|
8039| 1
|
[知识星球] 可爱招财猫 |
|
本帖最后由 粒子 于 2018-6-29 18:35 编辑 可爱招财猫 一、蜀星的故事 蜀星和妹妹在饭店吃饭看到前台有一个很可爱的招财猫, 妹妹非常喜欢,回到家后仍对招财猫恋恋不忘。 蜀星决定做一个招财猫作为六一儿童节的礼物送给妹妹,满足她的小心愿。 二、任务说明: 任务目标:制作一个招财猫。能使用运动传感器、舵机,知道其工作原理;学习基础编程。 三、知识导航 1.数字输入运动传感器  运动传感器工作原理:运动传感器全称“人体红外释热电运动传感器”。 它能检测到运动的人或动物身上发出的红外线,输出的是数字信号, 可以应用于各种需要检测人体运动的场合。 2.输出舵机 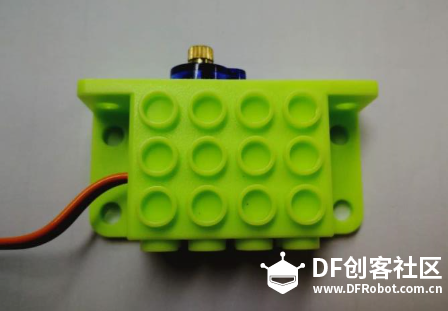 舵机工作原理:航海模爱好者经常用电机来控制模型的方向舵,所以就将其称为“舵机”。 其工作原理是把接受到的电信号转换成电动机轴上的角位移或角速度输出。 四、器材准备 硬件材料    1×移动电源 软件平台  其他材料 彩色笔1盒、雪糕棒若干、胶枪1把、铅笔1支、橡皮擦1个、双面胶1个、硬卡纸1张、剪刀1把 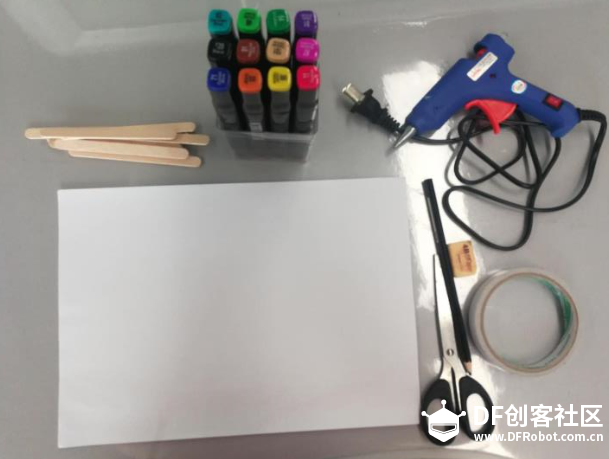 五、任务操作 操作一:制作招财猫外形 第一步:寻找参考图形 对于招财猫的外形,可上网搜索图片,选择喜欢的图片作为参考。 