便携式Linux终端、赛博朋克风无线电、四足机器人…… 看看这周的周刊都有哪些好玩儿的项目!
社区公众号记录每周值得分享的创客相关内容,每周五发布~
内容开源,欢迎投稿或推荐相关内容。
投稿邮箱:MakerCommunity@outlook.com
图片&视频
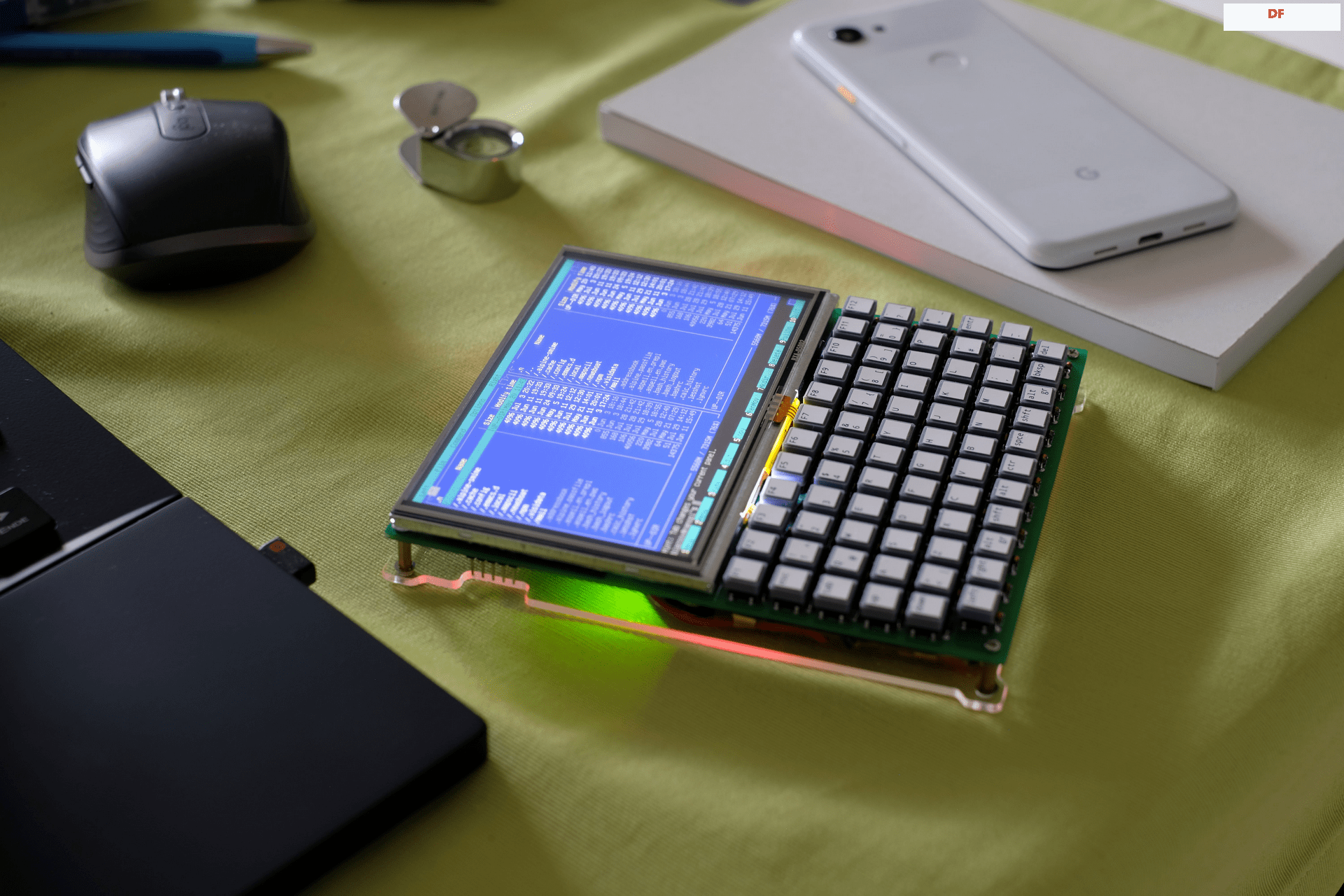
便携式Linux终端——HaLiTerm
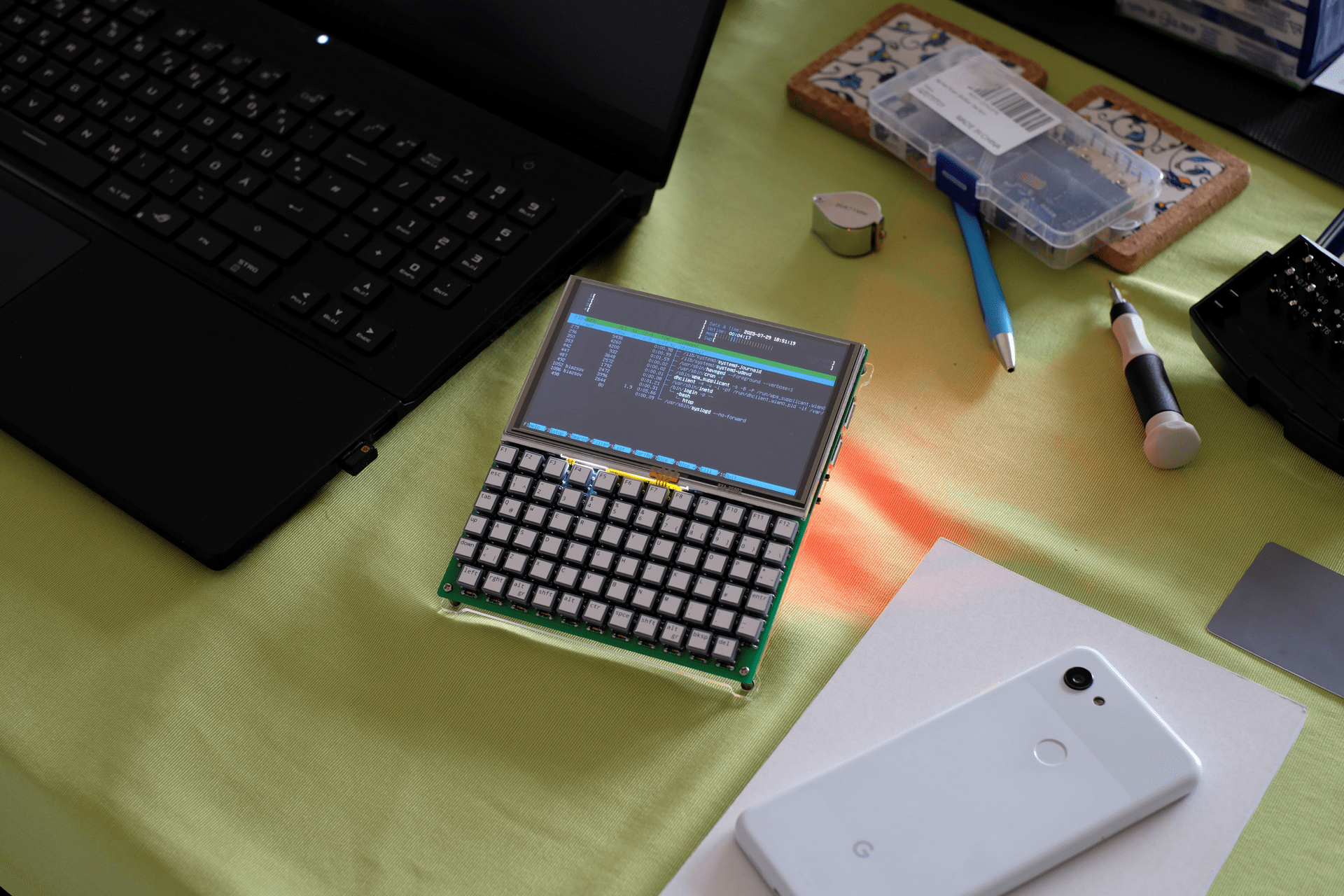
这是一款紧凑型的便携式Linux终端,内置了一块NanoPi Neo Air单板计算机,运行着DietPi Linux发行版。设备通过UART与树莓派Pico连接,Pico再通过SPI与Adafruit RA8875板连接来驱动一个800x480的TFT显示屏。Pico的剩余引脚用于扫描一个71键的键盘矩阵。NanoPi上还通过i2c连接了一个DS3231实时时钟模块。
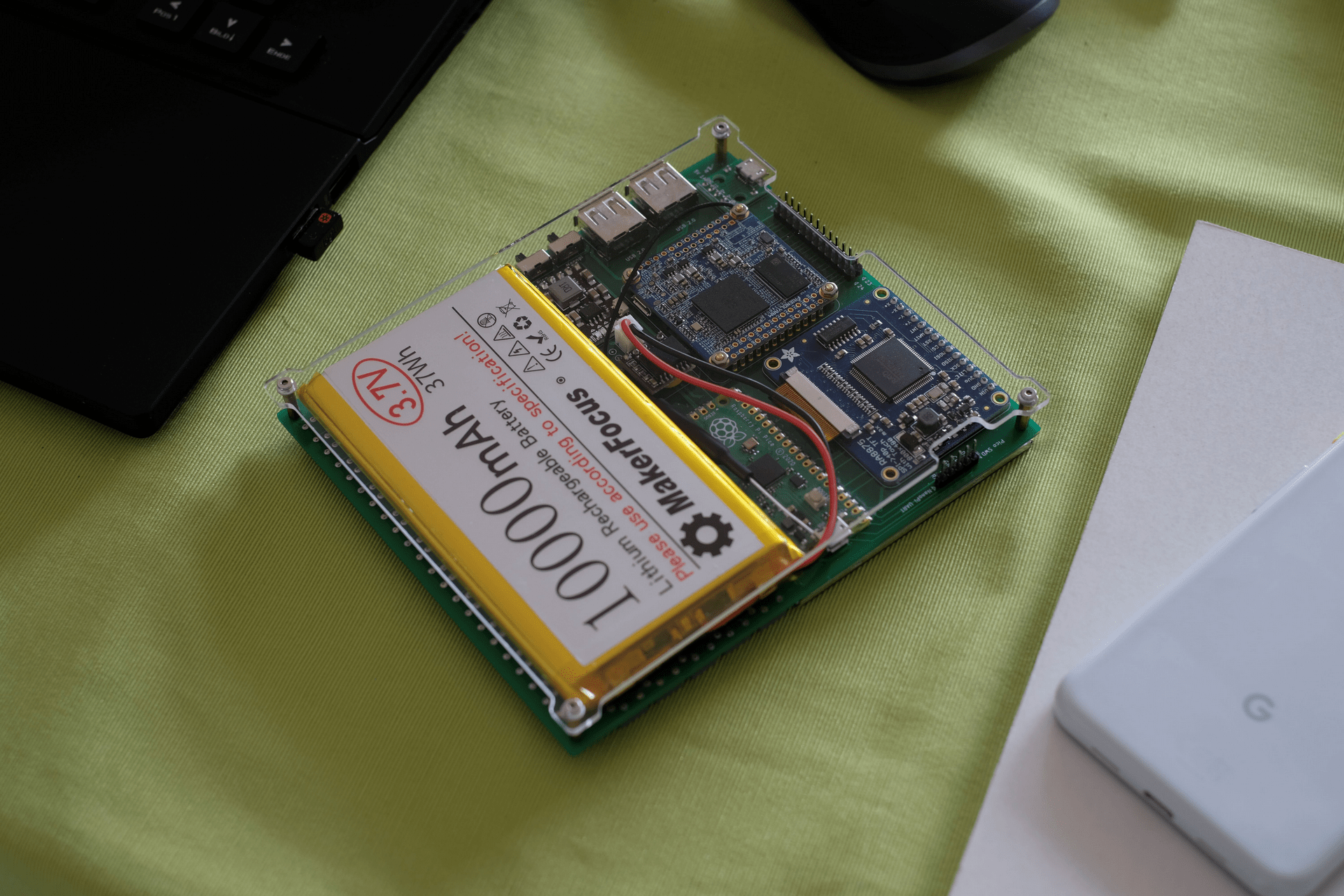
设备由一块10000mAh的LiPo电池供电,可提供高达15小时的使用时间,并且可以通过Micro-USB充电。终端支持ASCII、Latin-1补充字符集、盒型绘图字符、块字符、盲文以及一些几何形状字符,并支持256种颜色显示。
