|
28031| 0
|
[进阶] LabVIEW控制Arduino实现舵机联控(基础篇—9) |

|
本帖最后由 不脱发的程序猿 于 2022-5-27 21:26 编辑 本篇博文将通过LabVIEW和Arduino Uno控制板实现对单个和多个舵机转动角度的控制。 1、控制单个舵机 1.1、实验目的 利用LIAT函数库通过LabVIEW和Arduino Uno控制板实现对单个舵机转动角度的控制。 1.2、实验环境 将9g舵机的电源线分别接至Arduino Uno控制板上的5V和GND引脚上,信号线接至数字引脚D2上,如下图所示: 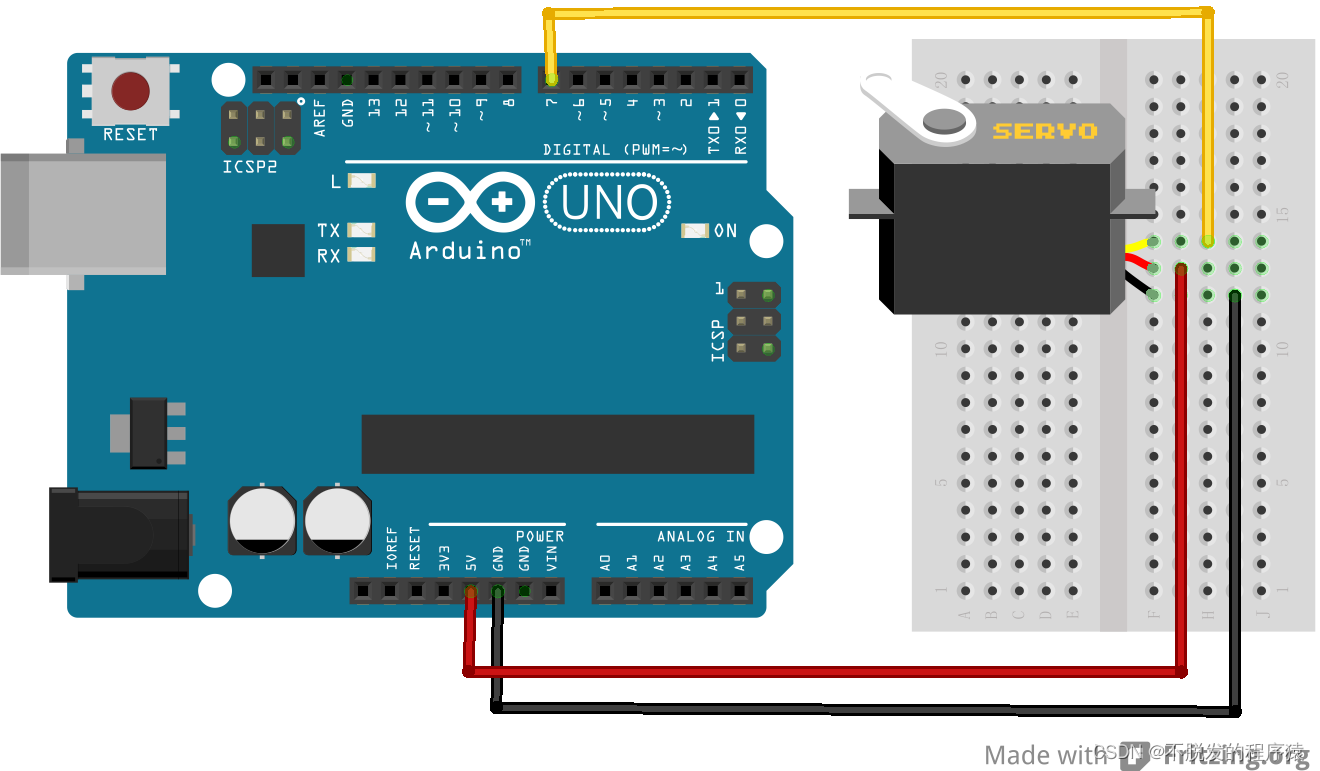 本例修改自LabVIEW lnterface for Arduino函数库中的示例,位于函数选板“函数”→"Arduino"→"Example" "Servo Example",修改后的LabVIEW前面板如下图所示:  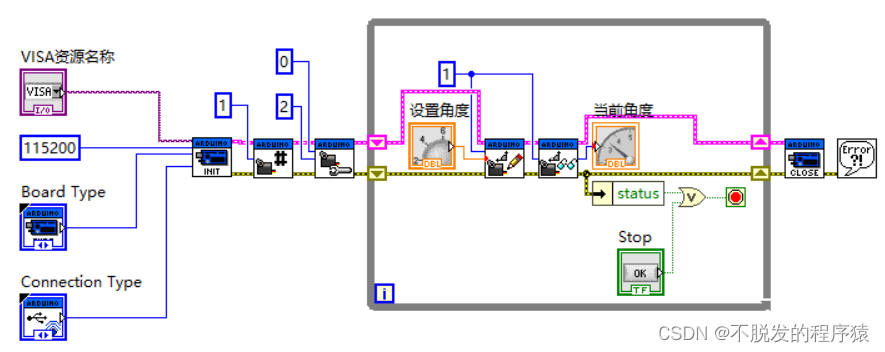 1.4、实验演示 点击运行按钮,LabVIEW程序开始执行,通过调节设置角度的旋钮,可以看到舵机随着角度的改变而转动,同时,当前角度值也随着舵机的转动而实时改变。 