|
43028| 14
|
[入门教程] 视觉追踪小车 |

|
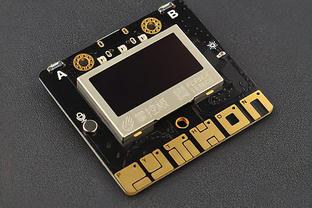
本帖最后由 gray6666 于 2022-3-14 17:44 编辑 一、项目起源 高中新课改开始将近2年,实验室建设标准依然没有确定,课堂中项目的实验设备依然短缺;偶尔需要演示视觉处理,机器学习案例;面对云机房虚拟环境,没有显卡,1G内存,飘忽不定的网络,学生只能眼巴巴的看着老师。上周面对漫天飞涨的树莓派,microbt,我默默地拿起了久违的掌控板和大斧头做的小车+吃灰的MU处理器(内置的深度学习引擎可以识别多种目标物体,例如颜色检测,球体检测等。检测结果可以通过 UART 或 I2C 进行输出,体积小巧,功耗低,所有算法本地处理,无须联网)。做个视觉追踪小球的运动小车,简单、直观、上手无障碍。 二、设备清单 1.掌控板*1 https://www.dfrobot.com.cn/goods-1902.html 2.大斧头扩展板*1 (前期活动的奖品) 3.MU视觉处理器 *1 https://www.dfrobot.com.cn/goods-2003.html 4.小车底盘+麦克纳姆轮4个 *1 5.7.4V电池一块6.绿色网球或桔红色小球 三、功能实现 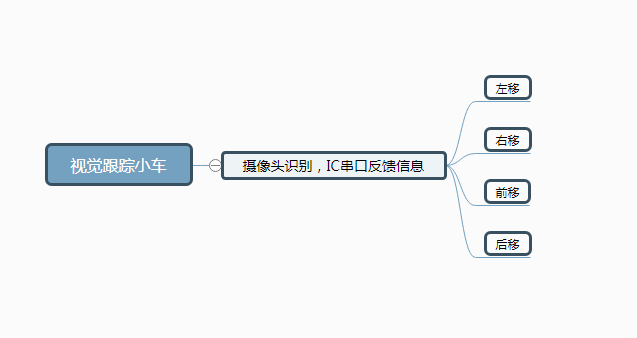 四、程序实现 1.初始化MU视频处理器  2.检测X轴,根据小球位置,下车左右移动  3.检测小球外形宽度值,近大远小,小车进行前进后退动作 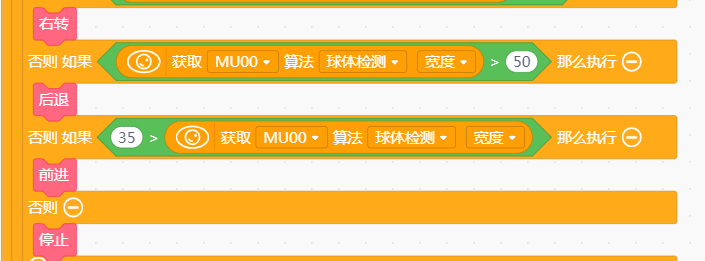 4.电机驱动函数,其他几个类似 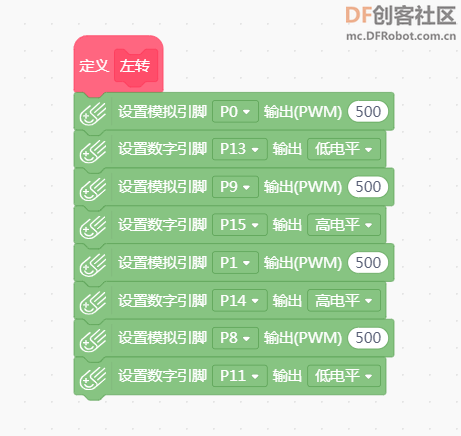  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