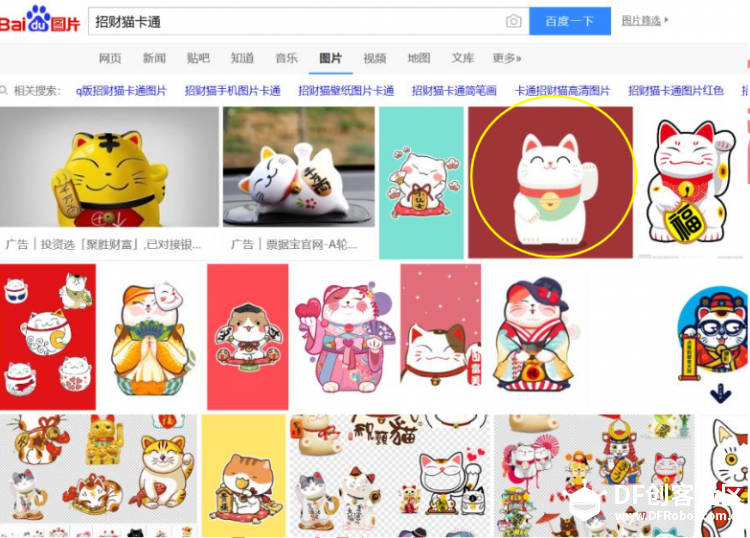 第二步:绘画并裁剪 裁剪的时候要把小猫招手的手臂进行单独的裁剪,因为后面会用它进行招手,灵活的摆动。  第三步:搭建框架 在这里我是用雪糕棒作为支架,用热熔胶连接支架。 做支架的时候要留出摆放主控板和扩展版以及传感器的空间。 热熔胶的温度很高,使用的时候一定要注意安全,防止被烫伤。 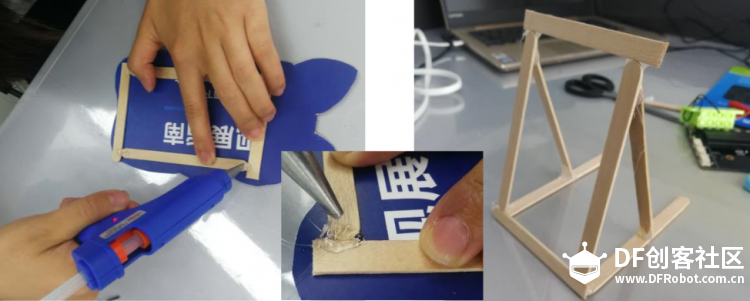 第四步:外形和框架结合 用双面胶把裁剪好的小猫粘贴在雪糕棒上,一个可爱的招财猫造型就做好了。   操作二:招财猫工作整体流程 1.实现功能 当在Mind+编写程序后,烧录至micro:bit小板子,运动传感器检测到红外线输出数字信号,舵机接收信号并进行工作。  2.硬件连接 我们需要连接以下部分:micro:bit主控板与micro:bit扩展板连接; 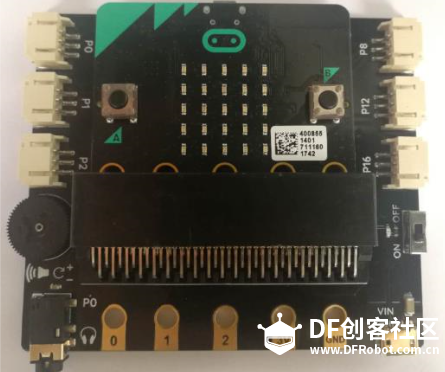 运动传感器连接到扩展版的P0接口,舵机连接到P8接口; 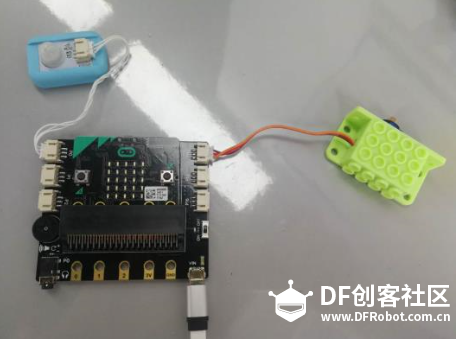 3.