|
2009| 0
|
[K10教程] 行空板K10 + PlatformIO + Trae IDE 开发指南 |

|
从零开始,使用 Trae IDE 和 PlatformIO 开发行空板 K10 项目 前言 行空板 K10 是一款面向创客教育的国产开发板,集成了屏幕、传感器、LED 等丰富的硬件资源。本文将介绍如何使用 Trae IDE(字节跳动推出的 AI 编程助手)配合 PlatformIO 进行,行空板K10 开发,体验 AI 辅助编程的便捷。 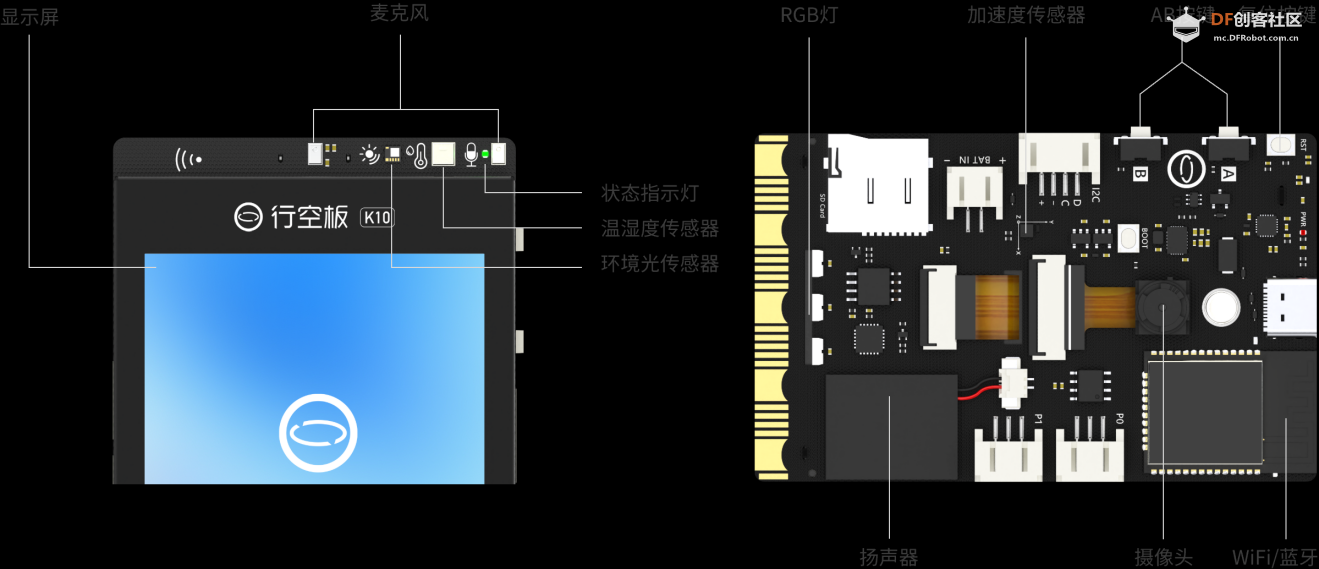 1.1 安装 Python PlatformIO 依赖 Python 环境。 下载地址:https://www.python.org/downloads/ 安装注意事项: - 建议安装 Python 3.8 或更高版本 - 安装时勾选 "Add Python to PATH"选项  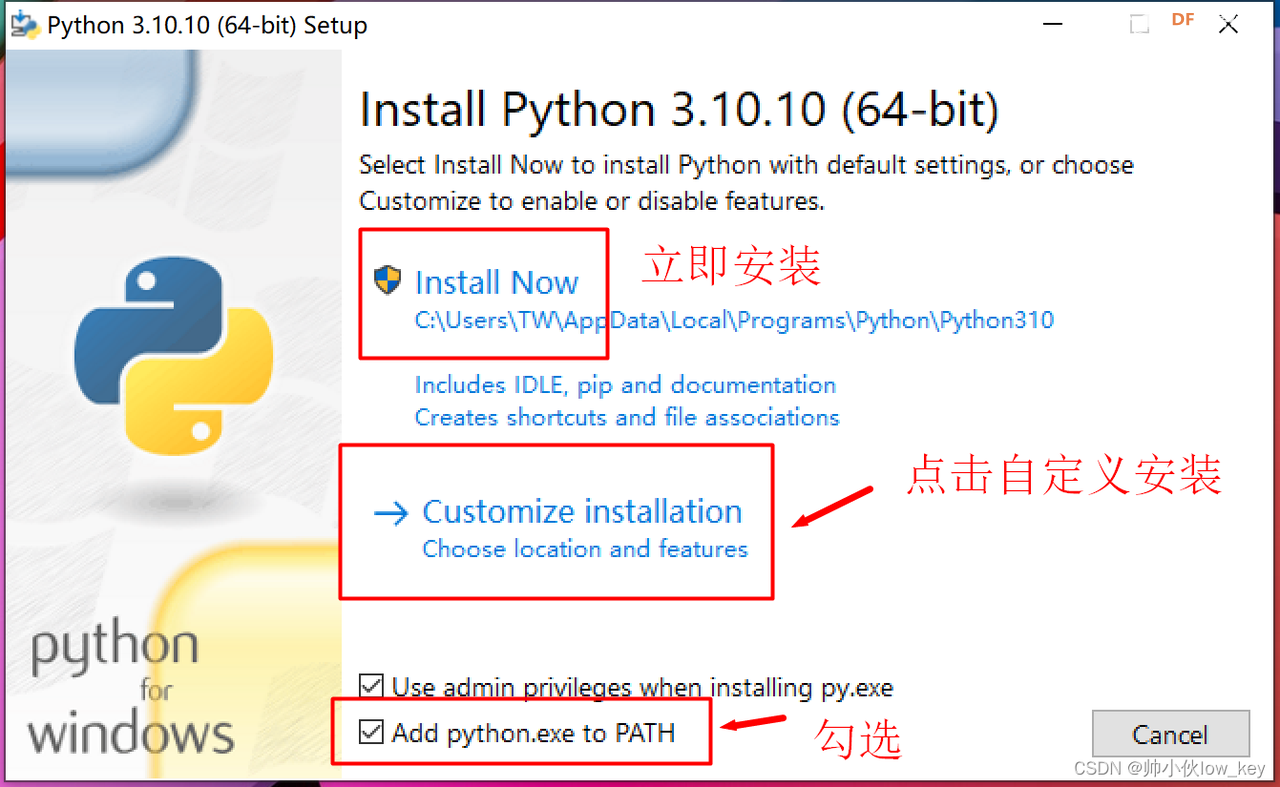 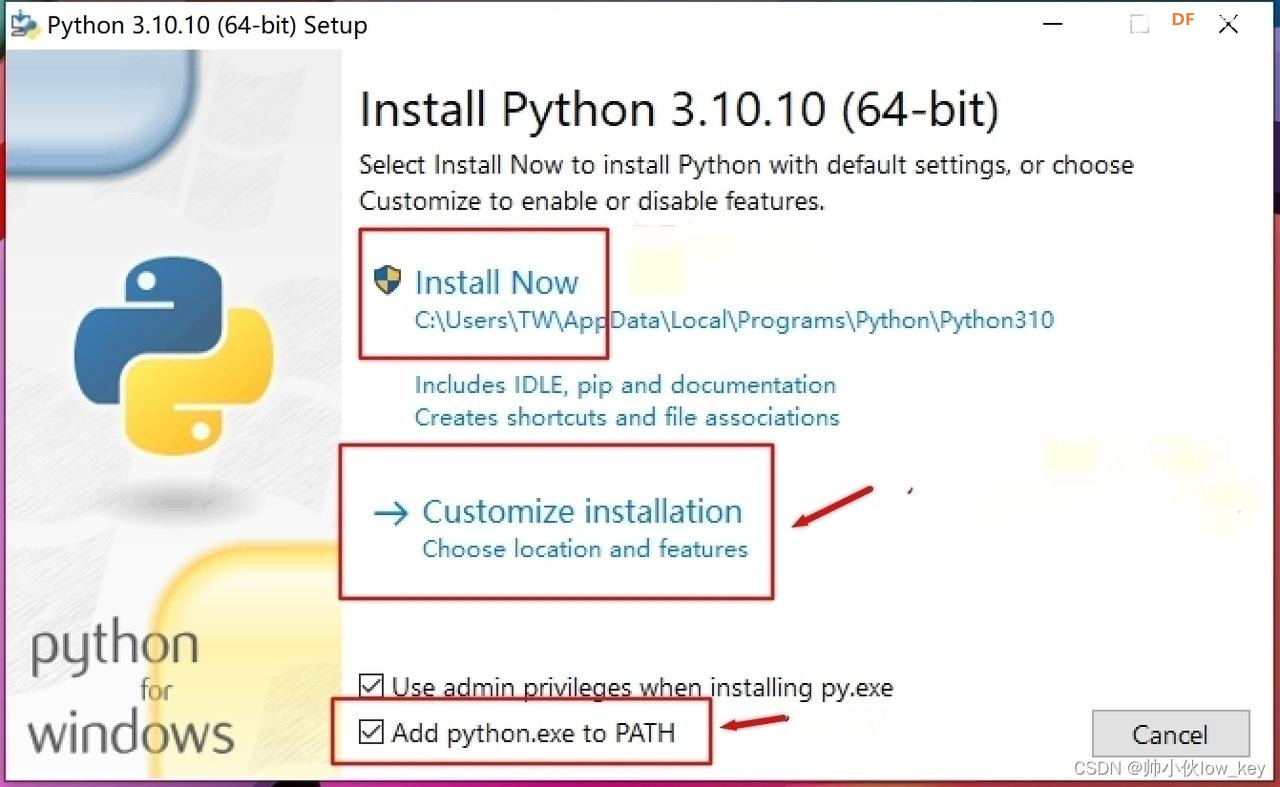 1.2 安装 Git  用于克隆项目和库管理。 下载地址:https://git-scm.com/downloads Git就只管安装就好了 1.3 下载 Trae IDE Trae 是字节跳动推出的 AI 编程 IDE,内置 PlatformIO 支持。 