项目硬件组成:
- NanoPi Neo Air(搭载DietPi)
- 树莓派Pico
- Adafruit RA8875板
- 800x480 TFT显示屏
- 71键键盘矩阵
- DS3231实时时钟(RTC)模块
- 10000mAh LiPo电池
- Micro-USB充电接口
- 2个USB 2.0接口
- 可访问的NanoPi Neo Air的16个GPIO口,以及树莓派Pico的SWD和UART口
特点:
- 可作为便携式Linux计算机或UART终端使用
- NanoPi Neo Air和终端可以独立开关
- NanoPi Neo Air是可拆卸的
- WiFi连接功能
- 71键键盘设计,两个Shift键同时按下可以切换Caps Lock
- 使用前无需配置
- 内建RTC
- 支持ASCII和限量的Unicode字符,以及256色显示
- 提供图像显示的功能性解决方法
已知问题:
- Pico上的Micro-USB端口不可用,这是故意为之,为了避免背部供电问题。
- 连接或断开充电器会中断电池板的电源输出。
- NanoPi Neo Air在PCB上的脚印略有不正确,但不至于无法安装。
- USB口彼此太近,不能同时使用。
- 尽管终端可以正常使用,但速度不是特别快。
项目背景故事:
发起者自去年开始作为业余爱好学习电子和Python,曾经梦想将树莓派4变成一个手持电脑,但始终无法让它足够小巧以便舒适持握。偶然中发现了NanoPi Neo Air并冲动购买。由于它没有HDMI或DSI连接,作者又购买了USB串行适配器。通过UART的设置异常简单,最终实现了将NanoPi Neo Air、Pico和屏幕连接起来,制作了这款紧凑型的便携终端机。从项目开始到完成,作者用了5个月的时间,大部分时间花在了编程学习上。
来源:https://hackaday.io/project/192152-handheld-linux-terminal-haliterm
紧凑型Linux终端


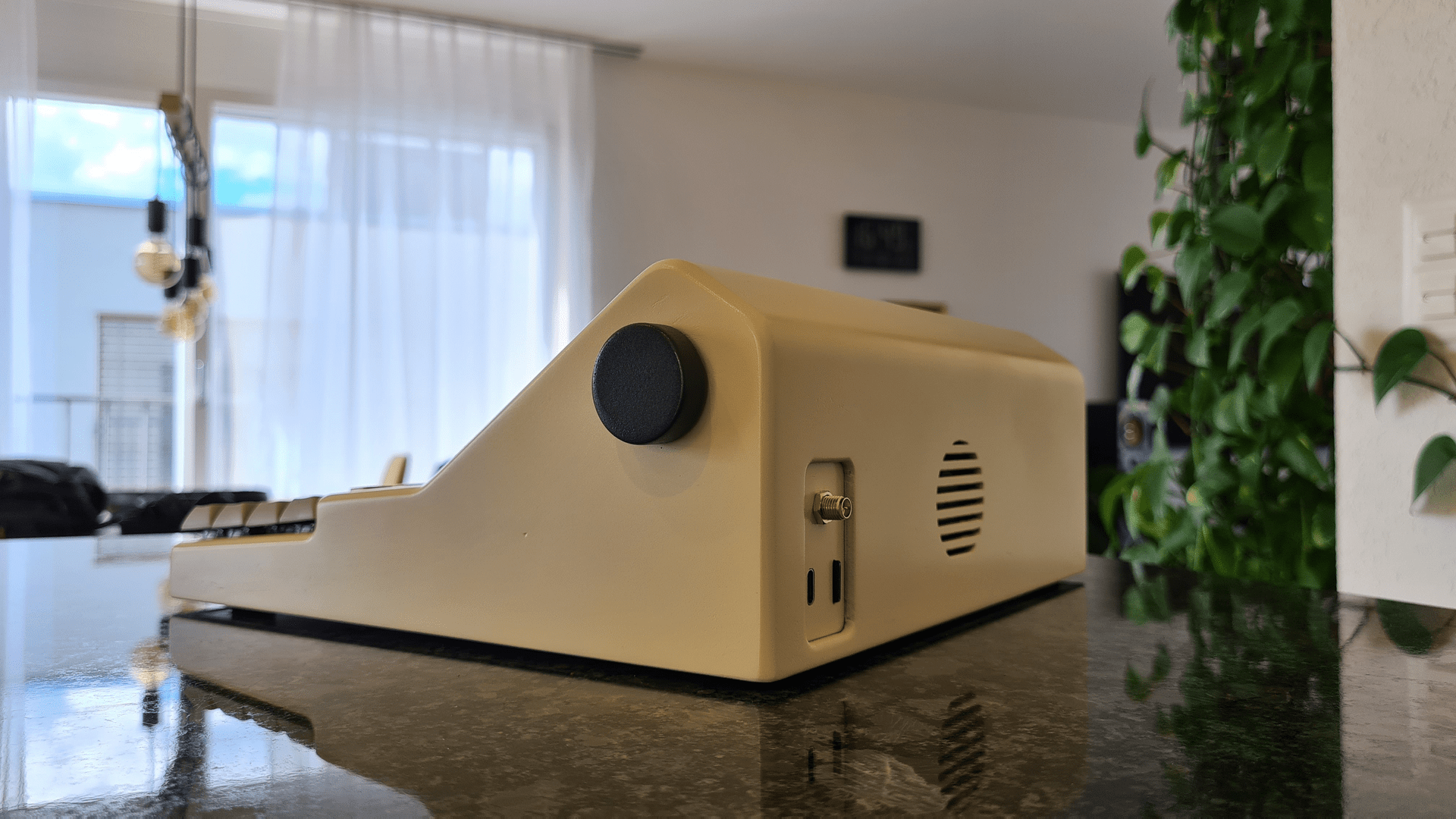

这是一个3D打印的紧凑型Linux终端,它的设计非常适合于那些想要一个可定制、便携且功能全面的Cyberdeck的DIY爱好者。由Nik Reitmann设计和创建,该项目注重于易于组装和个性化,所有部件都可以从内部螺丝到外壳,同时还预留了足够的空间以便于将来升级和更换组件。它采用了复古外观,结实耐用,且没有外部可见的螺丝,尺寸为253x253x104毫米。
