|
27293| 9
|
[项目] 基于树莓派的顶级机器人项目(DIY机器人和智能设备) |

|
有一些树莓派4B项目展示了机器人平台的多功能性和创造力。这些项目包括构建一个小巧的六足机器人,建造一个带有自动深度控制的利用乐高搭建的潜水艇,使用乐高零件创建一个自平衡反作用轮倒立摆,训练一个机器学习模型监控音频控制台旋钮,并通过树莓派无线控制一个移动坦克等。 这些项目提供了对树莓派4B能力的独特见解,并展示了将各种组件整合在一起用于创新应用的能力。
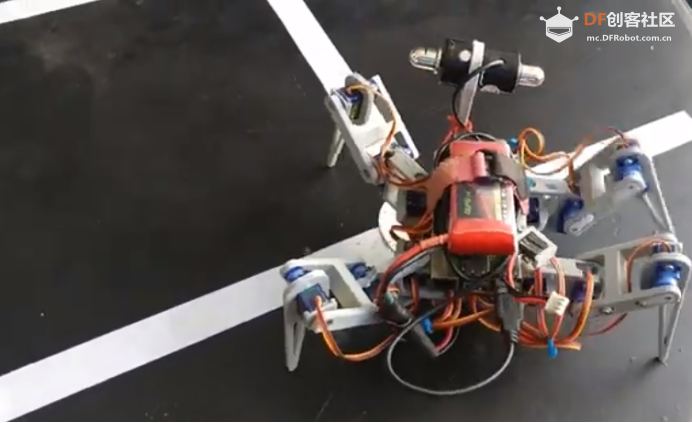
 介绍:ZeroBug是一款由树莓派Zero和STM32F103微控制器驱动的紧凑且价格实惠的六足机器人。它具有自定义的运动引擎、3D打印组件和通过鼠标、键盘、多点触控或蓝牙游戏手柄进行控制的Web界面。该项目的硬件、软件和设计文件均可在GitHub上获取。
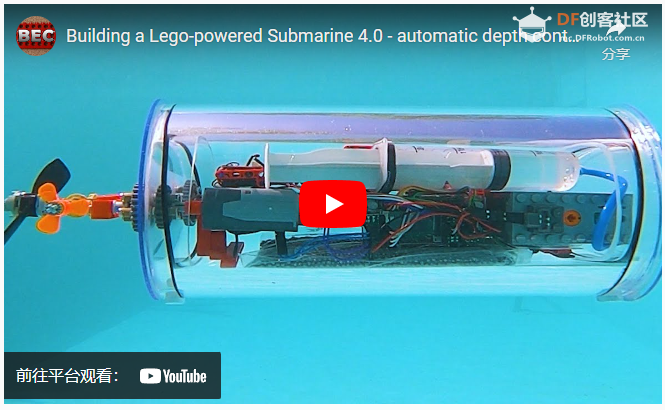 介绍:这款无线电遥控的潜艇能够保持稳定的深度或与水底保持一定的距离。它配备了压力传感器和激光测距传感器。使用树莓派和PID控制进行自动化。在游泳池和小河中进行了测试(视频末尾可见)。
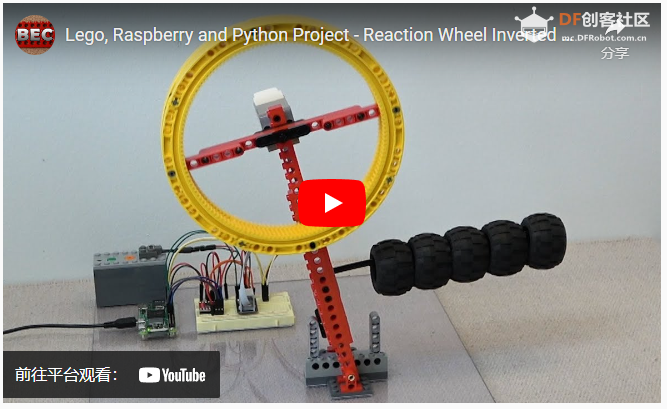 介绍:单轴自平衡反作用轮倒立摆。这个装置本质上是不稳定的,是控制理论中常见的挑战。机械结构仅使用乐高零件构建,电机也是乐高的。角度传感器和电子元件则不是乐高的。
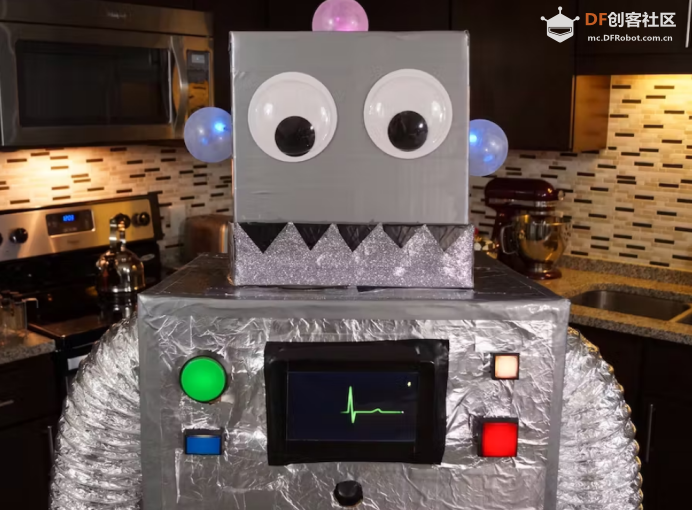 介绍:在这个万圣节建造项目中,创作者使用了各种组件,如树莓派、Arduino、舵机、RGB LED 灯和音频模块制作了一个机器人服装。他们改变了自己的声音,控制机器人下颌的运动,给头部添加了RGB LED,还在树莓派上编写了一个Python脚本,根据Instagram的点赞数量显示视频。