下载地址:https://www.trae.ai/  安装步骤: 1. 访问官网下载对应系统版本 2. 运行安装程序,按提示完成安装 3. 首次启动需要登录/注册账号 登录后,这些国产模型免费使用,只是高峰时间可能会需要排队,但排队程度挺快的。 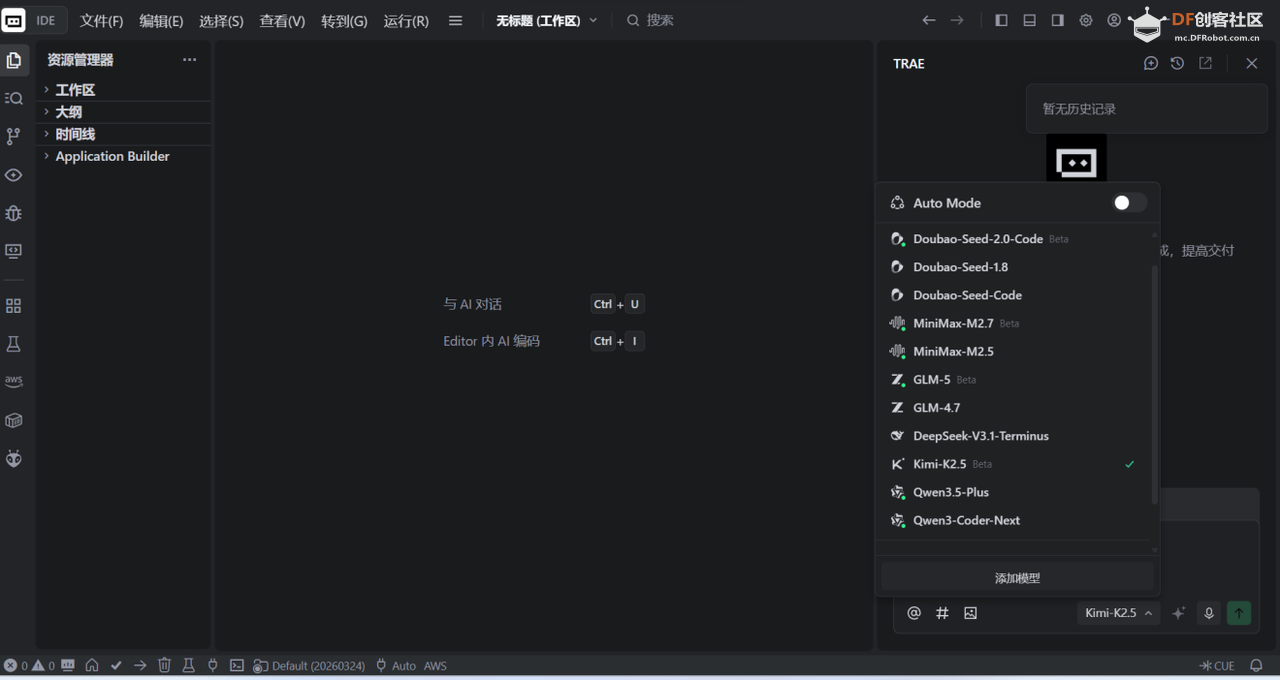 2. 插件安装与网络配置 2.1 安装 PlatformIO 插件 Trae IDE 基于 VS Code,扩展安装方式相同: 1. 打开 Trae IDE 2. 点击左侧 扩展图标(或按 `Ctrl+Shift+X`) 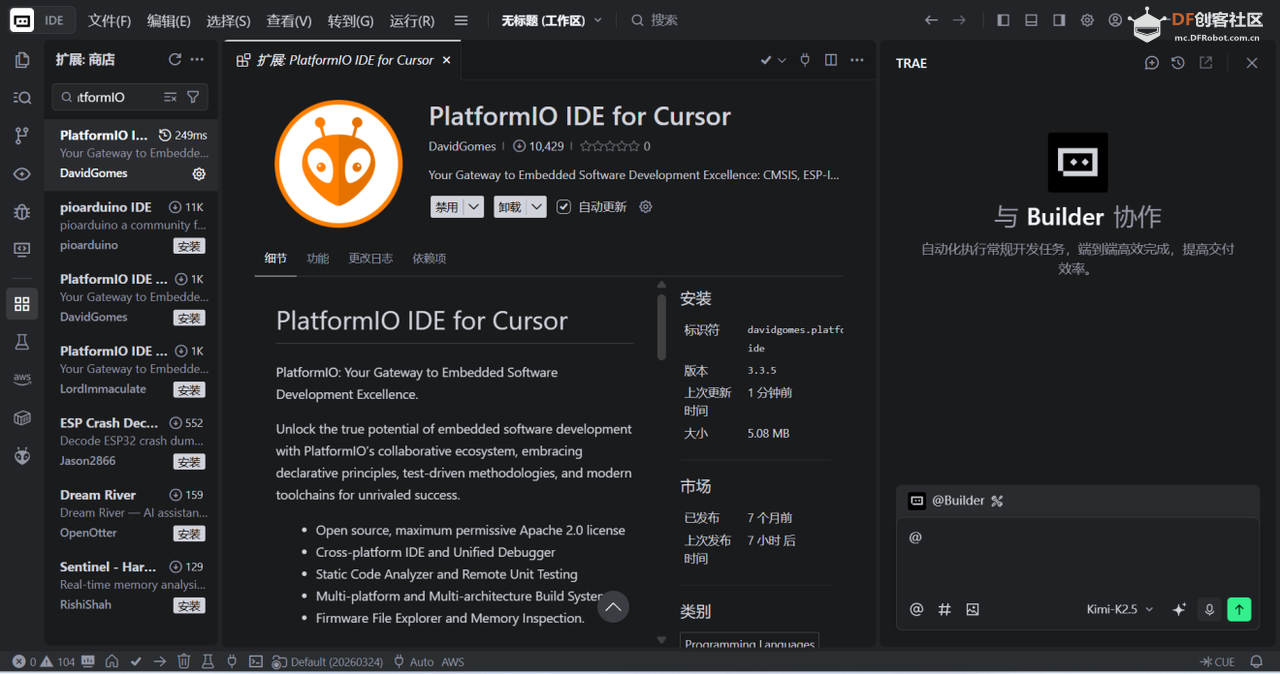 3. 搜索 "PlatformIO IDE" 4. 点击 安装 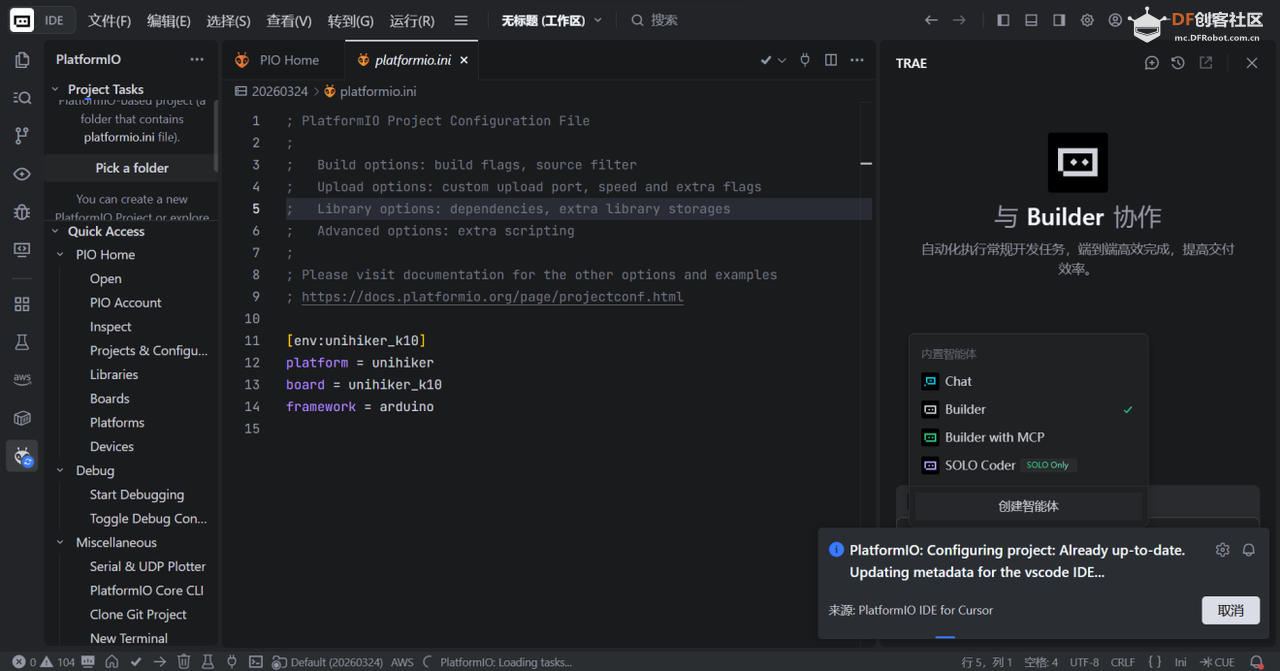 很多人会卡在这一步,一直等着,没有反应。 2.2 网络问题解决方案 由于 PlatformIO 的平台和库托管在 GitHub 等海外服务器,国内用户可能遇到下载慢或失败的问题。 可以使用国内镜像(无需翻墙) 设置 PlatformIO 镜像:   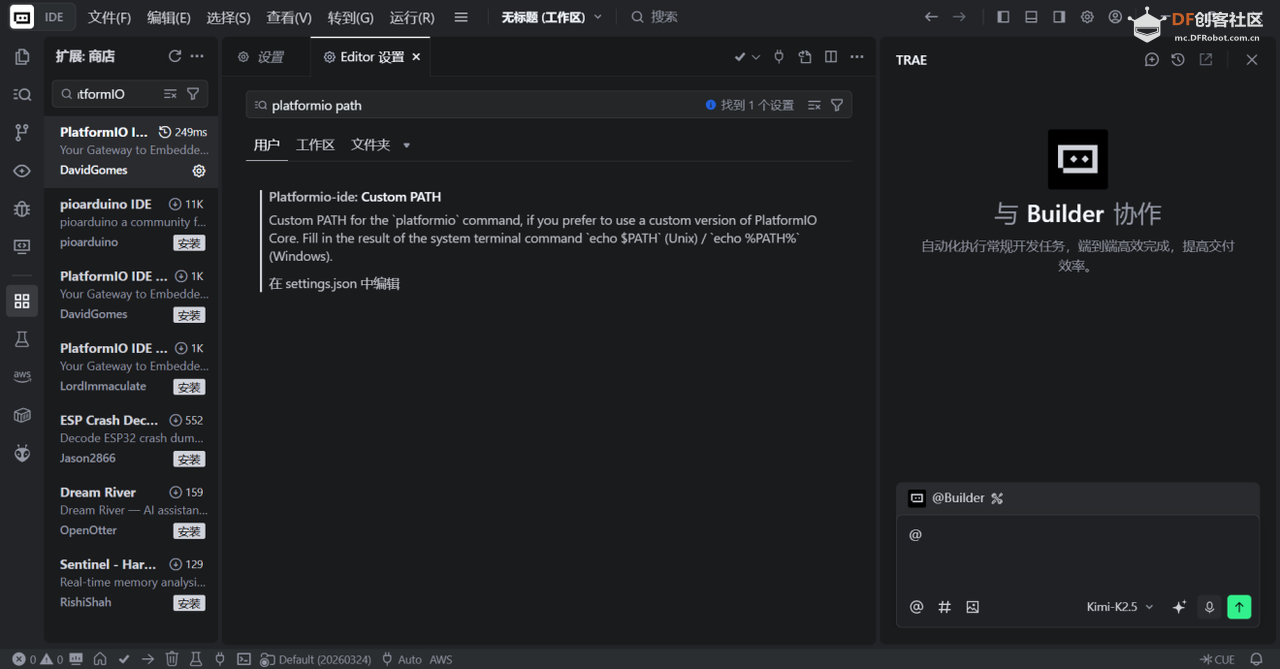 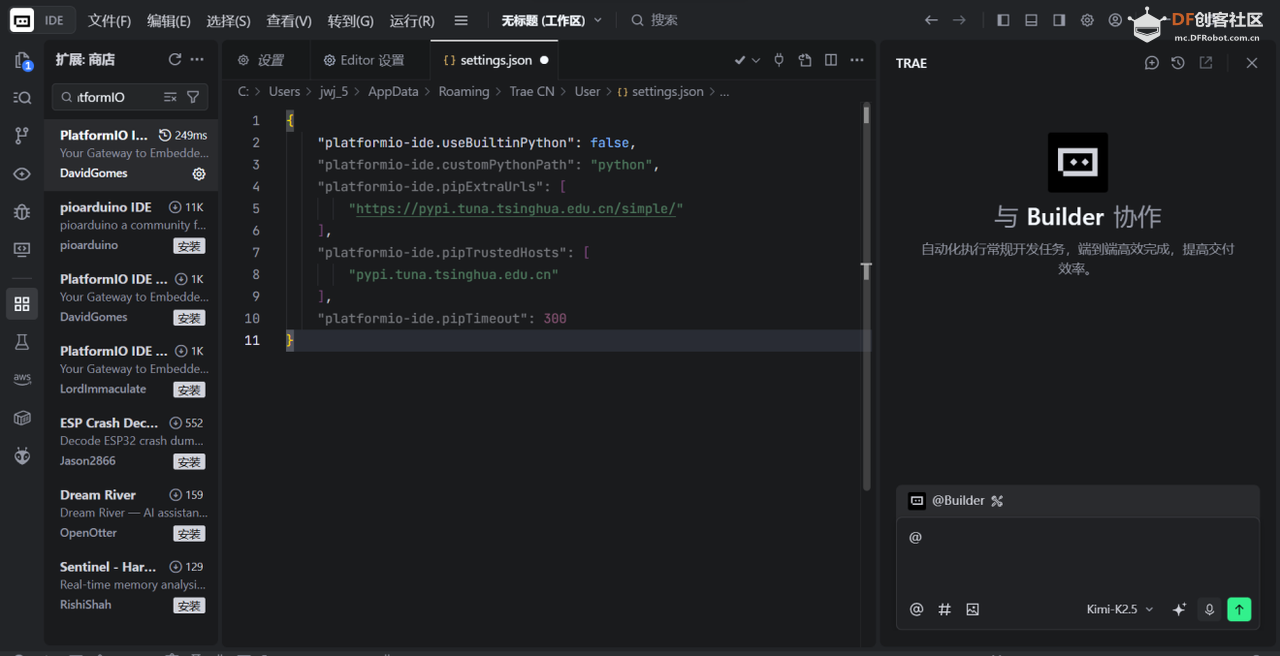 退出 时记得点保存 { "platformio-ide.useBuiltinPython": false, "platformio-ide.customPythonPath": "python", "platformio-ide.pipExtraUrls": [ "https://pypi.tuna.tsinghua.edu.cn/simple/" ], "platformio-ide.pipTrustedHosts": [ "pypi.tuna.tsinghua.edu.cn" ], "platformio-ide.pipTimeout": 300 }``` 3. 创建第一个工程 3.1 创建新项目 1. 打开 Trae IDE 2. 点击左侧PlatformIO 图像(外星人头像) 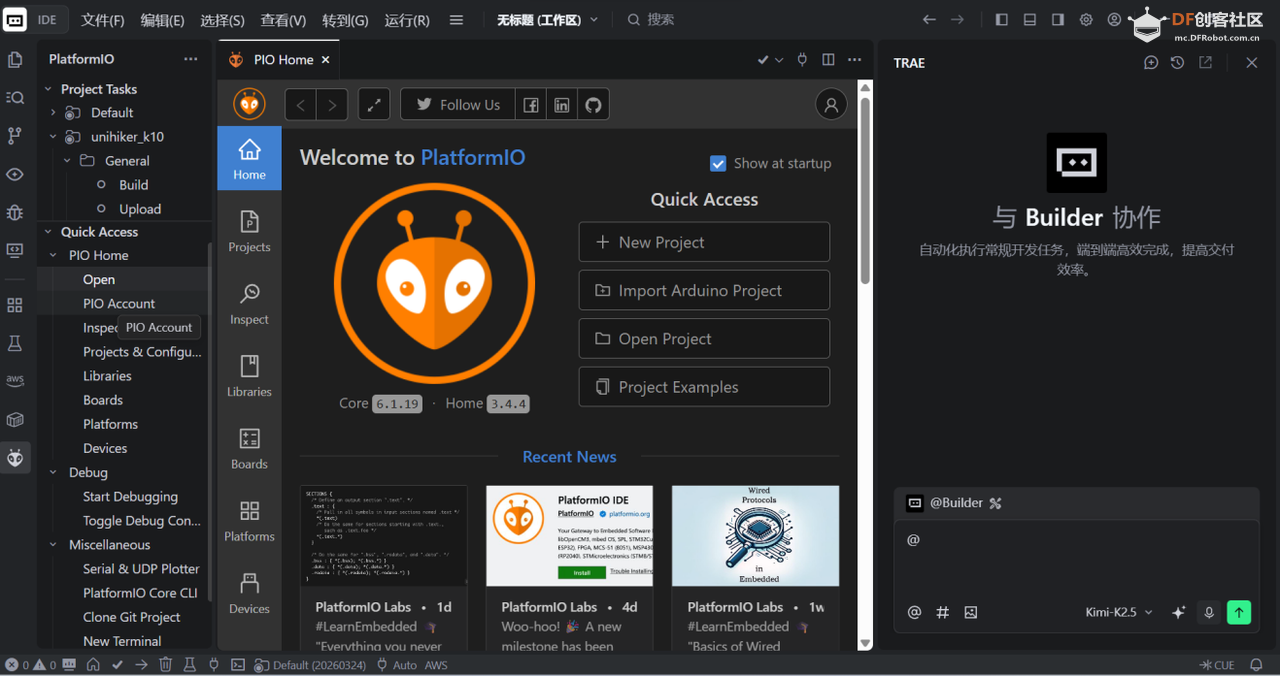 3. 选择 **"Create New Project"** 4. 填写项目信息: - Name:项目名称(如:`k10-demo`) - Board:搜索DFRobot中“选择Firebeetle 2 ESP32-S3` 或 `UNIHIKER_K10`第一次可能只有Firebeetle 2 ESP32-S3 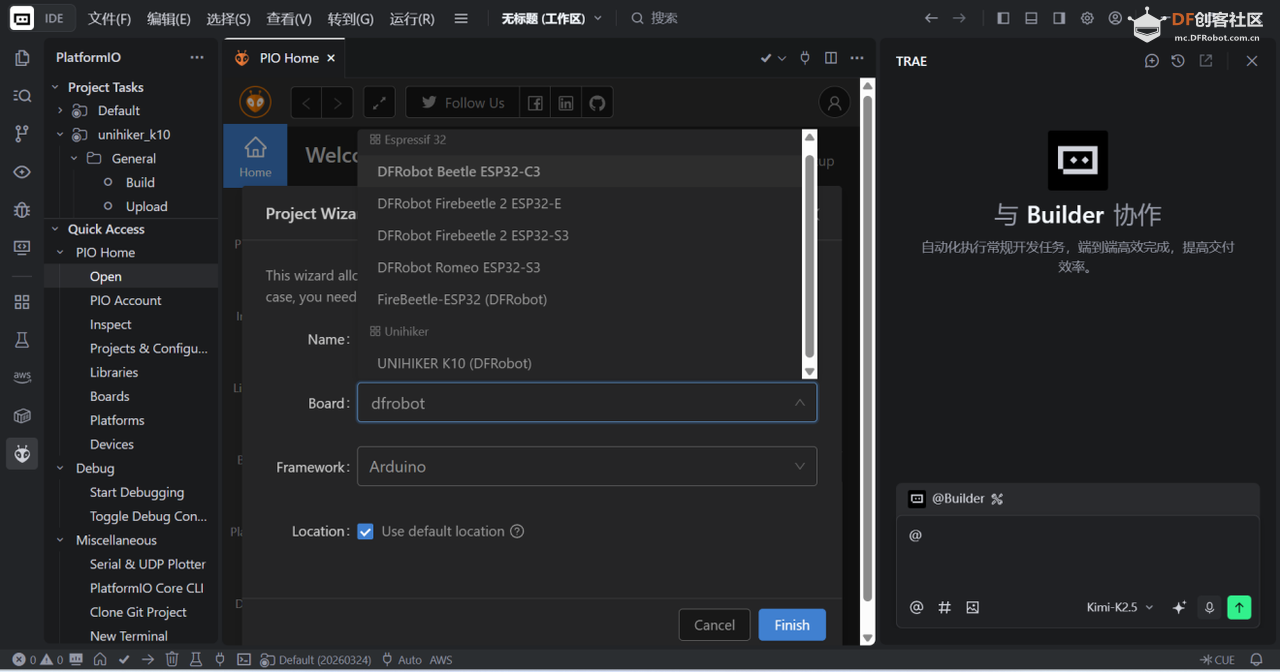 - Framework:** 选择 `Arduino` - Location:** 选择保存路径 5. 