|
10343| 0
|
[高级教程] 【N+】千里马Plus项目式课程 - 01 初识千里马 |
|
本帖最后由 Nplus实验室 于 2023-4-3 10:34 编辑 【N+】千里马Plus项目式课程 01 初识千里马 - N+桃李科教 上一篇:【N+】千里马Plus项目式课程介绍下一篇:【N+】千里马Plus项目式课程 - 02 循迹行驶 教学目标 1.认识千里马; 2.了解千里马组成与功能; 3.学习烧录千里马的掌控办与AI固件; 4.学习使用程序控制千里马轮子的转动。 教学准备 千里马、数据线 教学过程 导入 → 认识千里马 → 软件下载与安装 → 软件界面介绍 → 固件的烧录与更新 → 电量获取 → 驱动电机 → 总结 1.导入千里马 (1)千里马是什么? 千里马真的是一匹马吗?当然不是,千里马是一辆AI智能小车,拥有强大的功能,能跑能唱,还有一双火眼精金呢。 (2)千里马可以干什么? 观看视频千里马的视频《千里马Plus》 总结:千里马可以实现巡线、避障、颜色识别等功能,由于内置k210芯片以及摄像头,可以实现人脸识别、二维码识别、手势识别、语音识别等AI功能。 2.参数介绍 千里马有这么多功能,那么它是由哪些器件组成的呢? 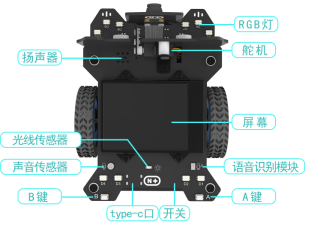 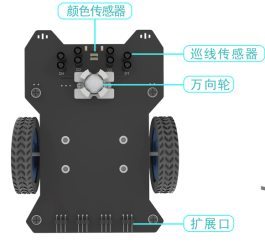 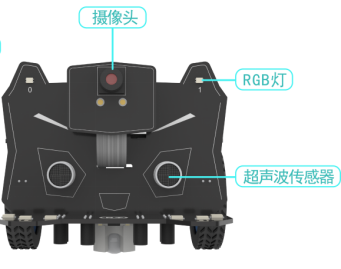 3.软件下载与安装 千里马已经有了,怎么控制它根据我们的想法运动呢?这时就需要编程了,也就需要编程软件了,课程中使用的是“mPython”编程软件。 mPython是一款对掌控板支持非常友好的编程软件,它可以让用户从图形化编程入手,进而掌握python语言。mPython 还包含了硬件编程、Python、jupyterlab 三种模式。全环境自动安装,Python 扩展库一键安装,microPython 到Pyhont 无缝迁移,内置多种示例程序,方便快速入门。 3.1软件下载 1.打开浏览器,在百度搜索中输入“盛思”,搜索结果点击前面两个均可。  2.在“装备”一栏选择“mPython”。  3.这里有“软件下载”与“在线编程”两个选项,因为我们是要长期使用,所以选择“软件下载”。  4.选择合适的版本进行下载。  3.2软件安装 1.鼠标双击软件图标。  2.出现页面后点击“下一步”。 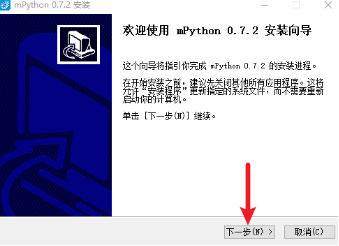 3.可以自主选择安装文件,也可以选择默认,然后点击“下一步”。 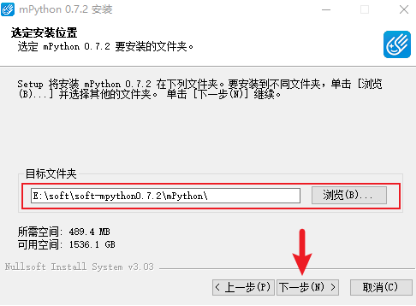 4.选择覆盖安装,然后点击“下一步”。  5.点击“安装”,安装过程中会出现安装界面。 