|
2848| 1
|
基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《... |

|
本帖最后由 ckkk 于 2025-10-2 13:51 编辑 基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《智慧护眼精灵》项目设计2 六、熟悉行空板K10 行空板K10是一款专为快速体验和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等人工智能项目。  1.主要特点:
2.板载功能: 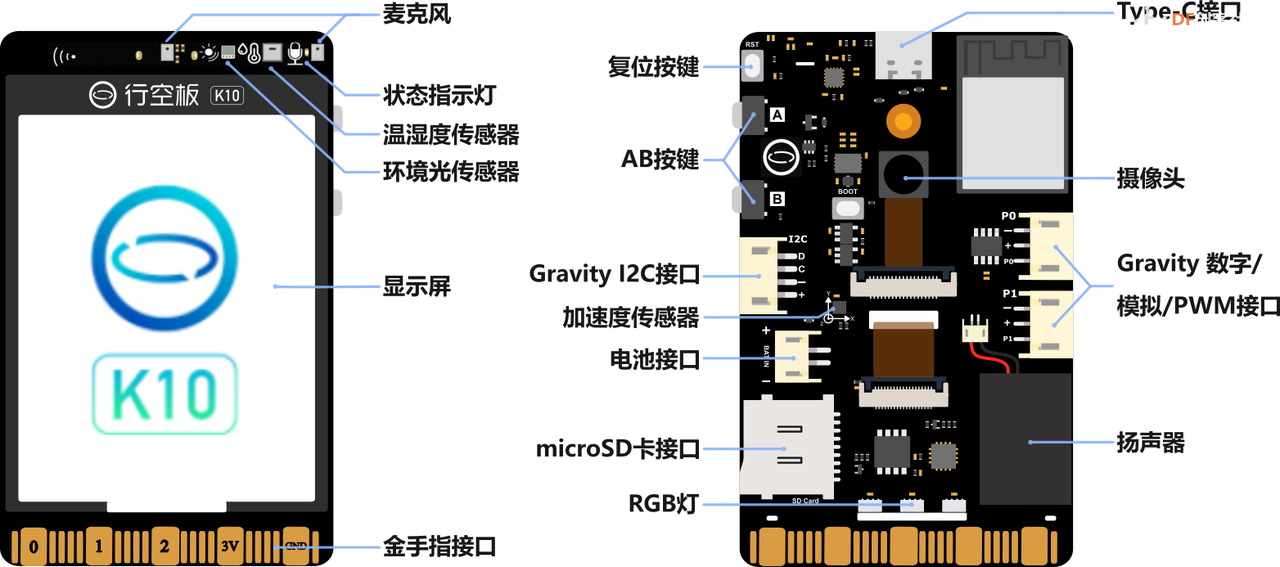 板载功能详细描述见行空板K10的官方教程。 3.接口说明: 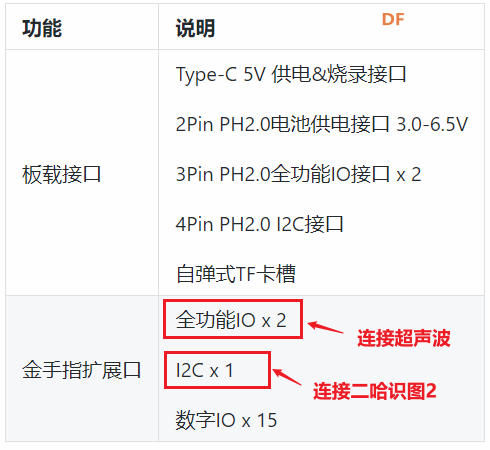 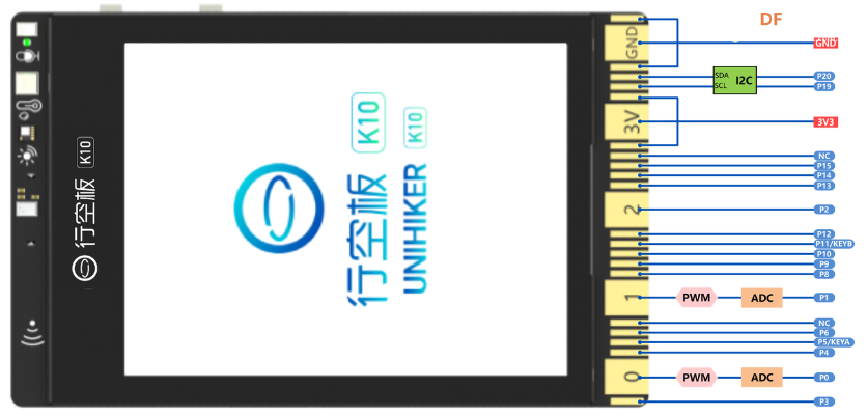 4.