2013年的元旦刚刚才过,新年的第一篇文章发出,以纪念过去的三年博客写作生涯。自己选择的创客之路,得失没啥可说的,只有抱着淡定之心,继续详细记录我的作品制作过程,写给自己,也分享给大家。
这篇文章介绍MM7361三轴加速度传感器的原理及应用。为了体验下这个传感器反馈物体运动姿态的功效,我设计了一个互动任务,任务为:根据MM7361加速度传感器绕坐标轴的倾斜角度,实时作用于Processing虚拟环境下的幻彩立方,使其旋转三维空间角度,让由Arduino采样的加速度传感器与幻彩立方产生互动效应。
视频链接:https://v.youku.com/v_show/id_XNDkxMzY1ODM2.html (已被屏蔽)
MM7361三轴加速度传感器 是基于加速度的基本原理去实现工作的,加速度是个空间矢量,一方面,要准确了解物体的运动状态,必须测得其三个坐标轴上的分量;另一方面,在预先不知道物体运动方向的场合下,只有应用三轴加速度传感器来检测加速度信号。通过测量由于重力引起的加速度,你可以计算出设备相对于水平面的倾斜角度。通过分析动态加速度,你可以分析出设备移动的方式。三轴加速度传感器具有体积小和重量轻特点,可以测量空间加速度,能够全面准确反映物体的运动性质,在航空航天、机器人、汽车和医学等领域都得到了广泛的应用。
MMA7361三轴加速度传感器是替代停产的MMA7260三轴加速度传感器,MMA7361三轴加速度传感器芯片,对于普通的互动应用来讲应该是种不错的选择,可以应用到摩托车和汽车放倒报警、遥控航模、游戏手柄、人形机器人跌倒检测、硬盘冲击保护、倾斜度测量等场合。
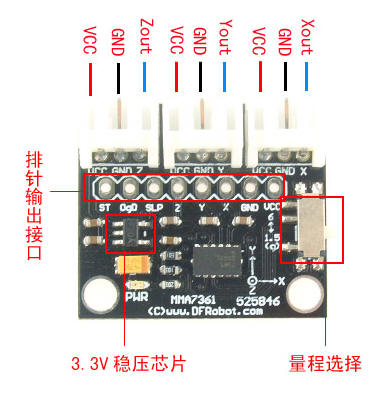
图2 MM7361三轴加速度传感器
MMA7361三轴加速度传感器把加速度分解成X、Y和Z三个方向上的分量,并产生相应的三个0~5V的电压值输出,然后从MM7361传感器的三个模拟量输出端,连线到Arduino控制器的模拟端口0、1、2上。如图3所示,接着Arduino控制器的10位模数转换器把它们转换成0~1023的整数值。
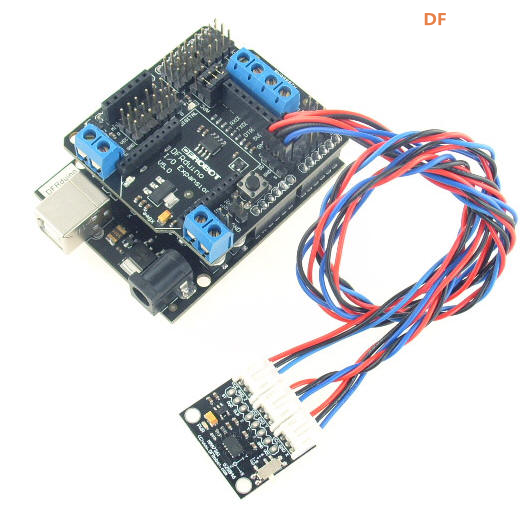
图3 Arduino控制器与MM7361加速度传感器的连线图
图3中的电控设备有:
1、Arduino UNO控制板;
2、Xbee传感器扩展板V5;
3、MMA7361三轴加速度传感器。
这三个电控部件全部由DFRobot公司出品,公司网址:www.dfrobot.com.cn/ 。这个传感器的说明书网址:点击前往。
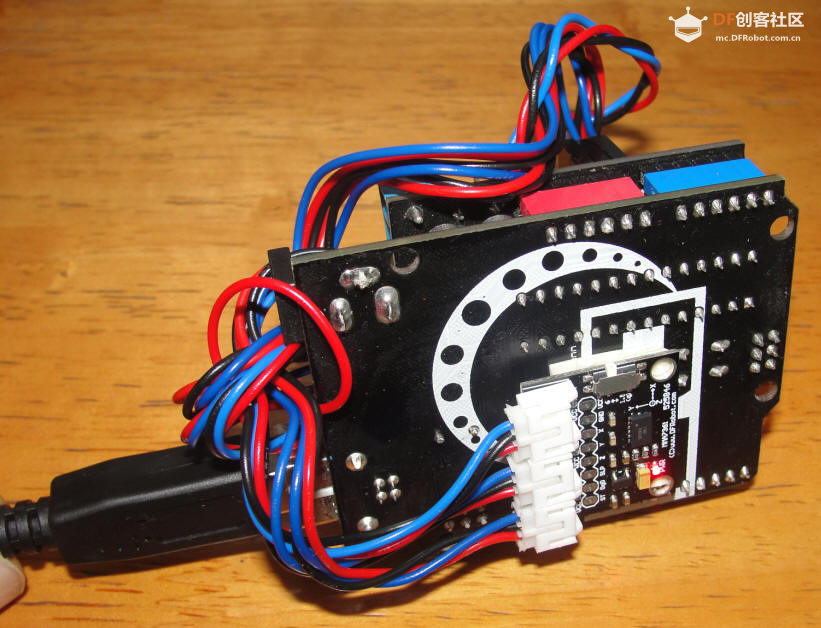
图4 Arduino控制器与MM7361加速度传感器的安装图
看图2所示,MMA7361加速度传感器提供了±1.5g/6g两个量程,用户可通过开关选择这2个灵敏度。制作这个互动作品时,我选用了灵敏度高的±1.5g量程,高灵敏度量程所产生的加速度转换值的分辨率高,数值变化范围大,体现在Processing幻彩立方的旋转动作上,就更加平顺。注意:实验视频中,我选用了6g量程,所以幻彩立方旋转地不够平顺。
原先我一直不理解通过加速度传感器是如何了解设备相对于水平面的倾斜角度的,实际上只要实践下,这个问题无师自通。首先如图4所示,我把加速度传感器用双面胶带粘在Arduino控制器的背面,插上USB数据线,形成一个体感设备,再把如下测试程序,写入Arduino控制器,通过Arduino IDE编程环境中串口监视器,如图5所示,观测体感设备旋转时,X、Y和Z轴三个分量上加速度转换值的变化。
