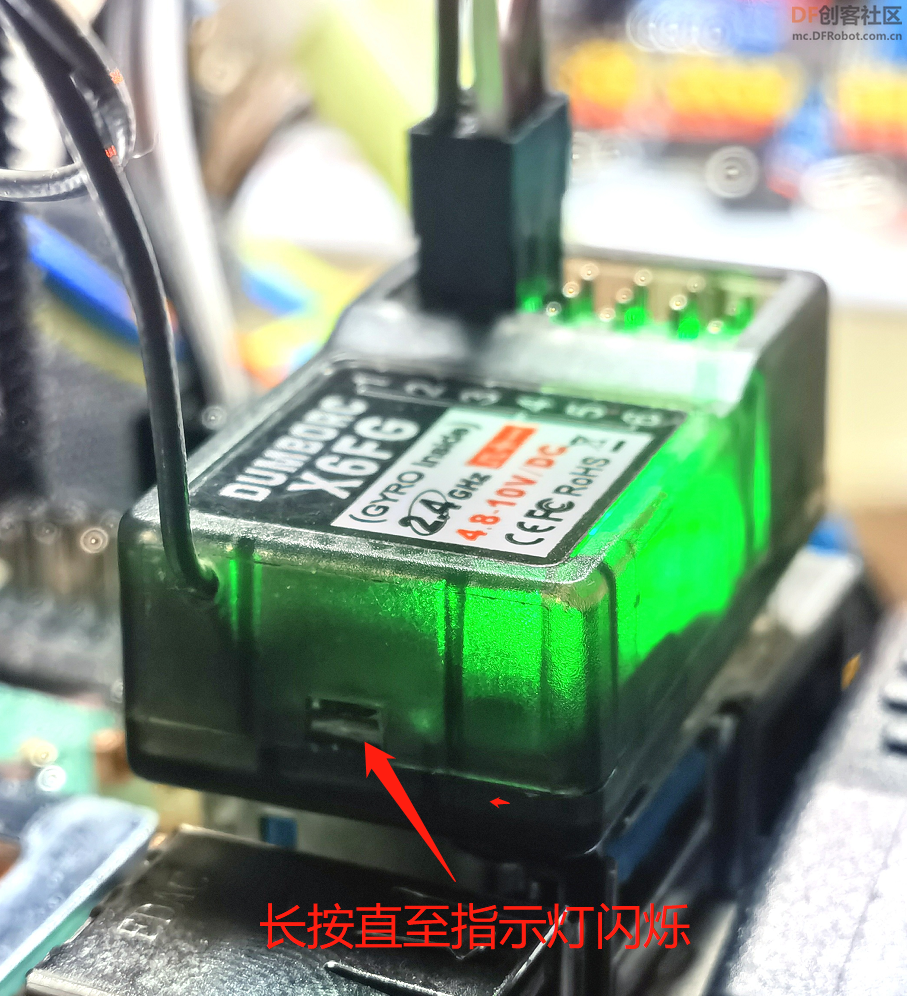 第四步,通过RC手柄的两个“中位旋钮”,分别校准油门中位和方向中位。做到扳机在中间时,车轮保持不动且没有自动拍照。做到转轮在中间时,小车能走直线。  第五步,遥控小车在赛道上开,采集5000组左右的驾驶数据。建议:通过网页端的摄像头实时画面,判断周围环境光是否过亮或过暗并做出调整。 如果油门太大或转向角度不足,都可以通过RC手柄的两个“比例旋钮”,分别调整油门和转向的最大范围。  (此处省略自动驾驶模型的训练过程) 第六步,小车自动驾驶的模型训练生成后,通过以下命令启动小车(mypilot.h5模型文件的路径和名称,请按实际情况替换): 第七步,从同一个网络下,登录驴车IP地址的8887端口,通过“Mode & Pilot”选项切换驾驶模式。 