电路连接: 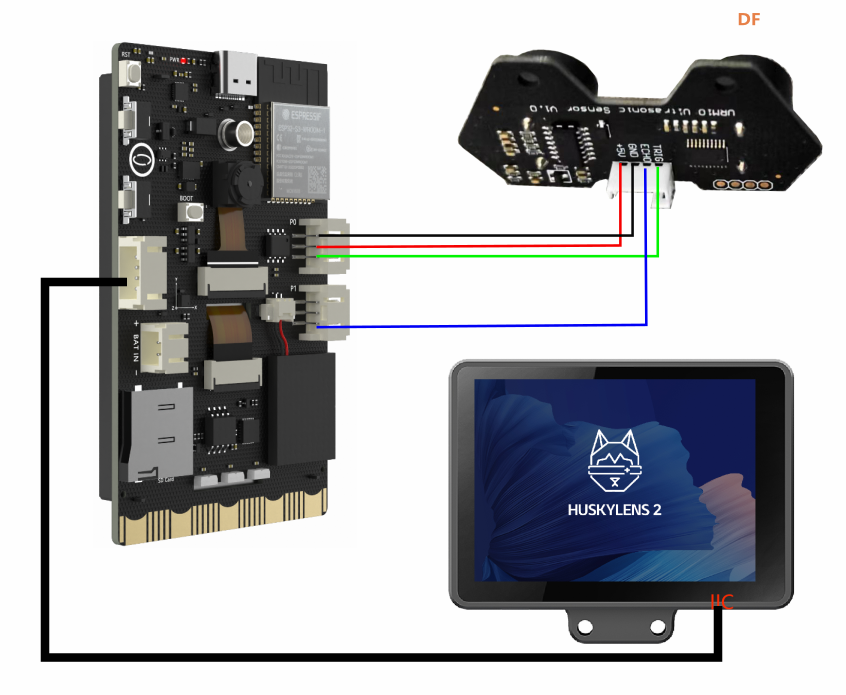 5.Mind+编程:  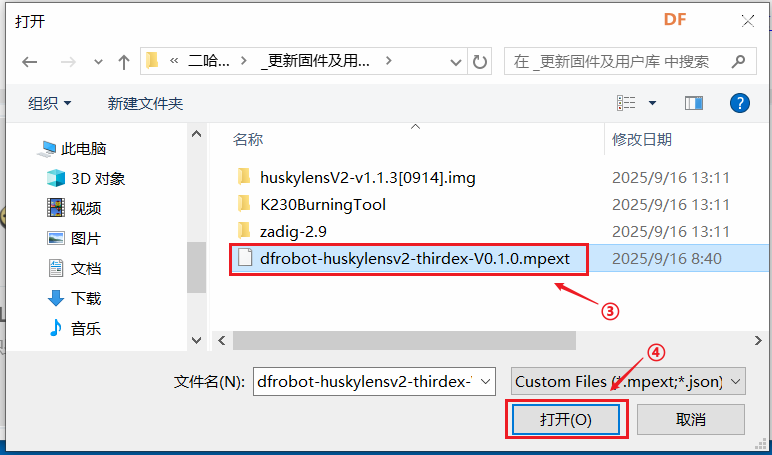  或通过搜索“huskylensv2”添加最新库。  (2)Mind+图形直接加载“主控板”中的“行空板K10”、“传感器”中的“超声波”及“用户库”中的“HuskyLens 2摄像头”等模块。如下图所示。 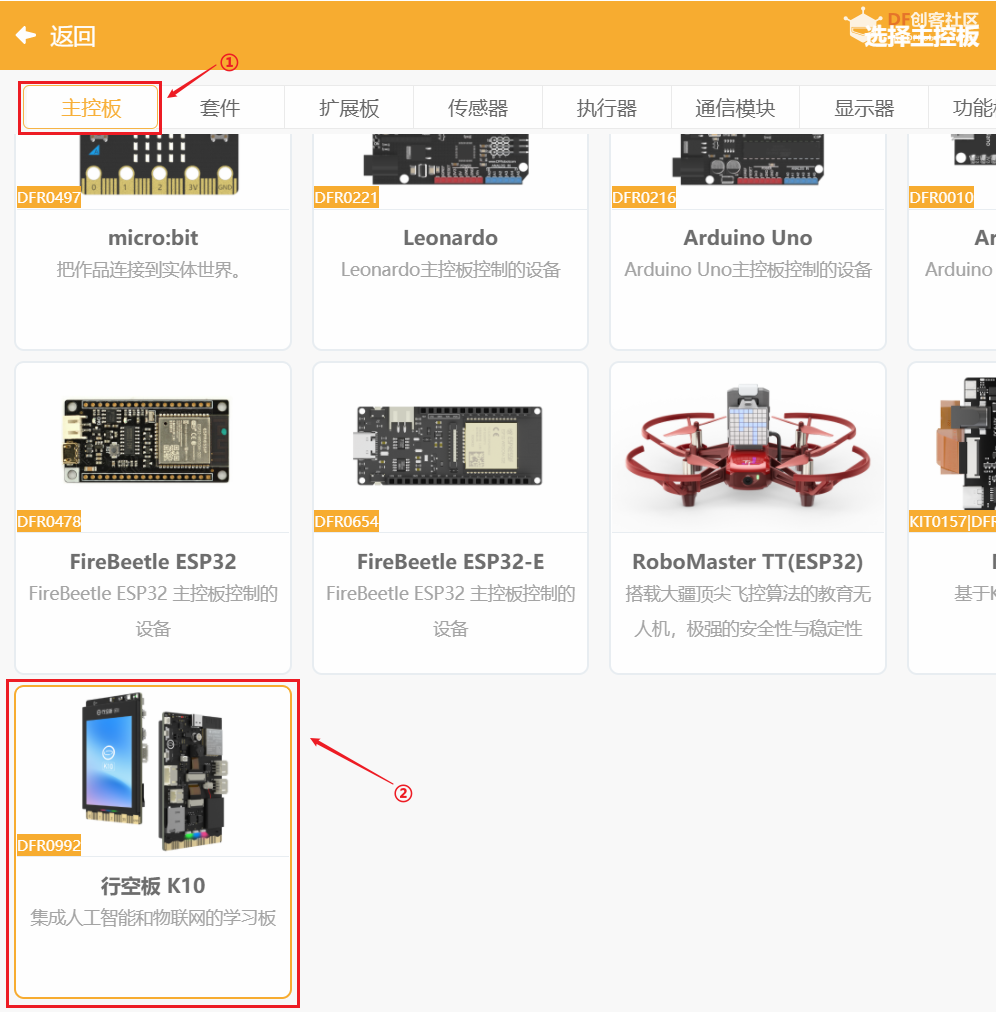   (3)环境监测 Mind+编程基础请参阅行空板K10官方教程,这里不再赘述。 