|
32534| 16
|
[讨论] 使用树莓派Zero制作一架APM四轴无人机 |
 最近5美元的树莓派Zero开售。1GHZ的ARM11,512MB的内存,相对于传统的单片机作为飞行控制板,还是比较有优势的。尤其Erle Robotiics公司致力于开源的Linux自动驾驶系统的研发,让linux 作为飞控发挥了很多想象力。Linux作为控制系统的优势在于良好的可扩展性,可以运行非常复杂的算法,控制系统可以完成更为复杂的功能。但是linux不想单片机那样实时性很强,对于实时性要求很高的场合,Linu相对有劣势。但是没有关系,随着主频越来越高,这个问题会得到很好的解决。 虽然树莓派Zero还没有在国内大量上市,但是不妨碍我们在这里折腾。接下来就介绍如何用树莓派Zaero完成一个自动驾驶仪。 这个项目主要用到的零件主要来自Erle Robotics(一个使用Linux系统的开源四轴飞行器项目)。Erle Robotics,这是一个使用Linux系统的开源四轴飞行器项目。他们的口号是:“Building the nxt generation of educational drones”。 需要的硬件: Erle Robotics PXFmini Raspberry Pi Zer 四轴飞行器的基础部件(机架,电调,电池,GPS模块)  Erle Robotics PXFmini接入树莓派 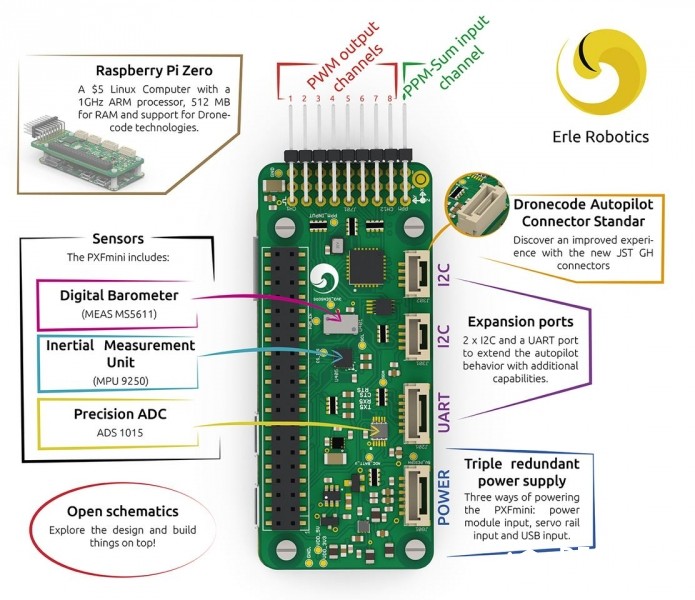 Erle Robotics PXFmini板 Erle Robotics PXFmini的板子主要是一些传感器接口。无人机系统采用实时性能优良的Linux 内核,基于Debian系统。无人机的 PXFmini飞控系统电路板采用的APM飞控程序,当然来自 Erle Robotics项目。 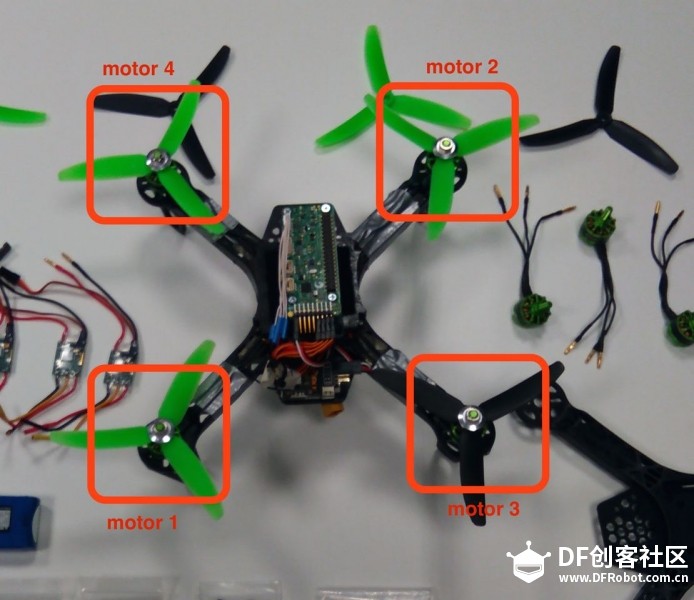 这是详细的转接口熟悉飞控的同学很容易看懂。  这是组装的具体效果图 有树莓派和APM飞控基础的同学,组装起来应该不是很困难,等到树莓派Zero发布了,届时本站会给大家出一个视频教程,以供大家参考。 |
dsweiliang 发表于 2016-6-26 08:52 好像不是呀,这个真的是用RPI在跑算法 |
 活跃会员
活跃会员
 老版主限定
老版主限定



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