编写程序 ◆双击图标进入软件界面,新建项目,点击左下角“扩展”: 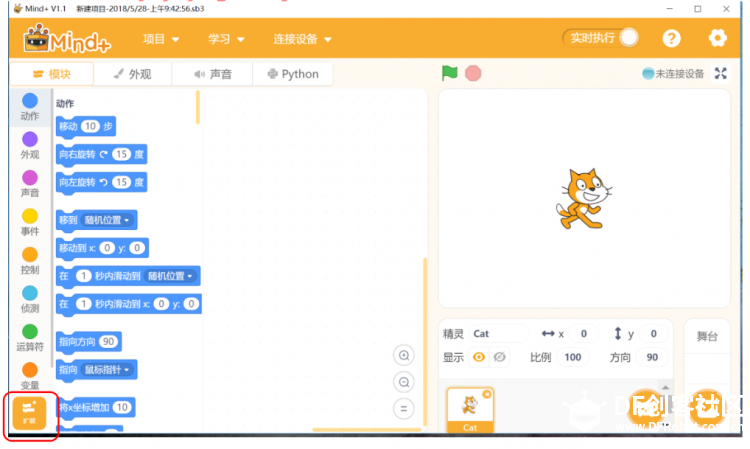 ◆进入选择界面,选择“主控板”下面的“micro:bit”: 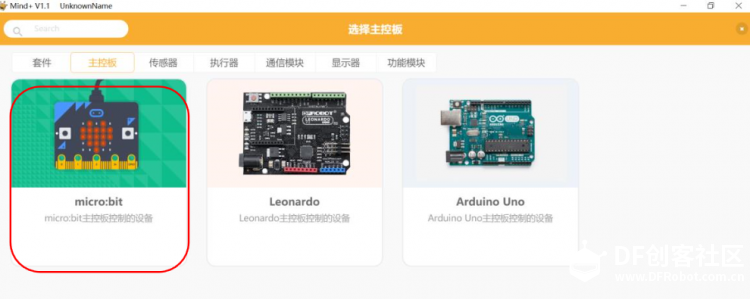 ◆进入编程界面,把“实时执行”切换成“上传执行”: 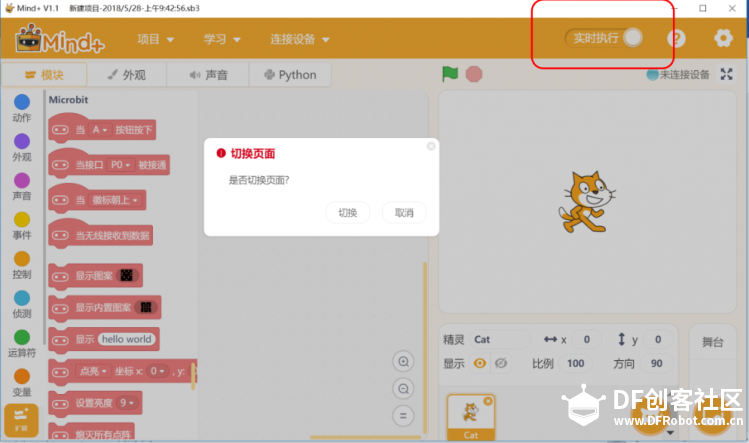 ◆再次进入扩展界面,添加执行器中的舵机模块:  舵机模块添加成功: 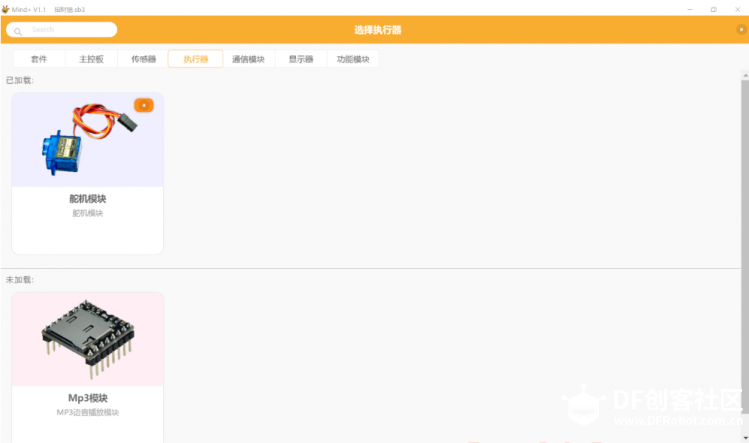 ➢特别提醒:一定要先进入【上传执行】模式的编程界面才能选择舵机模块, 如果是实时执行的编程界面是没有舵机这个选项的。 ◆进入最终的编程界面: 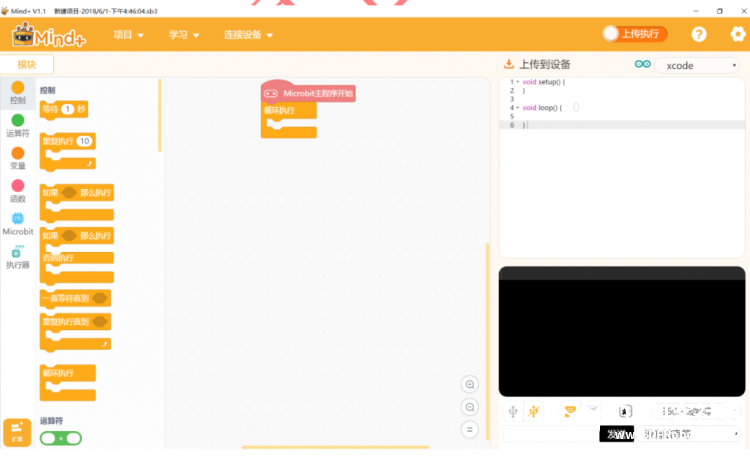 ◆具体编程步骤: 第一步,把运动传感器模块的数字引脚设定为P0: 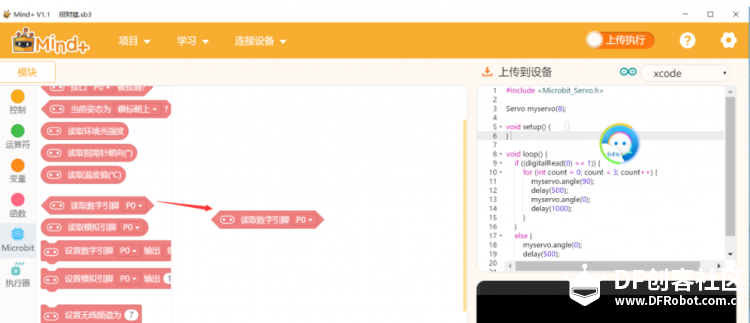 第二步,如果检测到红外线,数字引脚P0的值等于1,选择运算符:  第三步,添加执行器,设置舵机的数字引脚为P8, 如果运动传感器没检测到红外线,舵机保持0°:  