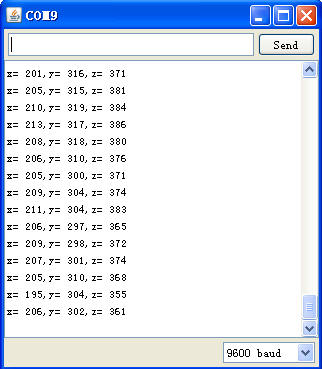
图5 Arduino IDE编程环境中的串口监视器
void setup()
{
Serial.begin(9600); //启动串行通信,波特率为9600bps
}
void loop()
{
int x,y,z;
x=analogRead(0); //采集重力加速度X轴分量的转换值,输入到模拟端口0
y=analogRead(1);//采集重力加速度Y轴分量的转换值,输入到模拟端口1
z=analogRead(2);//采集重力加速度Z轴分量的转换值,输入到模拟端口2
//把重力加速度X、Y和Z轴分量的转换值上传到上位机串口监视器
Serial.print("x= ");
Serial.print(x ,DEC);
Serial.print(',');
Serial.print("y= ");
Serial.print(y ,DEC);
Serial.print(',');
Serial.print("z= ");
Serial.println(z ,DEC);
delay(800);//延时0.8s,以便有足够时间观测各加速度分量值的变化
}
如何通过以上程序,来标定加速度转换值与绕轴旋转的角度之间的关系?方法是:根据图6所示三轴坐标系定义,把体感设备放置水平,它的三个模拟量输出端朝后,另一端朝前至Y轴。这时让设备向左旋转到90度垂直位置,记录下X轴加速度分量是175,而传感器向右旋转至垂直位置,这个分量值为495。然后把设备恢复到水平位置,这时再绕X轴向后旋转90度垂直位置,记录下Y轴加速度分量是195,而传感器向前旋转至垂直位置,这个分量值为525。
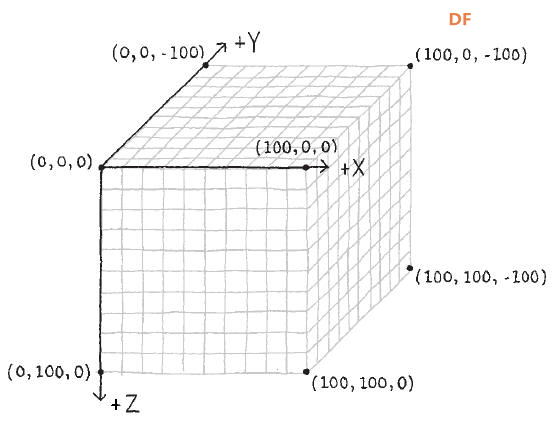
图6 X、Y和Z轴坐标系定义
通过观测,我们发现了重力加速度X、Y分量转换值与绕Y轴和X轴旋转角度的对应关系,并标定如下:X轴加速度分量175~495对应Y轴旋转角度-90度~+90度。Y轴加速度分量195~525对应X轴旋转角度值-90度~+90度。可以通过下面的Arduino程序中map( ) 函数,建立这个算式,并把绕Y轴和X轴旋转的两个角度值以字节形式上传Processing软件处理。为了使上传的角度值不出现负数,我把-90~+90度值等效为0~180度。
注意:如果您也用MMA7361传感器做项目,希望再重新标定一下,重力加速度X、Y分量转换值与绕Y轴和X轴旋转角度的对应关系。
以下Arduino程序与Processing程序的串行通信部分,我用红色字体标注出来。
Arduino程序:
//初始化
void setup() {
Serial.begin(9600);//启动串行通信,波特率为9600b/s
}
//主程序
void loop() {
//把MM7361加速度传感器重力加速度的X、Y、Z轴分量,分别接入
//Arduino控制器的模拟量端子0、1、2。
int xValue = analogRead(0);
int yValue = analogRead(1);
int zValue = analogRead(2);
/*当Arduino稳压后的电压为5V(实测为4.95v~4.97v),并选择±1.5g量程时
