本帖最后由 Angelo 于 2016-3-24 19:39 编辑
曾经有一个萌萌的机器人在LZ的面前, 可以让我像谢耳朵一样宅在家里, 可是LZ却没有珍惜它.
在 LZ 长达两天的摧残下, 他从这样变成了这样:
请细细体会保龄球馆老版的心情….
这具尸体躺在这里快半年了, 就在今天, 它又再次复活!!! 成了办公室里面的装饰品~~
想知道半年前它发生了什么, 各位客官请继续往下看
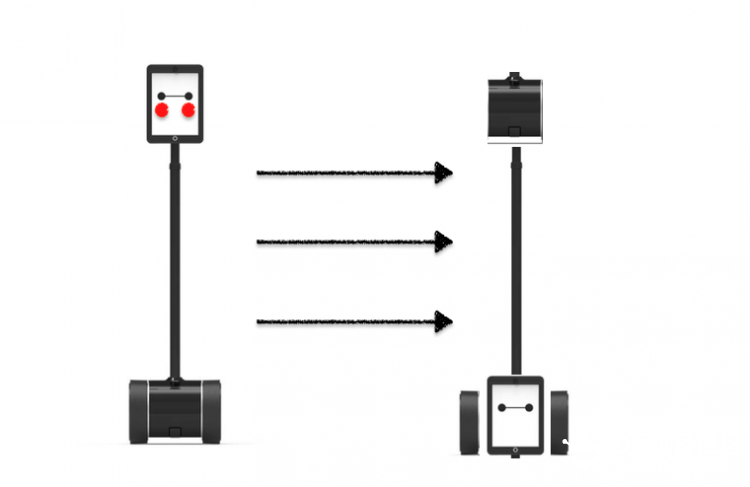
- 开始它是长这样的, 放上一个 IPad 整体效果非常的干净, 自平衡的两个大轮子, 可伸缩细杆, 远程控制. 满满得创客风
- 两边铝合金的金属档片,遮住里面的 LED 小灯模块. 让光线更加自然.
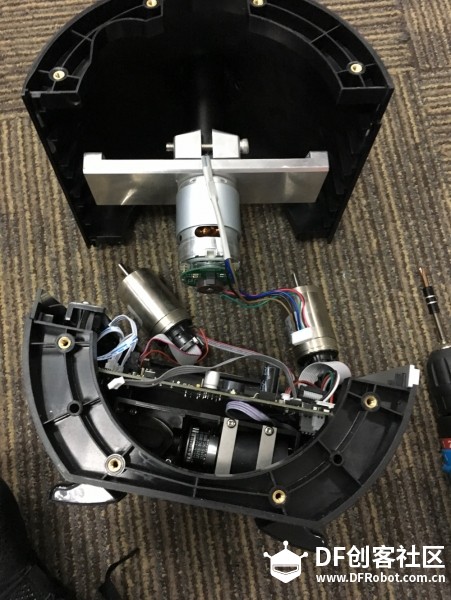
- 传动装置采用两级减速, 皮带传动, 减小噪音的同时还可以使得传动机构更加扁平化
- 为了保证上部伸缩杆的稳定性, 不惜成本的大量采用了铝合金件来提高刚性. 估计全是 CNC 出来的... 就一个字, 贵.