点击 "Finish"等待项目创建 到了这一步才是真正安装好PlatformIO,如果卡在这一步,请搜索“清理python环境、环境变量设置”相关关键词。或者闲鱼上搜索“远程安装platformIO”。跨过了这地狱级的环境安装后,所有的项目制作都会变得丝滑了。 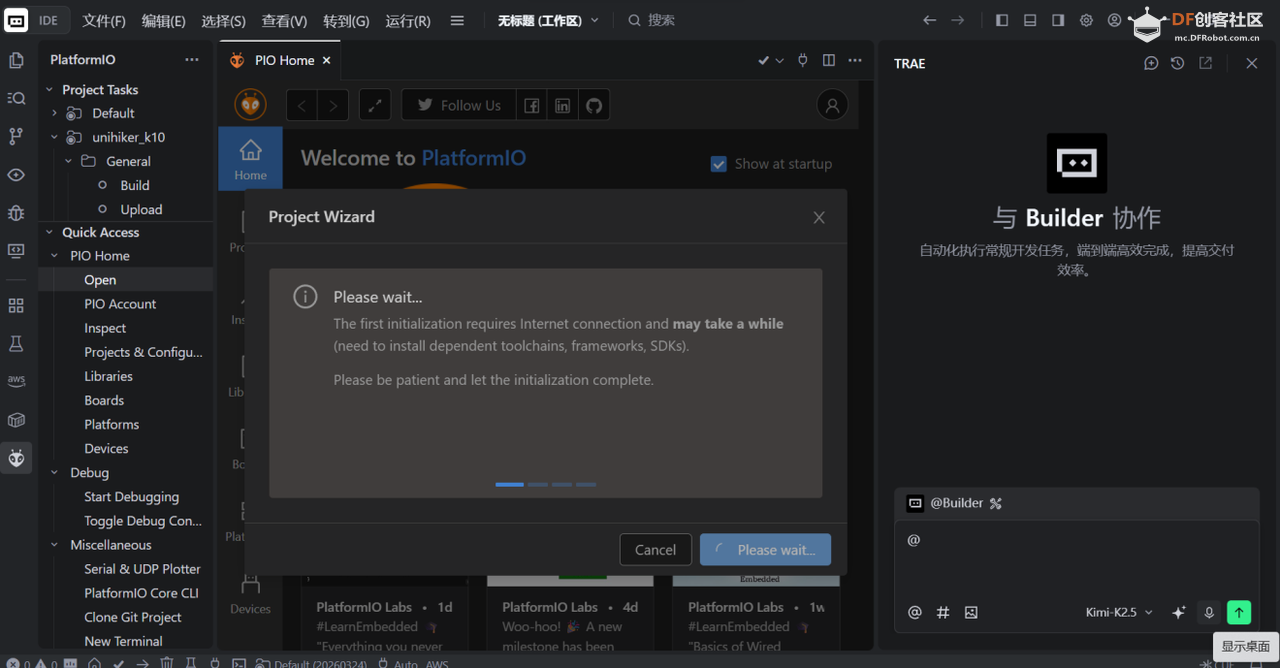 3.2 项目目录结构 k10-demo/ ├── .pio/ # 构建缓存(自动生成) ├── .vscode/ # IDE 配置 ├── include/ # 头文件目录 ├── lib/ # 本地库目录 ├── src/ # 源代码目录 │ └── main.cpp # 主程序 ├── test/ # 测试代码 ├── .gitignore # Git 忽略规则 └── platformio.ini # 项目配置文件 ``` --- 4. 配置文件详解 Platform IO - UNIHIKER Documentation 链接中找Vscode配置文档,和Trae一模一样 4.1 platformio.ini 核心配置 这是 PlatformIO 最重要的配置文件: ```ini ; PlatformIO 项目配置文件 [env:unihiker] platform = https://github.com/DFRobot/platform-unihiker.git