第四步,如果运动传感器检测到红外线,舵机进行0°--90°--0°运动; 没有人时,小猫的手在是举起的,我们可以设置舵机的角度为0°; 当有人时,小猫的手是上下运动的,我们根据观察可以设置舵机的角度先为90°,再设置0°, 如果想让小猫的手多运动几次,那就添加重复执行几次。  ➢值得注意的是,舵机的转动需要时间, 因此,程序中时间的变化不能太快,不然舵机跟不上程序。 根据需要,选择合适的延时,反复调试,可以让舵机很流畅的运动。 那么完整的程序就是:  上传程序并测试 第一步:使用USB数据线将主板与电脑连接起来。 第二步:上传程序。 需要注意的是,使用舵机模块进行的编程,需要另外接入电源, 如果没有接入其他电源,我们会看到无法连接设备, 当接入其他电源后,就能连接设备COM5-Microbit, 然后点击上传到设备。  第三步,上传成功提示: 最后进行造型的搭建,把小猫外形和主控板、传感器等进行拼装, 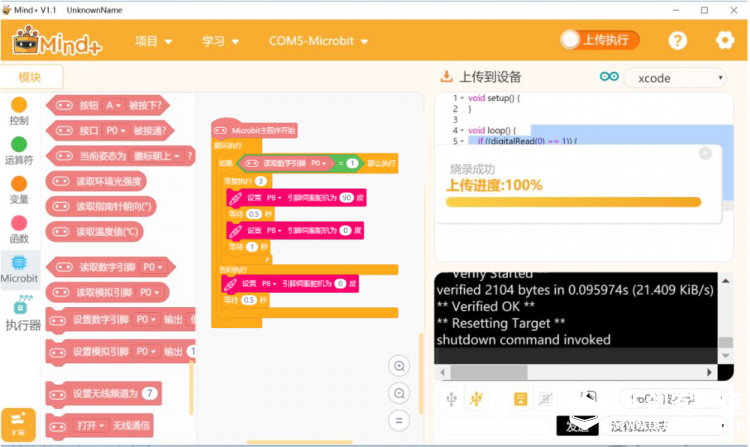 最终结果显示如下:  结果展示    文章来源:蜀星星创客星球—— 小凤^酱 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