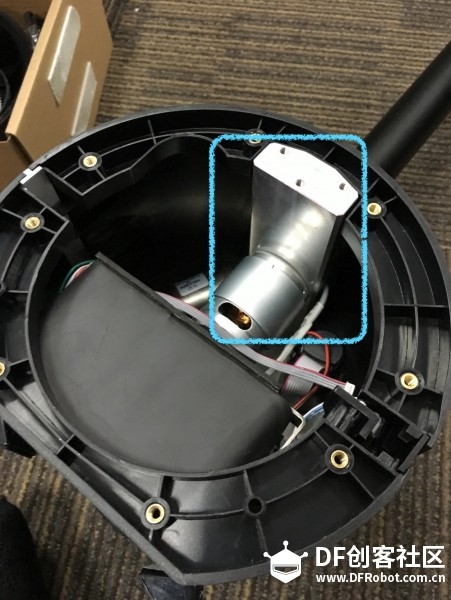
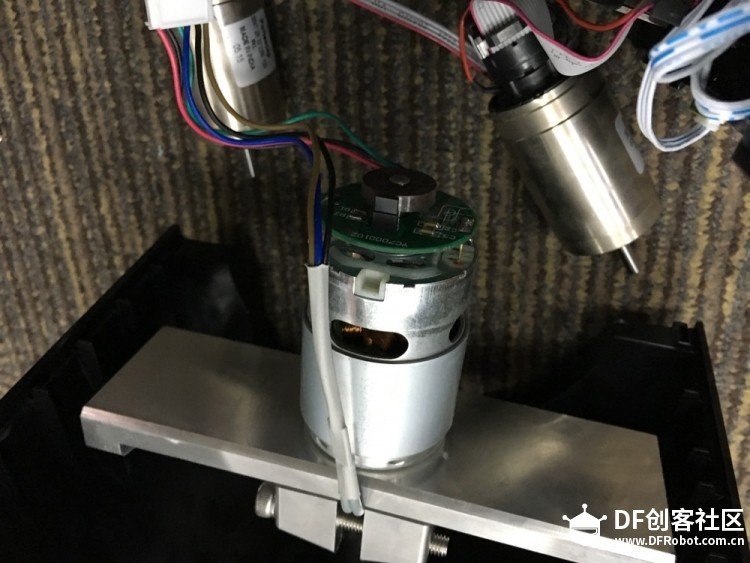
- 驱动轮子的电机采用的是带编码器, 电机的品质不错. 不带减速箱也应该是想要减小机器的宽度.
- 伸缩杆的电机看上去就非常结实, 应该也是为了稳定性而特别定制的, 上面带有编码器. 但从接线的数量上来看, 似乎并没有使用.
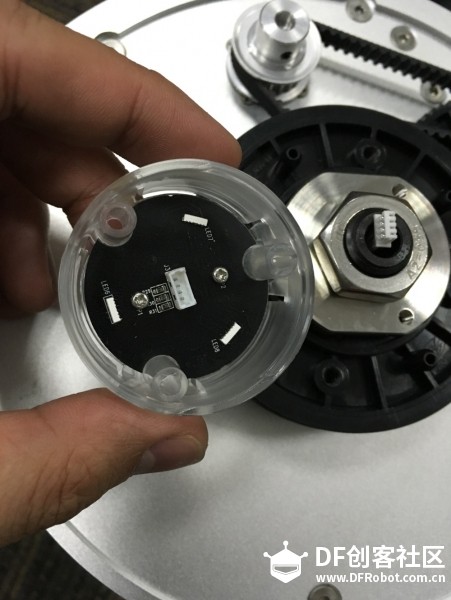
- 前方搭载了三个夏普距离传感器, 可以用于壁障. 右侧的传感器应该是故意反装的, 可能是考虑到传感器发射口和接收口的位置.
- PCB 板子的做工不错, 直接采用了蓝牙模块. 整个板子的布局比较紧凑, LZ 有点担心散热的情况.
- 底部支撑脚座, 机器人停下来的时候, 脚座会自动打开, 采用蜗轮蜗杆和皮带进行传动.
- 电机和内部丝杆的连接采用梅花弹性联轴器, 减少噪音的同时还可以允许少量的偏心.
- 伸缩管内部结构, 里面含有两个温度传感器. 里面是丝杆传动. 顶部的毡毛利于在伸缩杆中滑动.
- 顶上的 Ipad 是需要倒置防止的, 通过底下的反射镜, 可以使用后置摄像头, 拍到地面的路况. 也是非常有意思的设计.
完成了拆解工作之后, LZ一声感叹, 用料太良心了, 完全对得起它的价格. 有些设计上的点也挺有意思, 值得借鉴
最后, 献上一幅平衡车全家福. (私以为左边那个最漂亮 ) )

|
|
|
|
|
|
|
|
|
|






















 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