项目硬件组成:
- 树莓派4(4GB版)
- Waveshare 7.9英寸HDMI LCD显示屏
- 52Pi树莓派4散热塔(来自AliExpress)
- Arduino PRO micro(或任何其他可以作为USB HID设备的Arduino)
- ICSH044A轨迹球扩展板
特殊功能:
- 侧轮带按钮,用于光标键和回车键(在终端中非常有用)
- 可轻松定制的IO和后板
- 两个WiFi适配器(USB和树莓派内置的)
- 两个蓝牙适配器(USB和树莓派内置的)
- 一个Zigbee适配器(用于调试Zigbee网络)
- 内部SD或microSD存储
- 三个外部USB口
- 外部SD和microSD卡读卡器
- 外部5个GPIO连接器,5V,3.3V,地线(以便可以快速用面包板测试树莓派的改装)
- 可用作完整的桌面电脑
来源:https://hackaday.io/project/192073-techniks-cyberdeck
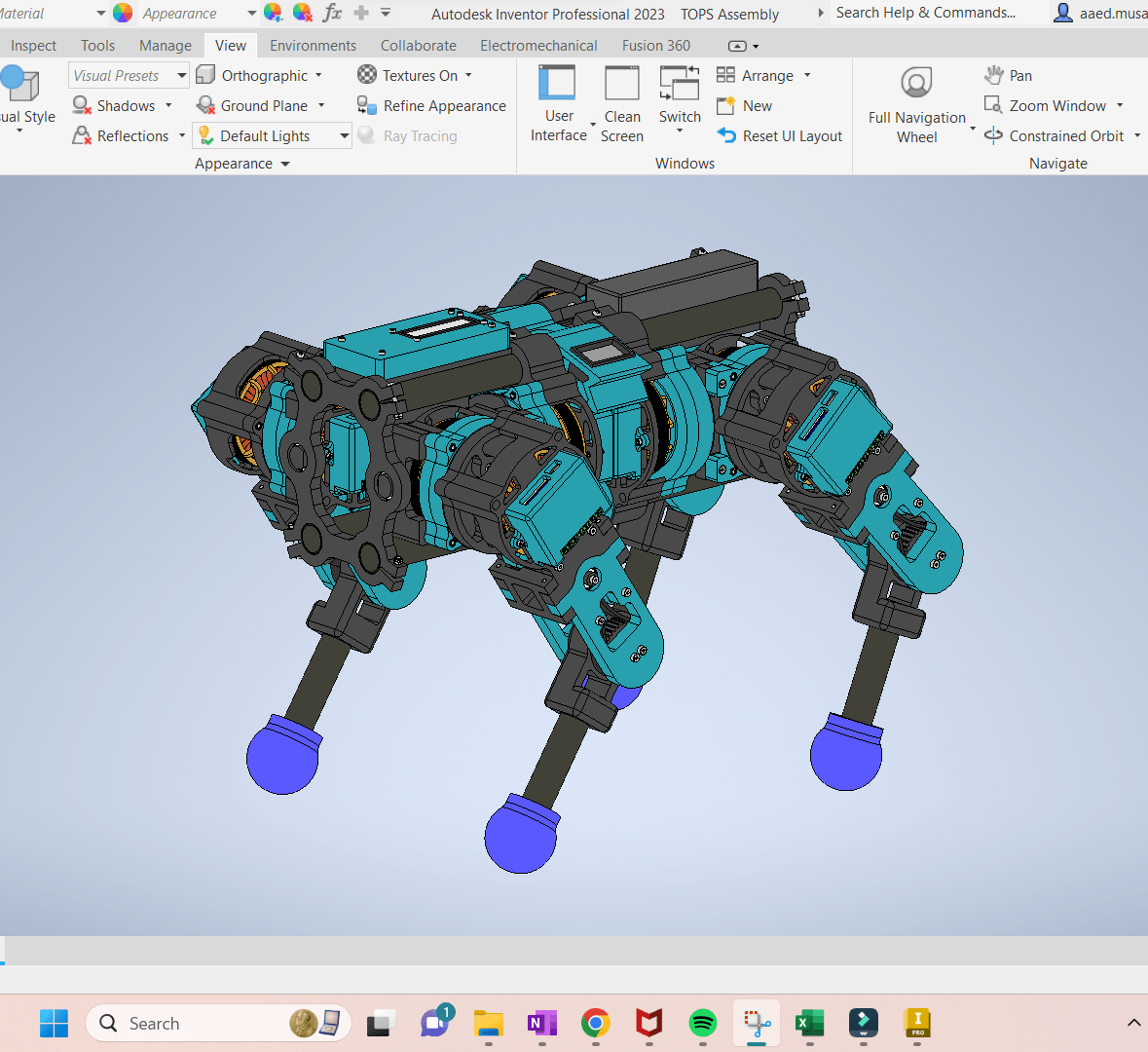
四足机器人TOPS
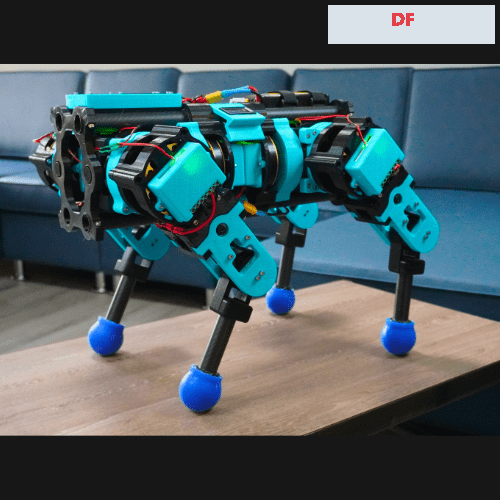