board = unihiker_k10 framework = arduino build_flags = -DARDUINO_USB_CDC_ON_BOOT=1 -DARDUINO_USB_MODE=1 -DModel=None 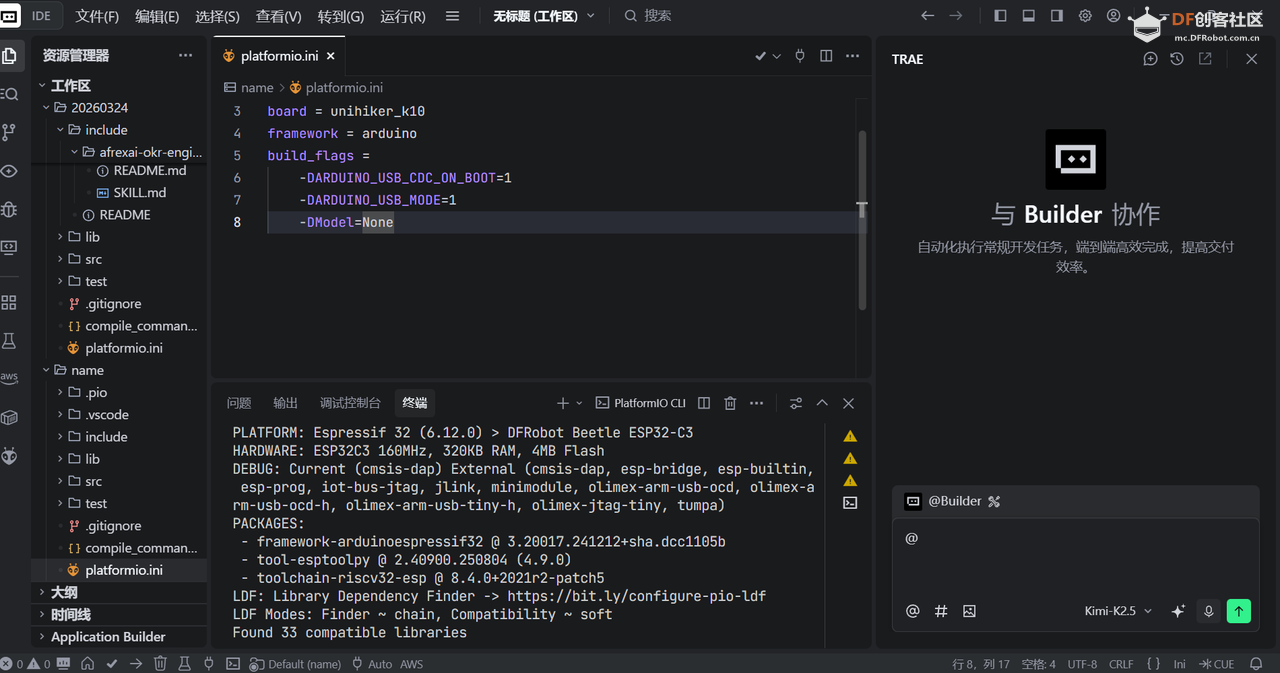 4.2 配置项说明 | 配置项 | 说明 | 示例 | |--------|------|------| | `platform` | 开发平台 | `https://github.com/...` | | `board` | 开发板型号 | `unihiker` | | `framework` | 开发框架 | `arduino` | | `lib_deps` | 库依赖 | `unihiker_k10@^1.0.0` | | `monitor_speed` | 串口波特率 | `115200` | | `upload_port` | 上传端口 | `COM3` | | `build_flags` | 编译选项 | `-D DEBUG` | | `lib_extra_dirs` | 额外库目录 | `./my_libs` | 4.3 添加参考文档 将 K10 的 API 文档放入 `lib/` 目录,方便查阅: ``` lib/ ├── CodeReference_arduinoide.md # API 参考 └── examples_arduinoide.md # 示例代码 ``` 这些文件不参与编译,但可在开发时参考。 