先把加速度传感器放置水平,若定义前方是Y轴,那么传感器向左旋转至90度垂直位置,
则重力加速度X轴分量xValue值标定为175,而传感器向右旋转至垂直位置,xValue值为495。
*/
//把绕Y轴旋转180度的两个特定位置的xValue值175~495转换成角度值0~180
int yRotate=map(xValue,175,495,0,180);
//把绕X轴旋转180度的两个特定位置的yValue值195~525转换成角度值0~180
int xRotate=map(yValue,195,525,0,180);
if(yRotate<=0) yRotate=0;//如果绕Y轴旋转的角度值出现负数,则强制为0
if(xRotate<=0) xRotate=0;//如果绕X轴旋转的角度值出现负数,则强制为0
Serial.print(yRotate,BYTE);//以字节形式,上传绕Y和X的旋转角度值
Serial.print(xRotate,BYTE);
delay(100);//延时100ms
}
在Processing环境下,创建一个幻彩立方,并接受Arduino程序上传的两个绕Y轴和X轴的角度信息。由于体感设备位于水平位置时,是幻彩立方的初始状态。体感设备旋转时,则幻彩立方也随之顺时针或逆时针旋转,所以Processing程序要把Arduino上传的0~180度角度值通过下面程序中蓝色字体标注的算式转换为-90~+90度,然后通过rotateX( )和rotateZ( )函数来旋转变换幻彩立方。
Processing程序:
import processing.serial.*; //导入serial通信库
Serial duankou;//创建对象duankou
int Y_Rotate=90, X_Rotate=90;
void setup()
{
size(800,600, P3D); //设置画布尺寸,创建3D环境
stroke(102); //图形线条颜色为灰色
strokeWeight(20);//图形线条的宽度
colorMode(RGB, 1);
//设定通讯端口为COM3,波特率为9600
//(Arduino与Processing联机的串口号COM?可以通过设备管理器观查得到。)
duankou = new Serial(this,"COM3",9600);
}
//主程序
void draw()
{
background(0.5); //设置画布背景颜色
pushMatrix(); //把当前坐标值保存在堆栈中
//把坐标原点移动到画布中央,同时向屏幕后移动-150
translate(width/2, height/2, -150);
while(duankou.available()<3);//读取Arduino上传的两个字节
Y_Rotate= duankou.read();//第一个字节反映了加速度传感器,绕Y轴的旋转角度
X_Rotate = duankou.read();//第一个字节反映了加速度传感器,绕X轴的旋转角度
//把Arduino上传的0~180度值转换为-90~+90度
rotateX((X_Rotate-90) * PI / 180.0);//使幻彩立方旋转
rotateZ((Y_Rotate-90) * PI / 180.0);
scale(150);//放大1个单位的立方体到150倍
beginShape(QUADS);//定义单位边长为1的幻彩立方体