TOPS(Traverser of Planar Surfaces),即“SPOT”(一款著名四足机器人)倒写,是一款自由度为12的四足机器人。该项目的目标是制作一款动态性更强的四足机器人,拥有更加接近真实狗的自然步态。整个机器人的设计和部件均通过3D打印完成,并集成了自定义的QDD(Quasi-Direct Drive)执行器和碳纤维框架,通过Teensy 4.1微控制器来控制机器人的动作。
项目硬件组成:
- 12个自定义QDD执行器
- 3D打印的9:1行星齿轮箱
- 90KV无刷电机
- ODrive S1 FOC(场向量控制)控制器
- 碳纤维框架
- 30A硅胶脚
- 6S 5200mAh锂聚合物电池
- Teensy 4.1微控制器

主要特性:
- 共耗时4个月,总成本$3,300美元,总重29.6磅(约13.43公斤)
- 所有3D打印部分的重量为9.98磅(约4.53公斤)
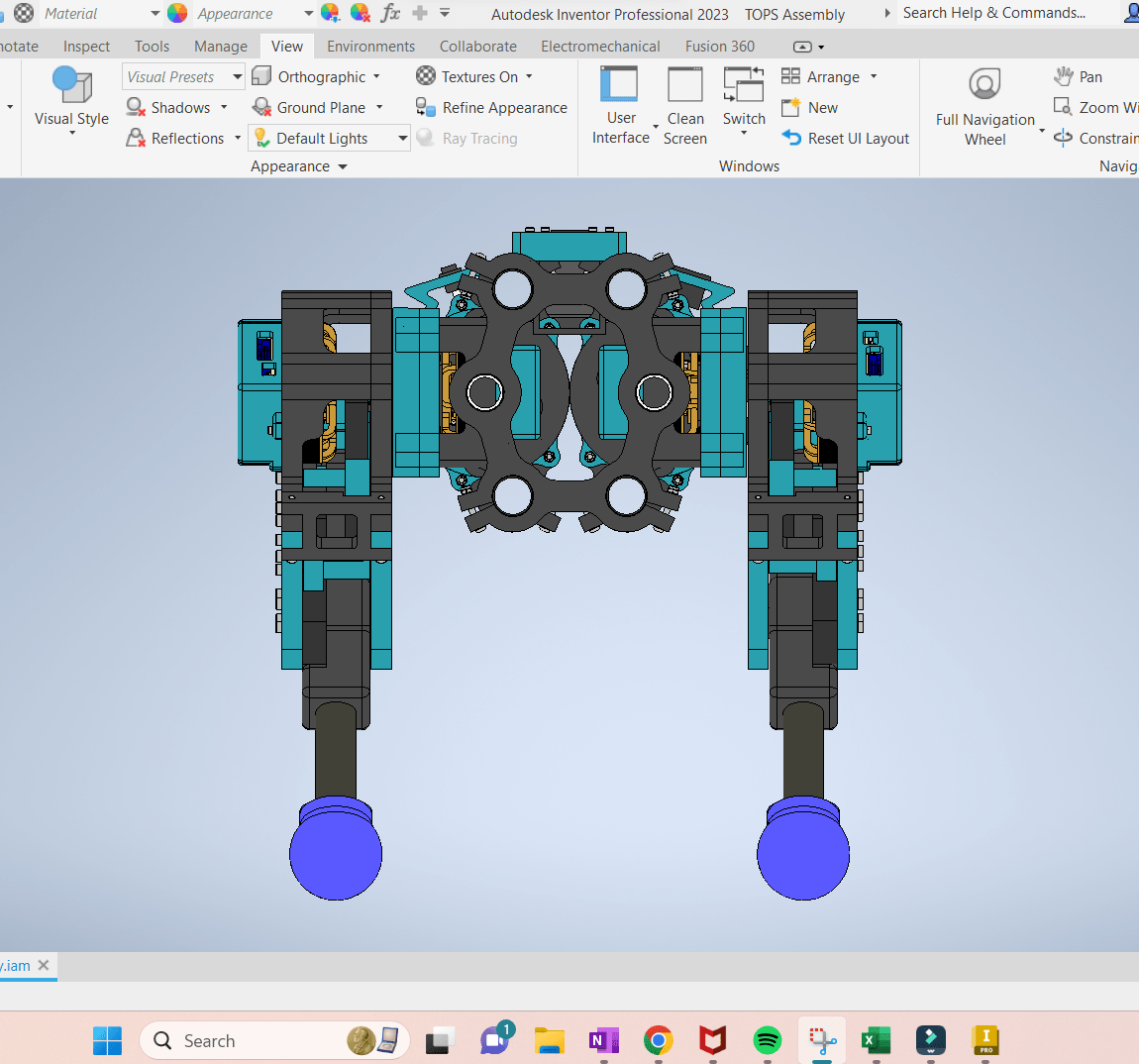
- 腿部和机身设计采用模块化,所有部件足够小,能在200 x 200 x 200毫米的打印床上打印
- 腿部使用硅胶脚,提供更好的抓地力
- 整机组装使用碳纤维管,节省了重量,提高了稳定性