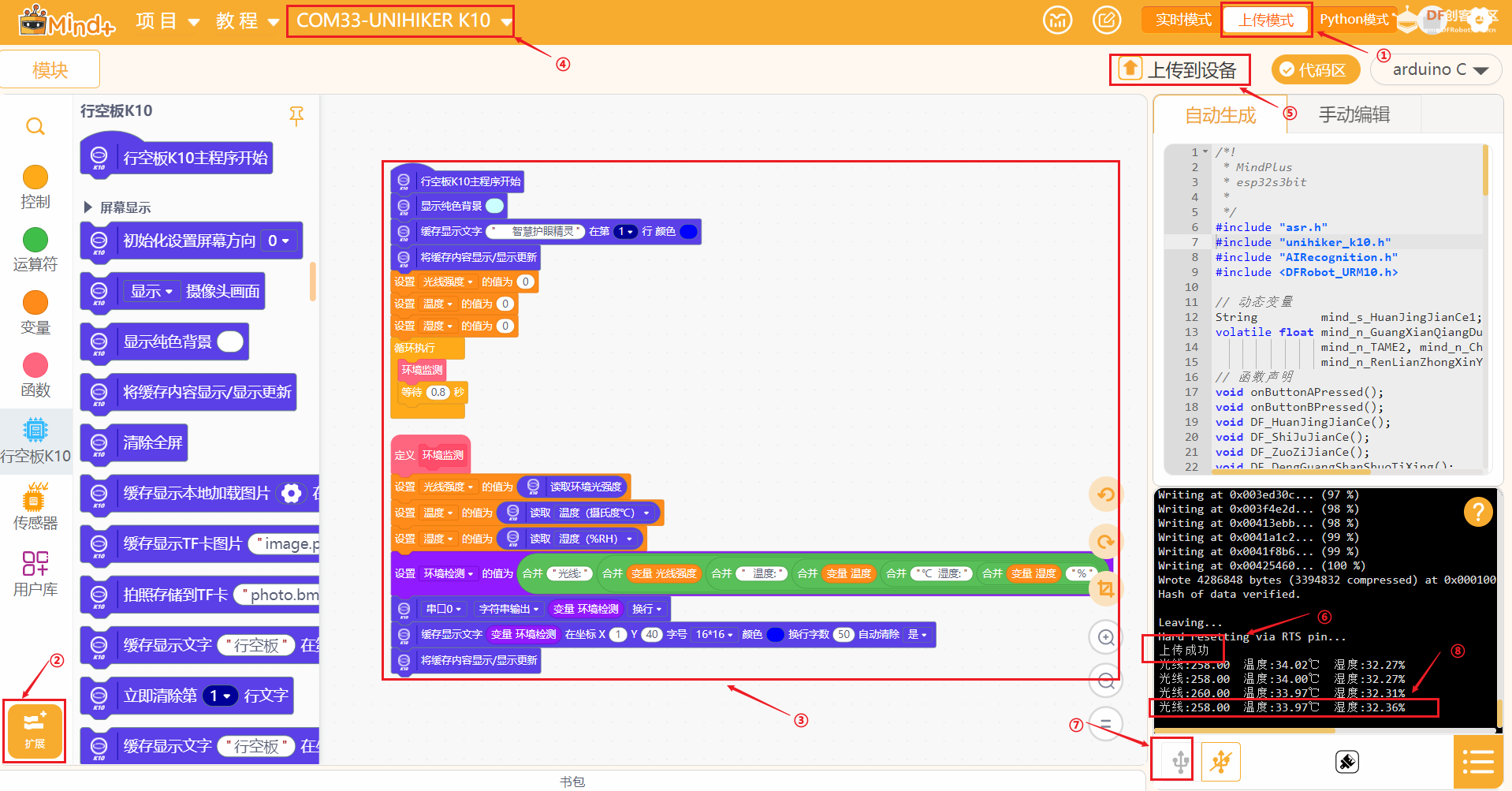 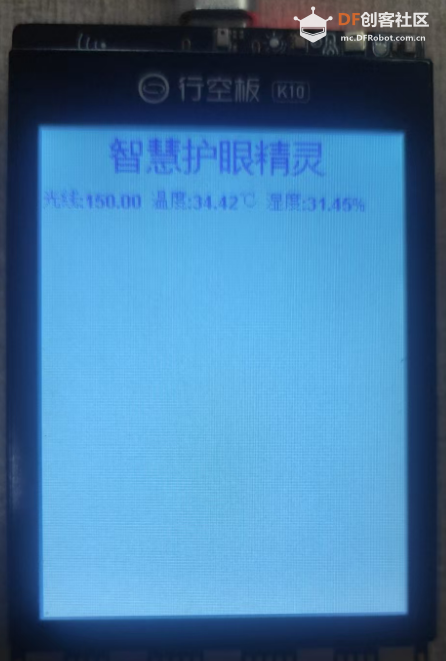 (4)视距监测 ①行空板K10与超声波传感器的实物连接,如下图所示。 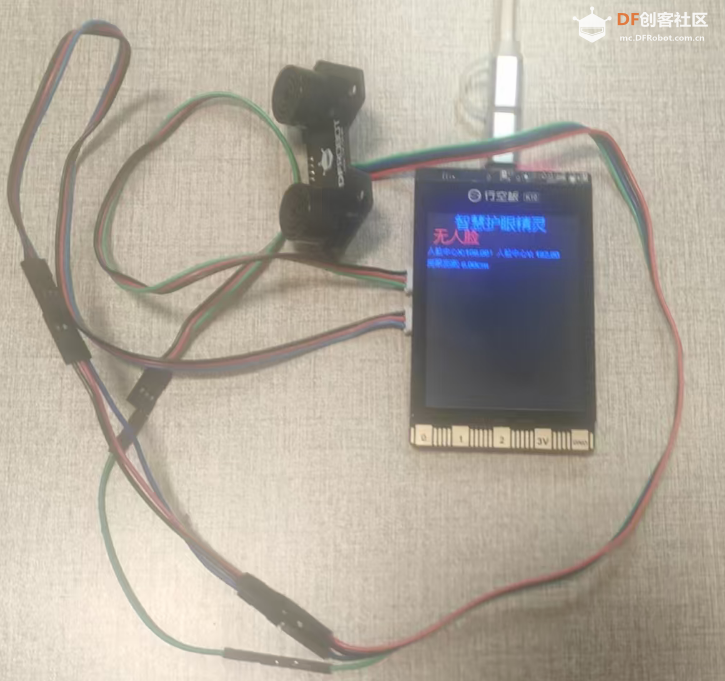 ②Mind+编程,当检测到人脸时,才用超声波测距,此时才认为是“用眼距离”,如下图所示。  