这个很重要,在与AI沟通的时候,需要AI参考这2个md文件 5. 简单项目演示 5.1 UNIHIKER 屏幕显示 将以下这段代码贴到main.cpp中 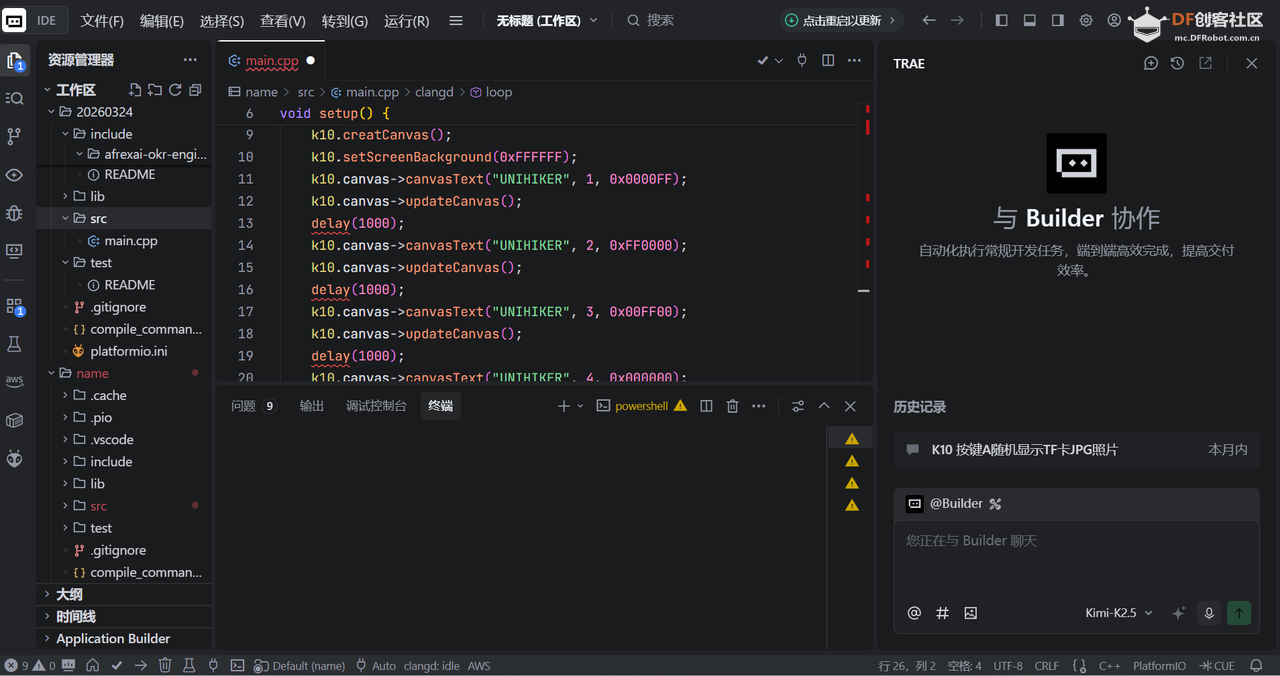 5.2 编译与上传 **编译:** `Ctrl+Alt+B` 或点击底部 ✓ 图标 **上传:** `Ctrl+Alt+U` 或点击底部 → 图标 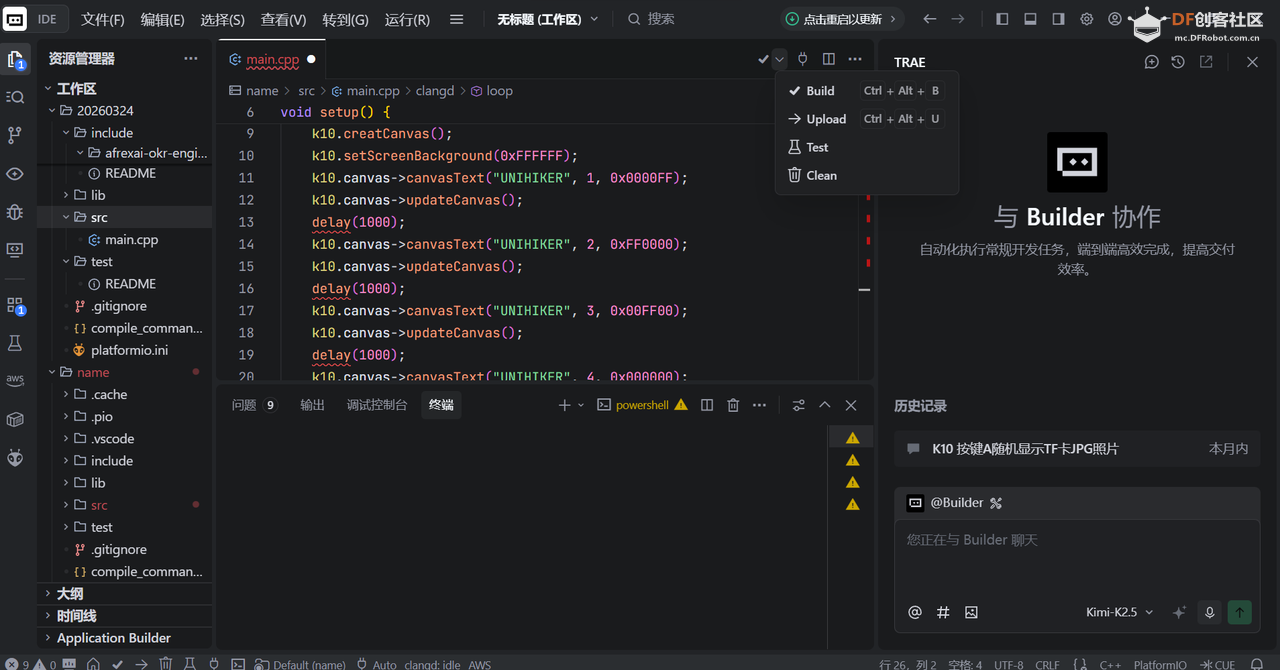 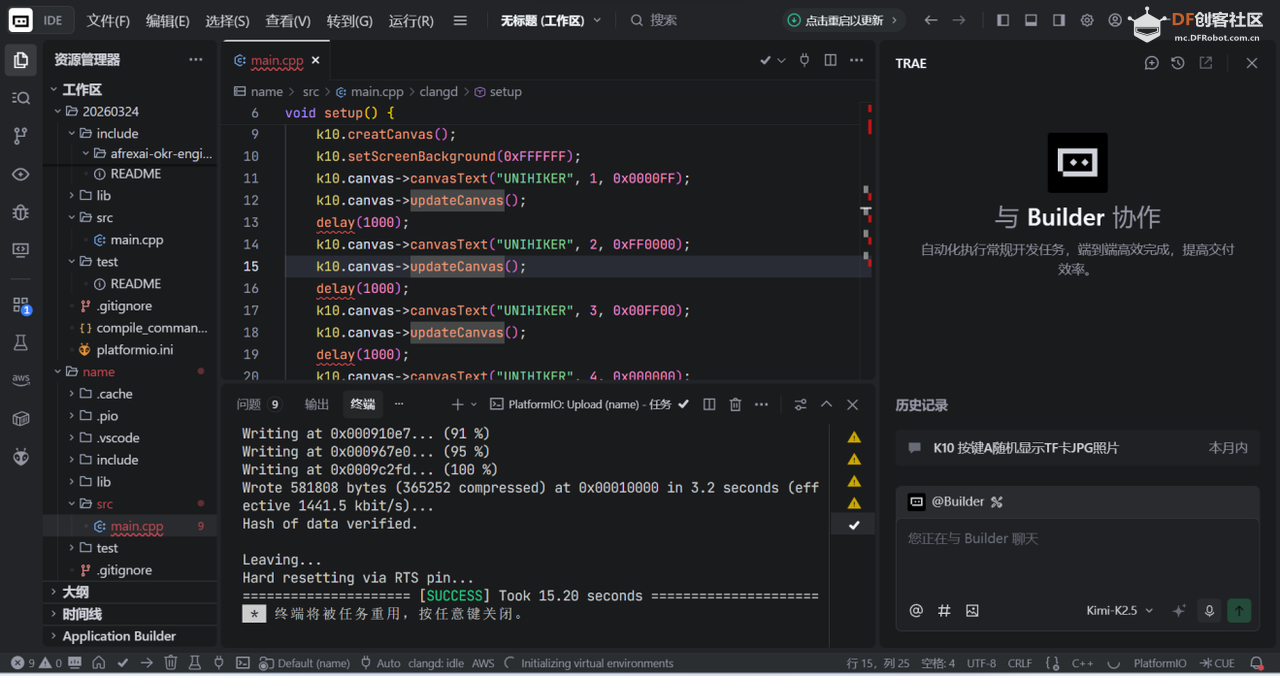  5.3 使用 AI 助手编程 Trae IDE 内置 AI 助手,可以: 示例对话: 先将2段md文件示例代码拖到lib中,在对话框中用“#”引用示例代码,第一次使用的时候,要加上“只修改main.cpp文件”防止ai修改示例代码。每次生成完毕后,要按Ctrl+S保存修改后再上传。 用户:“在K10上画一只猫” 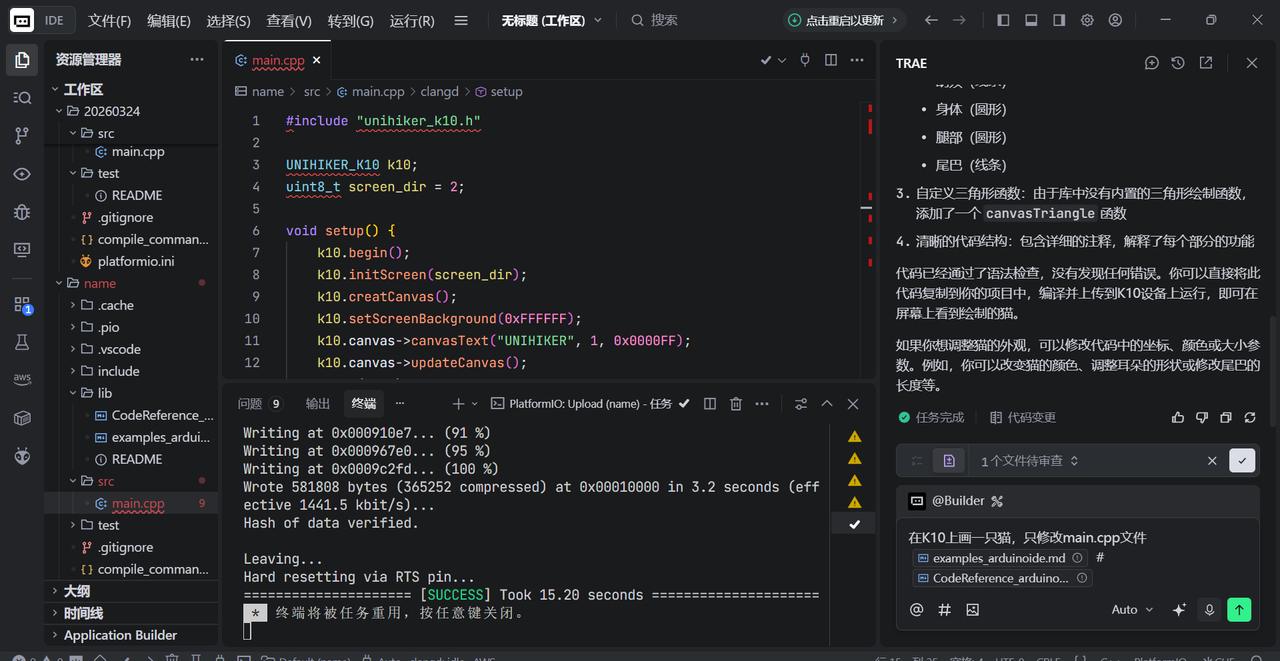 如果遇到排队,就等一下,毕竟是免费的,如果有大模型api可以使用api,就不用排队了。但排队时间不会太久。  