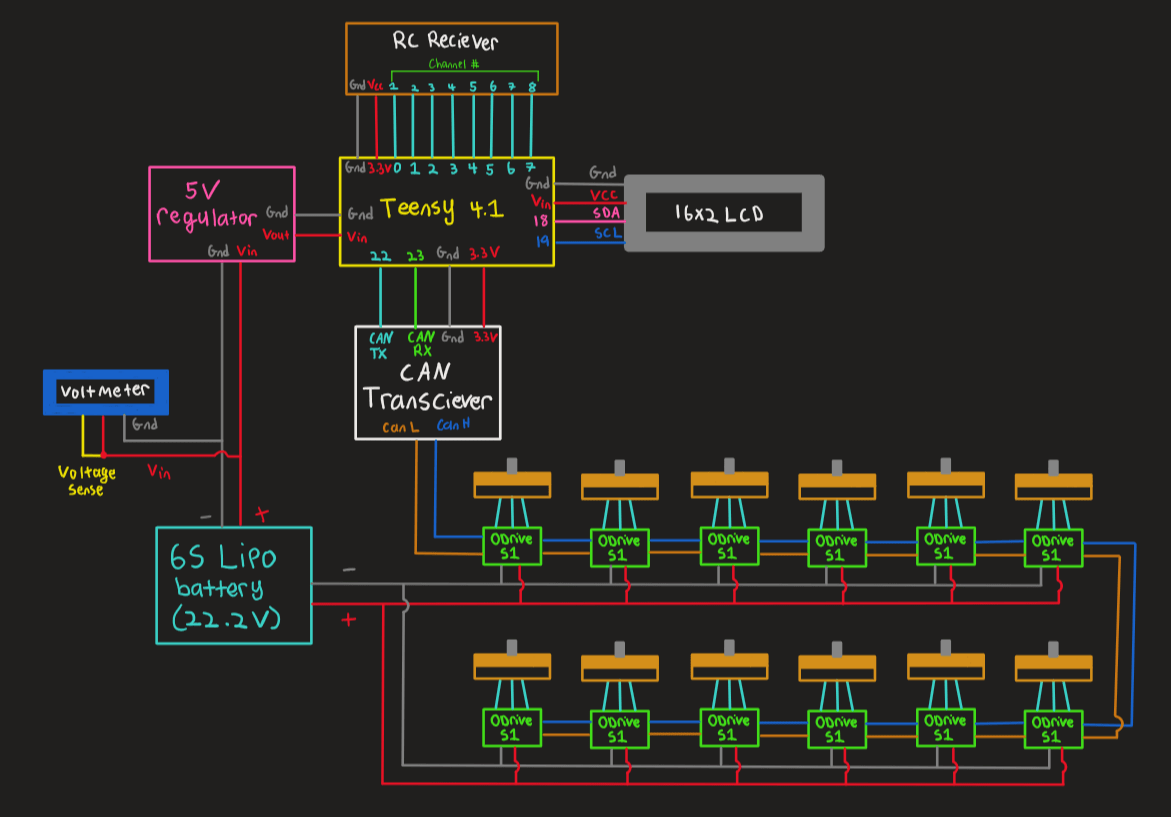
电子电路部分:
- 所有12个执行器由一块6S 5200mAh的锂聚合物电池供电
- 执行器之间通过CAN总线连接,并与Teensy 4.1微控制器通信
- 使用RC遥控器和接收器来控制机器人,以及一个小型的LCD作为不同控制模式的菜单
- Teensy 通过一个5V调节器来降低电池电压进行供电
编程难点:
- 编程时需要考虑多个变量,例如每条腿离地的时间、腿离地的高度、步伐的大小、步态轨迹等
- 基本原则是让两条对角线脚始终与地面接触,这被称为小跑步态,有助于TOPS保持平衡
该项目的设计灵感来源于James Bruton的openDog V3机器人,并且在项目概述网站和GitHub上提供了详细的CAD图纸、代码、材料清单等资源。
设计思路:
- 优化了单腿设计,减轻了重量,并改进了构造以方便整机组装
- 将测试腿的执行器设计作为整个腿的主体结构
- 改进了电机控制,从UART切换到CAN总线,减少了布线并简化了控制方式
- 调整了腿部的步态设计,从原本的正弦步态到更为平滑的步态轨迹
- 实现了跳跃测试和重量测试,以确定腿部和整个机器人的承重能力
该项目的概念证明了四足机器人在结构、电机控制和动态步态上的创新设计。