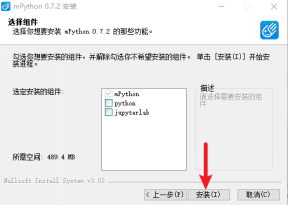 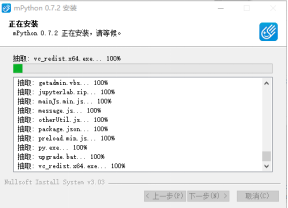 6.安装过程中,将会出现下面界面,点击“下一步”即可。  7.选择“我接受这个协议”,再点击“下一页”。  8.点击“完成”。  9.若出现下面这个界面,点击关闭即可。  10.出现驱动安装界面后,点击“安装”,安装成功后,点击“确定”。   11.回到软件安装步骤,点击“下一步”,点击“完成”后,软件便安装成功了。   3.3模块导入 1.打开mpython软件,点击扩展部分的添加。 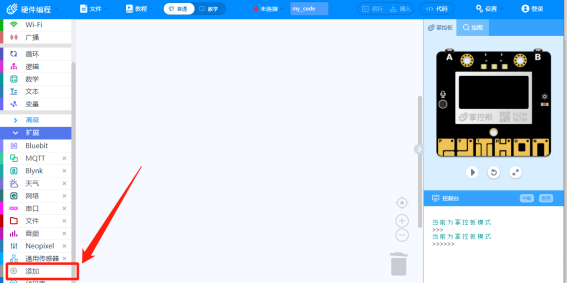 2.在“套件”一栏,添加“N+产品”模块即可。  3.N+下拉菜单有四个模块,如下图所示,本教程使用较多的是“千里马”模块。  4.固件更新与烧录 4.1开机与充电 千里马按键、充电口等操作基本都在背部,具体如下图所示: 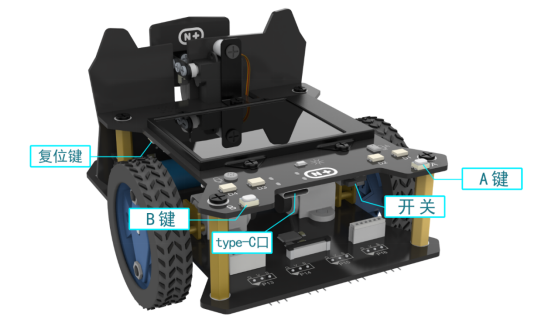 1.开机:开关从左侧滑向右侧(ON),便能开机,开机后等待一会,屏幕会亮起来,出现摄像头的内容,则表示开机成功。 2.充电:关机状态下,数据线连接千里马的type-c口,便可充电了,关机状态下只能充电,不能刷入程序。 4.2连接 1.数据线连接千里马的type-c口与电脑的USB接口。  2.当软件上方的“未连接”变为“已连接”,说明连接成功。   3.点击上方的“刷入”,即可将程序烧入到千里马中(千里马必须处于开机状态)。 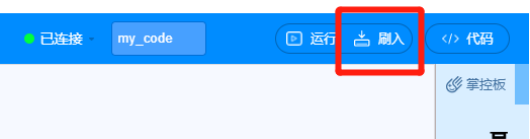 4.3固件烧入 千里马本因为存在两个芯片,所以需要烧录两个不同的固件,一个是主板的固件,还有一个是千里马的AI固件。视觉相关功能是由千里马AI固件控制的;而声音传感器、光线传感器、RGB灯、舵机等就是由主板固件控制。 左侧轮子边上有一个开关,烧录不同的固件,开关拨动的方向是不同的,靠近车尾那一端有一个“三角形”的符号。  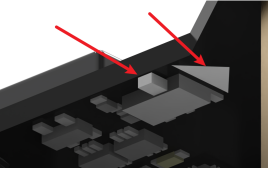 4.3.1固件下载 提取码: 8888 也可以使用扫描下面二维码进行下载,进入链接后,是两个文件夹。   4.3.2主板固件 1.下载主板固件。  2.将左侧轮子的开关拨动至没有三角形符号的一端,此时烧录的就是主板固件。 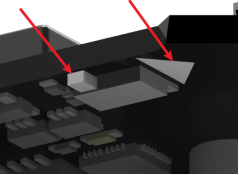 3.打开千里马的电源开关,并使用数据线连接千里马和电脑。 4.打开“mpython”软件,当软件上方出现  之后,点击右上方的“设置”,然后“烧录固件”,点击自定义固件,选择下载的主板固件,然后点击确定,静静等待它烧录,大概1分钟左右,烧录过程不可将数据线拔了或关闭软件等操作。 之后,点击右上方的“设置”,然后“烧录固件”,点击自定义固件,选择下载的主板固件,然后点击确定,静静等待它烧录,大概1分钟左右,烧录过程不可将数据线拔了或关闭软件等操作。   