七、姿态监测 1.实物连接图: 行空板K10与二哈识图2实物连接,如下图所示。  2.Mind+编程: 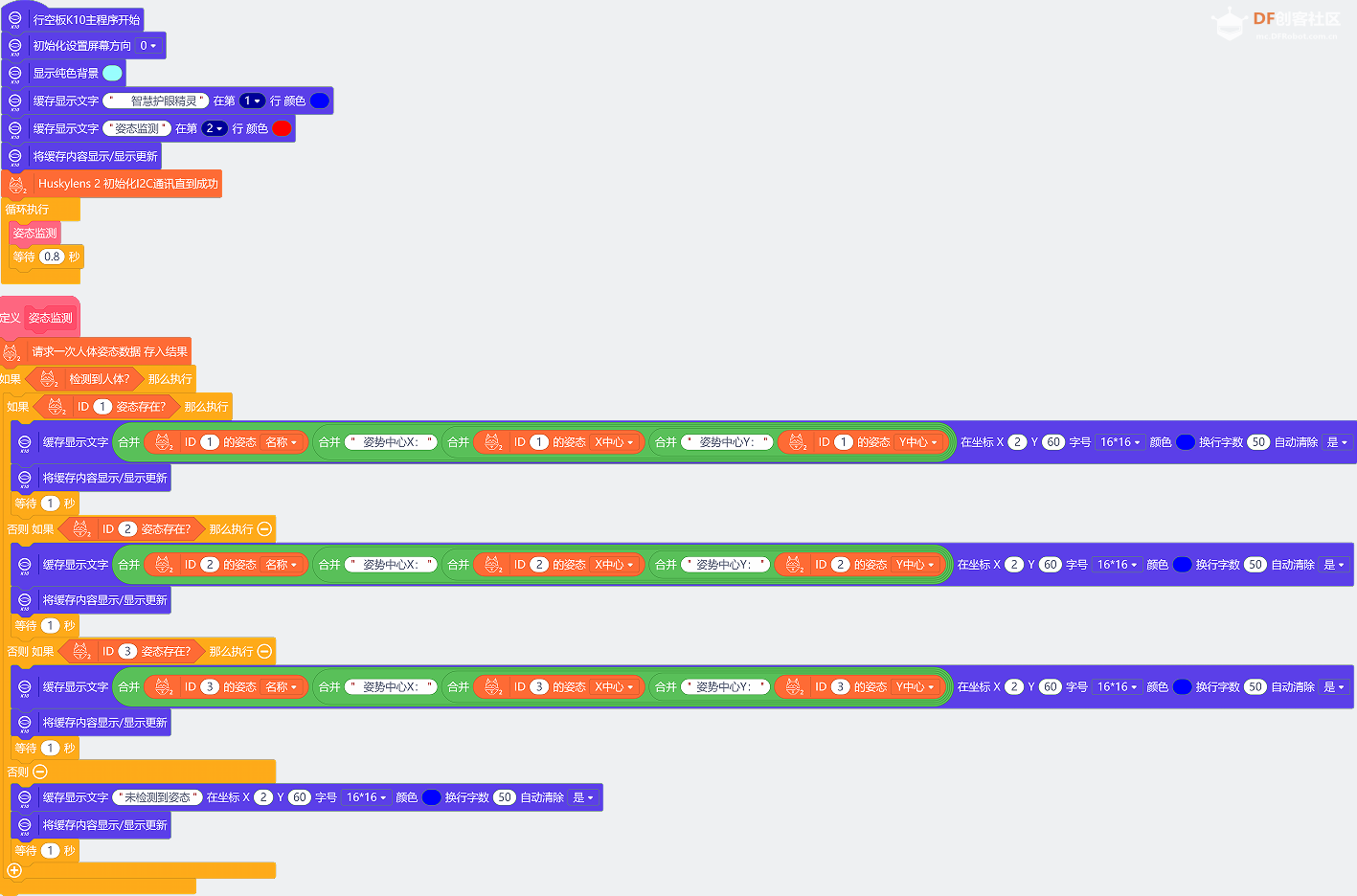 3.测试效果: 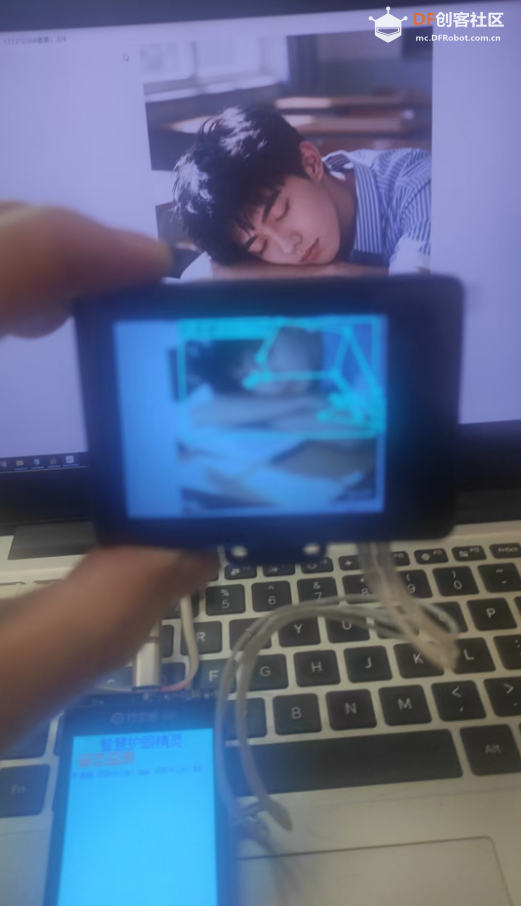 系列教程链接: 二哈识图2 +掌控板+micro:bit掌控IO扩展板+超声波+本地DeepSeek——《智慧护眼精灵》 二哈识图2 +行空板M10+M10扩展板组合+超声波+本地DeepSeek——《智慧护眼精灵》 |
用眼监测图片

dfrobot-huskylensv2-thirdex-V0.1.4.zip
1.77 MB, 下载次数: 2001
二哈识图2用户库
1.3 MB, 下载次数: 1923
环境监测
168.13 KB, 下载次数: 1913
用眼监测
1.3 MB, 下载次数: 1992
姿态监测



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