来源:https://hackaday.io/project/192122-tops
智能仪表板 - 一目了然了解关键信息
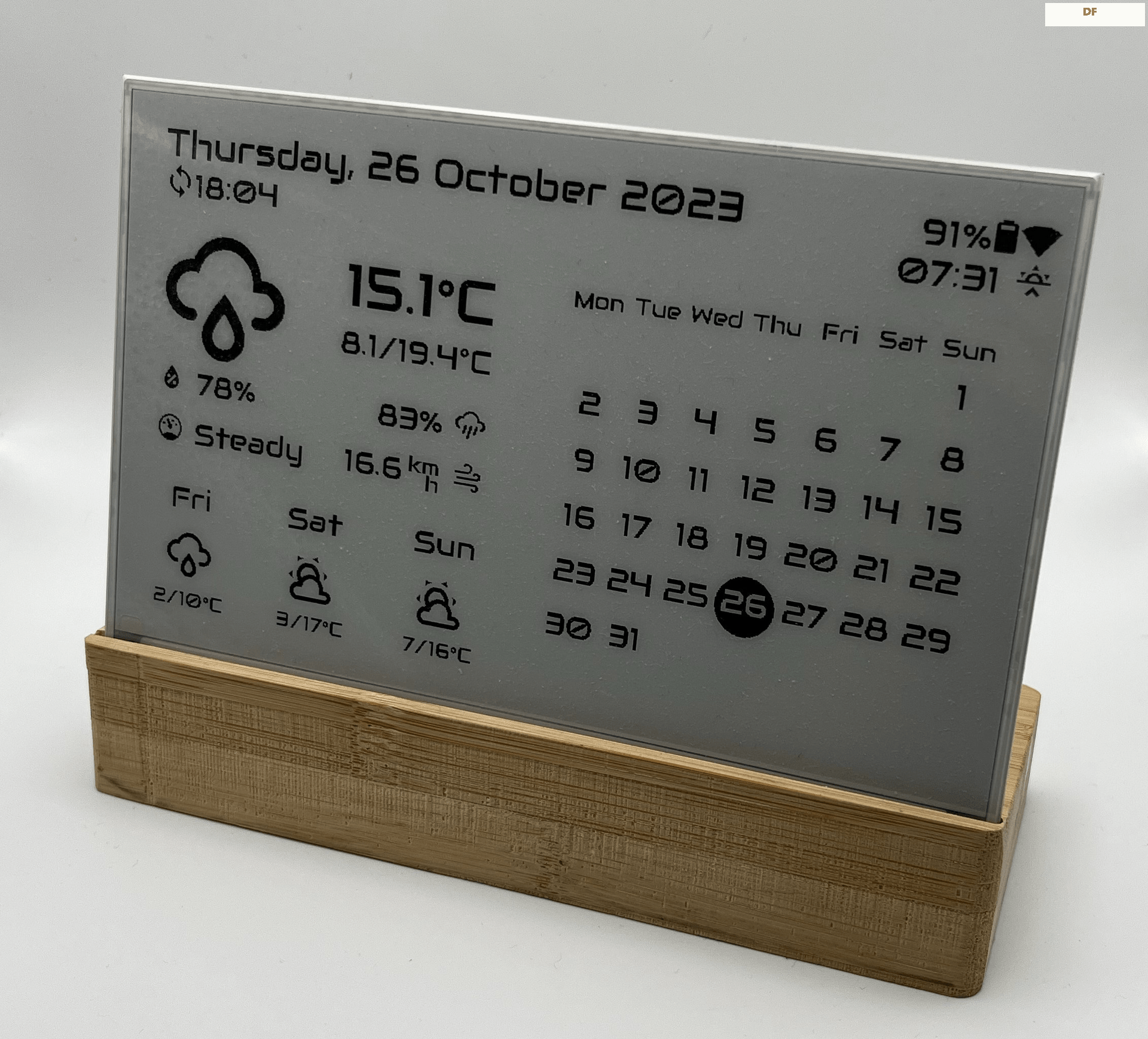
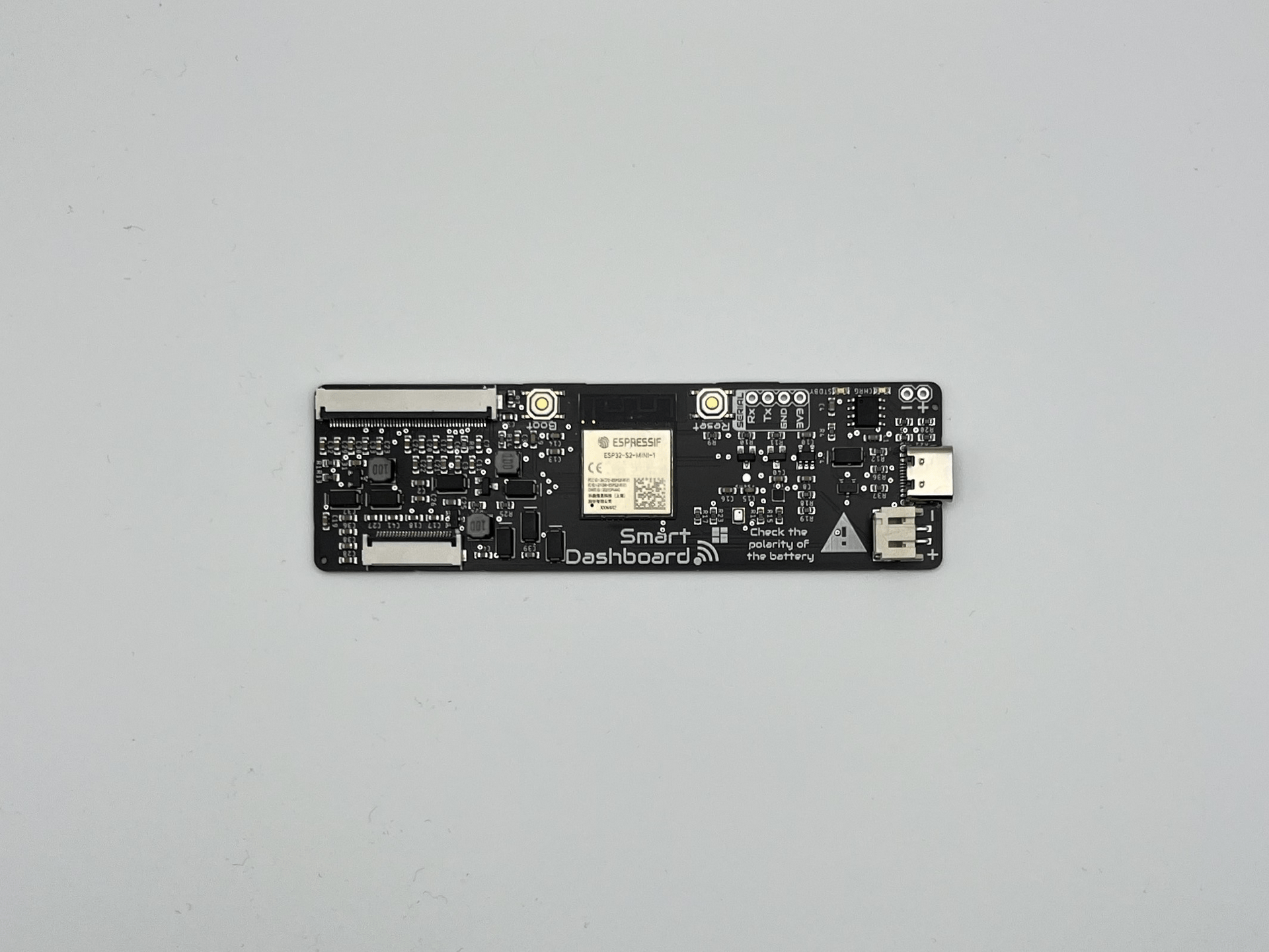
智能仪表板是一款集成了ESP32-S2-MINI微控制器的电子板,配备了支持7.5英寸电子墨水显示屏的所有必要组件。作者通过自己的手工技能,把它变成了一个非常时尚的桌面仪表板,用来显示来自Home Assistant设置的各种参数,如天气预报和每月日历概览等等。
项目硬件组成:
- ESP32-S2-MINI主控制器
- 适配不同电子墨水显示屏的电路,支持两种显示屏选项:
- Waveshare 7.5" 黑白电子墨水显示屏(已成功测试)
- Waveshare 7.3" 7色电子墨水显示屏(目前未测试)
- 集成了BMP280环境条件测量传感器
- LC70923电池监测传感器
- 5000mAh电池,通过使ESP32进入深度睡眠模式(并关闭传感器)1小时,唤醒时间少于10秒来实现长期待机
- 支持外接太阳能板,虽然这个功能在室内可能用处不大
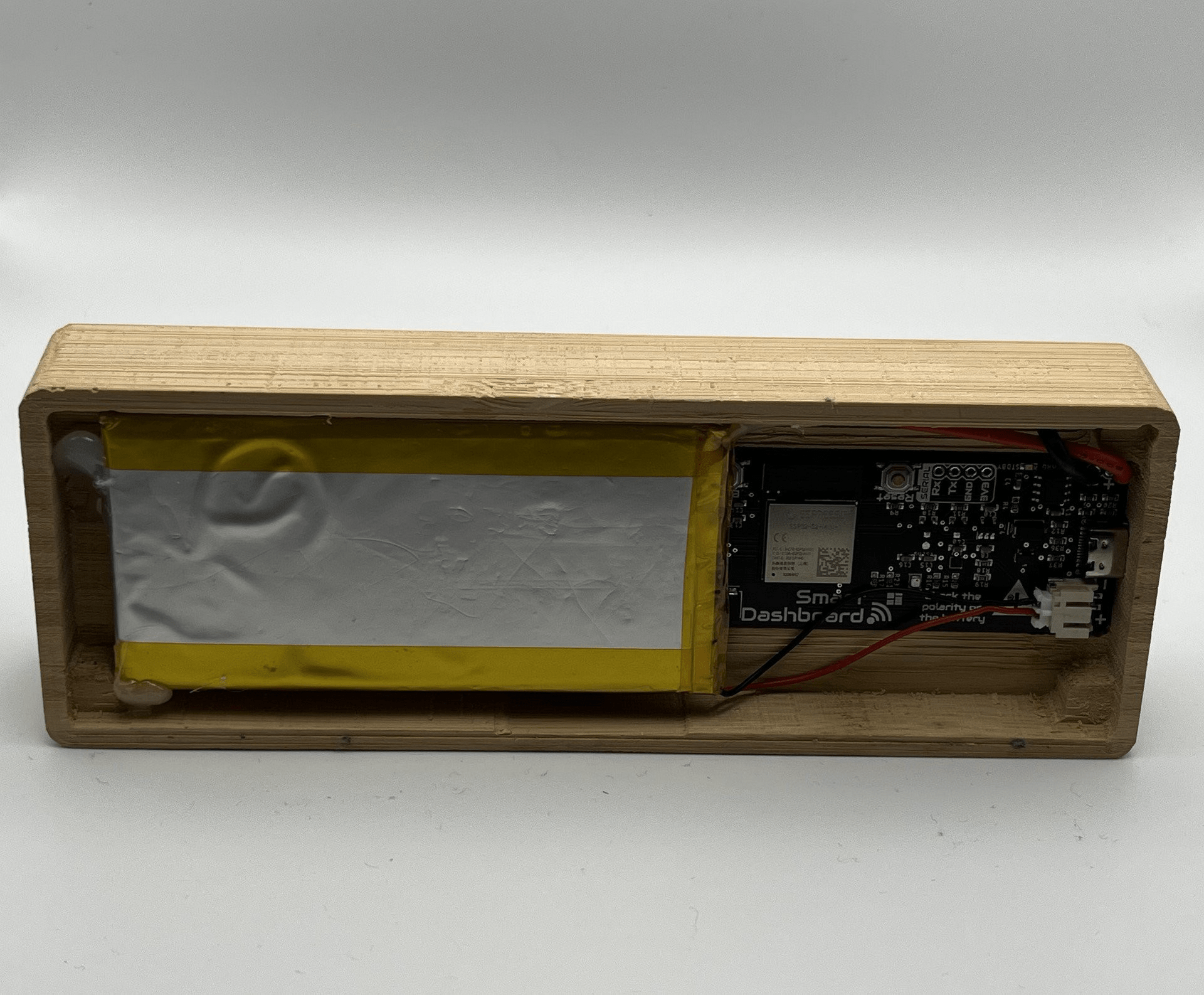

这个项目不仅在技术上创新,而且在设计上也展现了极简与现代的美学,是那些喜欢DIY并且对家居智能化有需求的人的理想选择。
来源:https://hackaday.io/project/193360-smart-dashboard
赛博朋克风UV-5R无线电

在《赛博朋克2077》这款游戏的开场场景中,角色使用的无线电吸引了作者的注意,因此作者决定将Baofeng UV-5R无线电机改造成一款具有赛博朋克风格的“Arduino软件定义无线电(SDR)”。项目的核心是将UV5R嵌入一个类似的外壳,并使用Arduino重新设计用户界面。

项目硬件组成:
- 1个2.42英寸黄色OLED显示屏(RGB SSD1309 128x64)
- 1个迷你型Arduino Mega 2560 Pro Micro USB控制板
- 5个SN74HC4066四路双向模拟开关IC
这个项目展示了如何将传统的无线电设备与现代的DIY技术相结合,非常有意思。
来源:https://hackaday.io/project/191862-cyberpunk-uv-5r




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