User:用户手动驾驶; Local Pilot:完全自动驾驶,小车同时控制方向和速度; Local Angle:半自动驾驶,小车只控制方向,速度需要用户从网页控制。 (注意:此时RC手柄是无法使用) 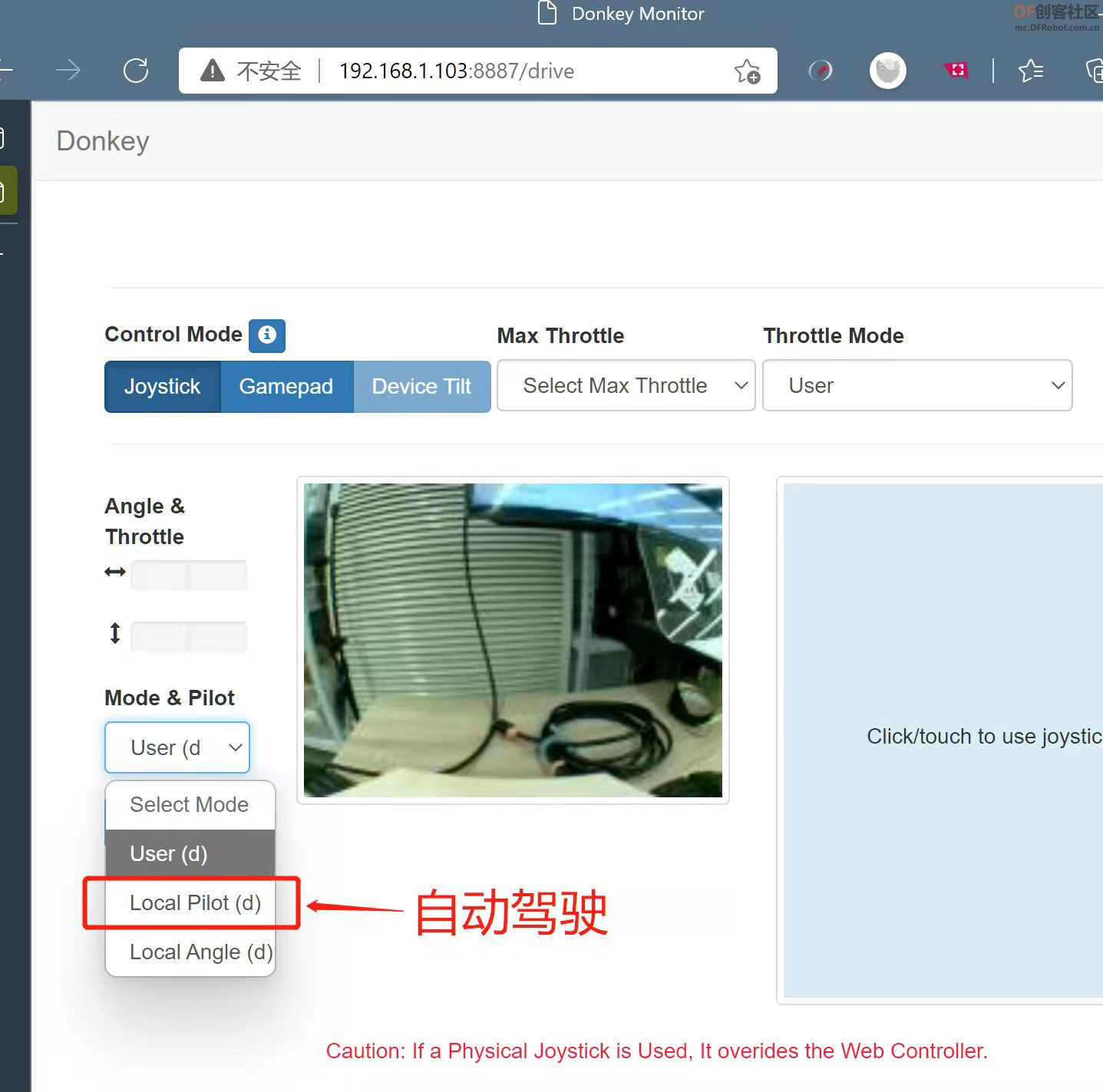 至此,小车应该已经可以比较顺畅地自动跑起来。 有任何问题,都欢迎跟帖留言。祝各位驴友玩车愉快! |
|
本帖最后由 昊男Henry 于 2021-12-28 23:07 编辑 为确保大家的使用体验,已亲测这款RC手柄。 六通道,带陀螺仪,可玩性和性价比都很高,推荐! 采购链接: https://m.tb.cn/h.fjP6f2E?sm=616f35  另外,考虑到部分驴友可能没有杜邦线和端子头,以下采购链接欢迎参考:
  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