4.3.3 AI固件 1.下载AI固件和烧录软件,“AI固件”的文件夹中,第一个是烧录软件,还有一个是固件文件。   2.下载下来软件包进行解压。 3.打开“软件”文件,再打开“kflash_gui”文件夹,双击下面图标,打开软件。 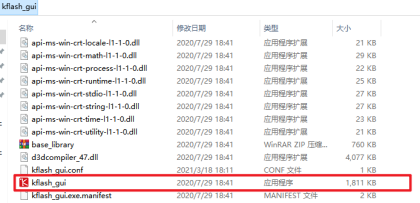 4.将左侧轮子的开关拨动至三角形符号的一端。 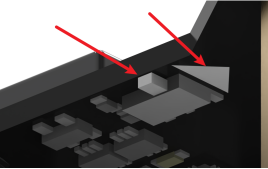 5.软件打开后,单击“打开文件”,选择下载的AI固件文件;  6.数据线连接上千里马的充电口,打开千里马的开关。选择端口:可以拔了千里马的数据线,消失的那个端口就是千里马的,然后再插上数据线,选择刚刚消失的端口。  7.核对其他参数是否对的上,最后点击“下载”,接下来就是等待了,程序烧录过程3-5分钟左右,需要耐心等待,注意不要勿拔数据线。 5.程序编写 5.1电量获取 可以通过程序,获取千里马的电量,电量最高时大概在4000左右,一般低于2500时,就需要充电了,否则会出现屏幕显示异常、马达不转动、识别错误等情况。 获取千里马电量需要用到的程序语句如下表所示
程序与打印结果如下图所示:   5.2驱动电机 获取千里马电量需要用到的程序语句如下表所示
5.2.1前进与后退 1.前进时电机转动方向选择“正转”,然后再设置速度,左右电机的速度需要一致。  2.后退时电机转动方向选择“反转”,然后再设置速度,左右电机的速度需要一致。  3.停止,可以将速度设为“0”,也可以使用“千里马停止语句”,方向选择正转还是反转都是可以的。  5.2.2左右转弯 千里马转弯是通过速度差来实现的,一种是方向相同产生速度差,另一种是方向相反产生速度差。 (1)方向相同产生速度差 左右两个电机的转动方向一致,但是速度不一样,速度差越大,转弯幅度越大;同时,这种转弯是以速度小的轮子为圆心,转弯后会产生位移。 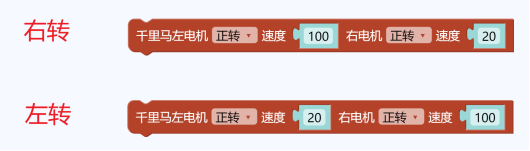 (2)方向相反产生速度差 左右两个电机的转动方向相反,同时速度也不一样,速度差越大,转弯幅度越大;同时,这种转弯是千里马的中心为圆心,转弯后不会产生位移,还停留在原地。  5.3千里马运动 目标:千里马前进2s,后退1s,左转2s,右转2s,停止1s,然后一直在重复执行。 1.执行一次  2.加上循环与初始化  3.使用数据线连接千里马与电脑,刷入程序。 6.总结 1.刷入程序应该注意什么? 2.千里马固件应该怎么烧录?应该注意什么? 3.千里马是怎么实现转弯的? 7.课后作业 1.如果千里马左右电机方向相反,速度一致,会发生什么事? 2.探索两种转弯方式应该什么时候? 千里马Plus购买链接:N+千里马Plus |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