上传代码,自动编译 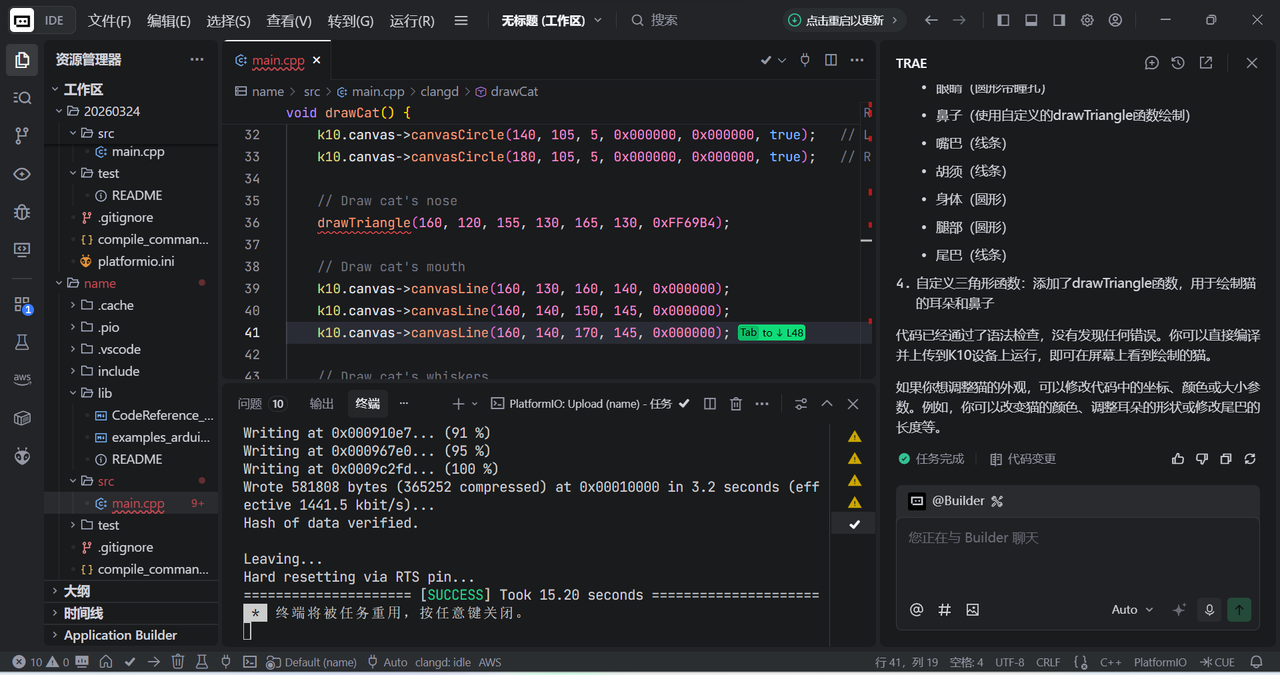 AI:(生成完整代码) 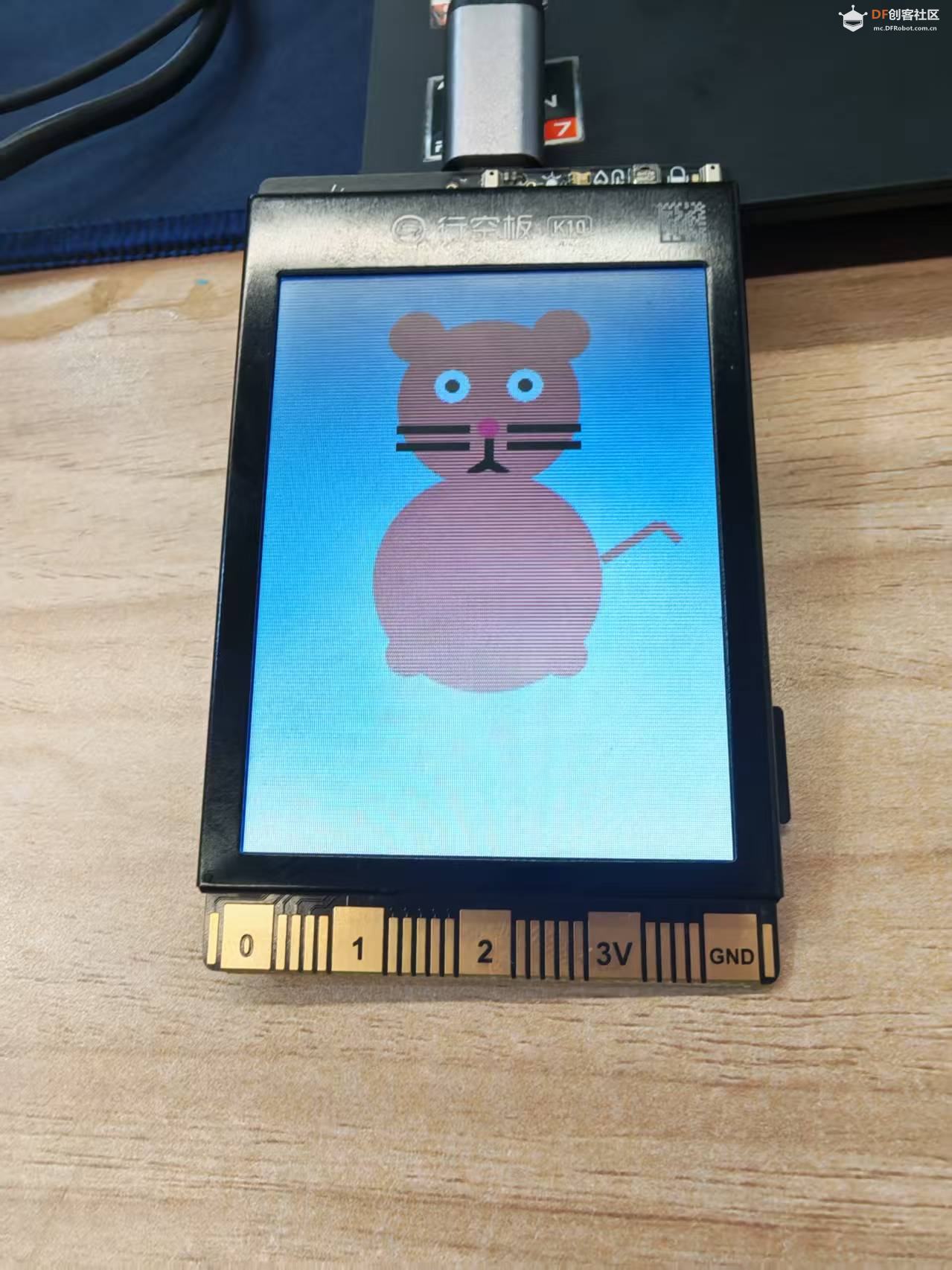 完成后,可以试着玩K10上的各种传感器。 比如: 在K10上画一棵圣诞树,并且在下雪。当摇晃的时候,圣诞树上的雪花也会跟着一起摇晃 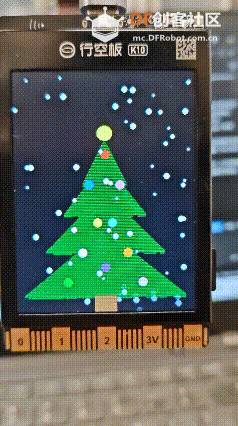 在K10画正樱花和雪花同时落下,当我对着K10吹一口气,利用温湿度传感器的数据,模仿雪花和樱花被风吹过的样子  **AI 助手功能:** - 代码生成 - 代码解释 - 错误修复 - 代码优化 - 文档查询 K10 内置库功能 | 功能模块 | 说明 | |----------|------| | 屏幕显示 | 文字、图形、图片显示 | | 加速度传感器 | 三轴加速度检测 | | 光线传感器 | 环境光强度检测 | | RGB LED | 3 颗可编程彩灯 | | 按键检测 | A/B 按键事件 | | SD 卡 | 文件读写、图片存储 | | 音频播放 | 内置音乐、SD 卡音频 | | AI 识别 | 人脸、二维码、手势识别 | | 语音识别 | 中英文语音命令 | --- 7. PlatformIO + K10 的优势 7.1 相比 Arduino IDE | 特性 | Arduino IDE | PlatformIO | |------|-------------|------------| | 代码补全 | ❌ 基础 | ✅ 智能 | | 项目管理 | ❌ 单文件 | ✅ 多文件/模块化 | | 库管理 | 手动安装 | 自动依赖管理 | | 版本控制 | ❌ 不支持 | ✅ Git 集成 | | 多环境配置 | ❌ 困难 | ✅ 多环境支持 | | 调试功能 | ❌ 有限 | ✅ 强大调试器 | | 单元测试 | ❌ 不支持 | ✅ 内置测试框架 | | AI 辅助 | ❌ 无 | ✅ Trae 内置 AI | ## 总结 使用 **Trae IDE + PlatformIO** 开发行空板 K10,可以享受: ✅ **AI 辅助编程** - 自然语言生成代码,降低入门门槛 ✅ **专业开发环境** - 代码补全、调试、版本控制 ✅ **便捷库管理** - 自动依赖,一键安装 ✅ **团队协作友好** - 配置即代码,环境一致 ✅ **持续集成支持** - 自动化测试部署 希望这篇教程能帮助你快速上手 K10 开发! 参考资源 -Trae IDE 官网:https://www.trae.ai/ - PlatformIO 文档:https://docs.platformio.org/ - K10 库文档:https://www.unihiker.com/ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