 介绍:这个项目涉及训练一个机器学习模型来监测音频控制台上模拟旋钮的位置。通过使用带有摄像头模块和DFRobot Led Switch按钮的树莓派,系统可以检测不正确的旋钮位置,并防止录音会话受到损害。该模型使用正确和不正确旋钮位置的图像进行训练,树莓派被设置为运行必要的监测和检测软件。
 介绍:这个项目涉及构建一个由树莓派驱动的四足机器人,并利用TensorFlow和Keras实现深度学习,以识别用于导航的特殊标记。机器人设计被修改以适应树莓派,并且电子设备包括舵机电机、舵机控制器、降压转换器和USB摄像头。
 介绍:在这个演示中,通过Unity游戏中虚拟坦克的移动来控制真实移动坦克的运动。这是通过在游戏中的虚拟坦克和真实移动坦克之间建立网络连接实现的。
 介绍:本项目旨在通过开发一个自主机器人来解决垃圾问题,该机器人利用物体检测技术追踪和监测垃圾。该机器人配备了一个经过训练的神经网络模型,用于检测诸如瓶子、罐子和包装等垃圾物品,同时采用了树莓派、RPLIDAR A1M8 360度激光扫描仪和USB摄像头。此外,还实现了一个坠落检测系统,以保护机器人免受碰撞的影响。
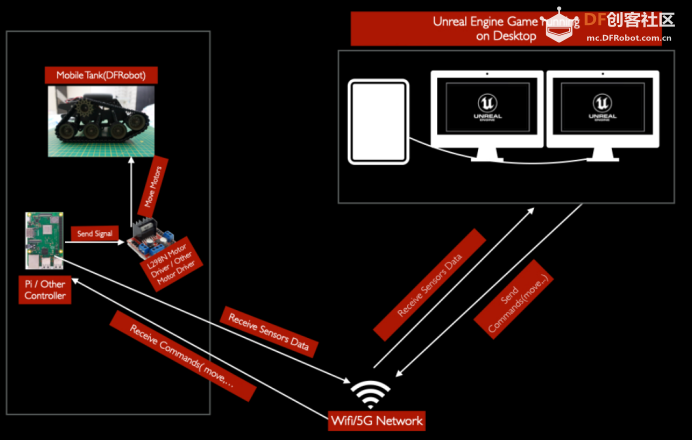 介绍:在这个演示中,真实移动坦克的运动由游戏中的虚拟坦克的运动控制。通过在游戏中的虚拟坦克与真实移动坦克之间建立网络连接来实现这一效果。在这个项目的版本中,我们使用虚幻引擎来构建我们的游戏。为了与移动坦克进行通信,我们使用TCP消息传递。虚幻引擎游戏通过无线网络将指令(前进/后退)发送给树莓派。然后,树莓派将信号发送给L298N电机驱动器来控制电机的运动。
 简介:我们从一个非常基础的机器人开始,它实际上是一个坦克,通过键盘进行无线控制。这是一个嵌入式Python程序,它接收键盘输入并向连接在坦克上的电机发送信号。该程序在一个搭载Raspbian操作系统的小型树莓派上运行。其他的连接方式在视频中通过图表进行了详细解释。 我们通过树莓派和L298n电机驱动器无线控制一个自制的移动坦克平台。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