资源下载:LabVIEW控制Arduino实现舵机联控-单片机文档类资源-CSDN下载 2、控制多个舵机 2.1、实验目的 利用LIAT函数库通过LabVIEW和Arduino Uno控制板实现对多个舵机转动角度的控制。 2.2、实验环境 实验环境和控制单个舵机方法类似,将两个9g舵机的电源线分别接至Arduino Uno控制板上的5V和GND引脚上,信号线分别接至数字引脚D2和D3上。 2.3、程序设计 本例修改自LabVIEW Ilnterface for Arduino函数库中的示例,位于函数选板“函数”→"Arduino"→"Example"→"Servo Example",修改后的LabVIEW前面板如下图所示:  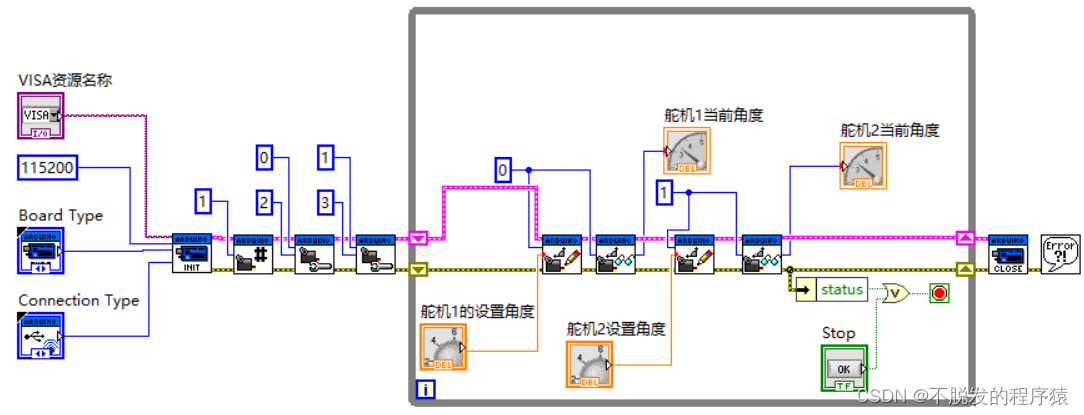 2.4、实验演示 点击运行按钮,LabVIEW程序开始执行,通过舵机1和舵机2的调节设置角度旋钮,可以看到舵机1和舵机2随着角度的改变而转动,同时,舵机1和舵机2的当前角度值也随着舵机1和舵机2的转动而实时改变。 资源下载:LabVIEW控制Arduino实现舵机联控-单片机文档类资源-CSDN下载 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