fill(0, 1, 1); vertex(-1, 1, 1);
fill(1, 1, 1); vertex( 1, 1, 1);
fill(1, 0, 1); vertex( 1, -1, 1);
fill(0, 0, 1); vertex(-1, -1, 1);
fill(1, 1, 1); vertex( 1, 1, 1);
fill(1, 1, 0); vertex( 1, 1, -1);
fill(1, 0, 0); vertex( 1, -1, -1);
fill(1, 0, 1); vertex( 1, -1, 1);
fill(1, 1, 0); vertex( 1, 1, -1);
fill(0, 1, 0); vertex(-1, 1, -1);
fill(0, 0, 0); vertex(-1, -1, -1);
fill(1, 0, 0); vertex( 1, -1, -1);
fill(0, 1, 0); vertex(-1, 1, -1);
fill(0, 1, 1); vertex(-1, 1, 1);
fill(0, 0, 1); vertex(-1, -1, 1);
fill(0, 0, 0); vertex(-1, -1, -1);
fill(0, 1, 0); vertex(-1, 1, -1);
fill(1, 1, 0); vertex( 1, 1, -1);
fill(1, 1, 1); vertex( 1, 1, 1);
fill(0, 1, 1); vertex(-1, 1, 1);
fill(0, 0, 0); vertex(-1, -1, -1);
fill(1, 0, 0); vertex( 1, -1, -1);
fill(1, 0, 1); vertex( 1, -1, 1);
fill(0, 0, 1); vertex(-1, -1, 1);
endShape();//结束立方体的造型
popMatrix(); //从堆栈中复原当前坐标值
}
看图4所示的由Arduino控制器与MMA7361加速度传感器组成的体感设备,这次实验是采用USB供电并传送数据的,但如果您想做个蓝牙无线体感设备,对于设备的电池盒供电电压要特别注意:要求电源电压应大于6.5V,因为小于6.5V的电源,Arduino控制板上的板载稳压电路不能把电压稳定于5V,实测电压是4.95V,而若稳压后产生电压值不同,我发现MMA7361传感器输出的加速度转换值也是不同的,而且电压越低,加速度转换值越大,所以如果想得到唯一不变的加速度值,则为体感设备选择的电源应在6.5V到9V之间,这样在精准的4.95V电压下,加速度值与旋转角度的关系标定仅需一次即可。
另一个值得注意的是:采集得到的加速度传感器转换值,不可不免地会出现小范围的跳动,但这样的小幅跳动并不影响对被测物体空间姿态的判断,也不影响对物体一定程度加速度运动变化的判断。以后的作品中,我将进一步做MMA7361传感器的应用,制作一个无线蓝牙体感手柄去遥控一个云台摆动迷宫。
经常有人在QQ群和论坛里问我,你做的东西到底有什么实际意义?我想即使我苦口婆心地说教,他们依然会感到无奈,所以不如放轻松些,姑且把这些作品归类于科技娱乐。看看国外极客们是怎样玩《愤怒的小鸟》互动作品吧,作为中国大陆人士是否也可以去尝试这样做呢。



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







