|
19963| 0
|
[知识星球] 说话机器人 |
|
本帖最后由 粒子 于 2018-6-28 19:12 编辑 说话机器人 任务目标: 制作一个智能的会说话的机器人, 能够准确的报道光线强度,温度,指南针朝向角度。 器材准备 Micro:bit主控板  USB数据线  软件平台 我们这里使用的软件是mind+  活动过程 制作思路:当按下micro:bit的按键A时,机器人说出当前环境的光线强度,并且点阵模块显示出光线强度; 当按下micro:bit的按键B时,机器人说出指南针的朝向角度,并且点阵模块显示出指南针的指向角度; 当同时按下micro:bit的按键A和按键B时,机器人说出当前环境的温度,并且点阵模块显示出环境温度值。 制作过程 双击mind+软件,进入编辑界面,选择实时执行模式: 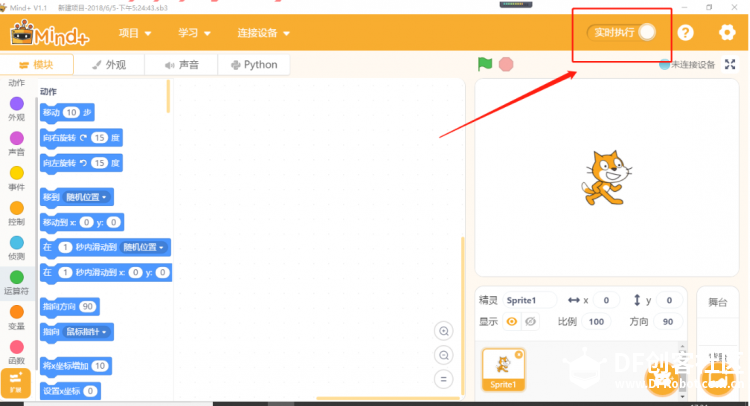 点击左下角的扩展进入选择界面:  选择“主控板”中的“micro:bit”: 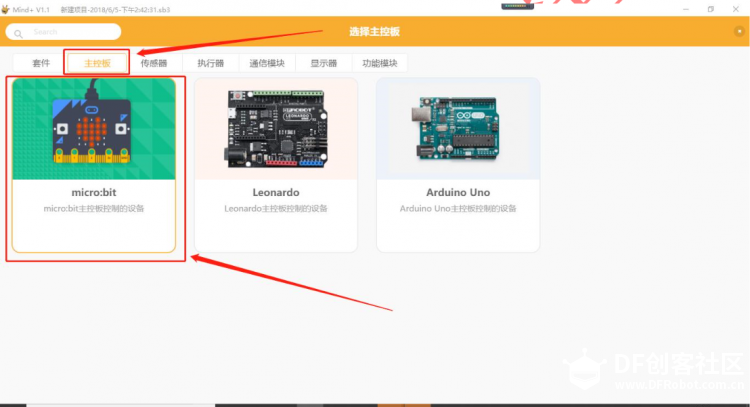 然后我们就可以看到micro:bit这个套件已经被添加进来了: 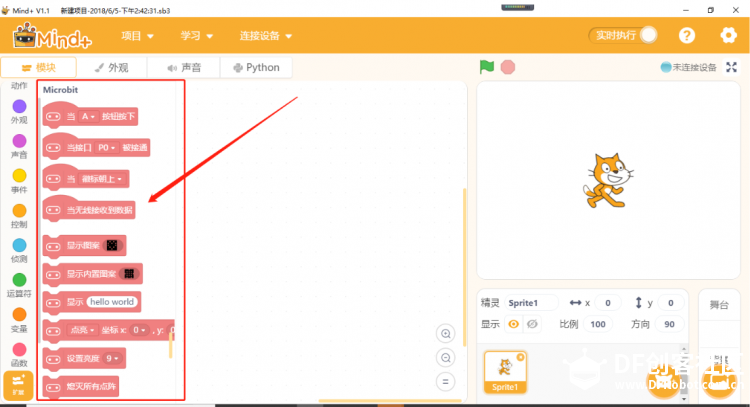 编写程序添加角色,在角色库找到“Nano”: 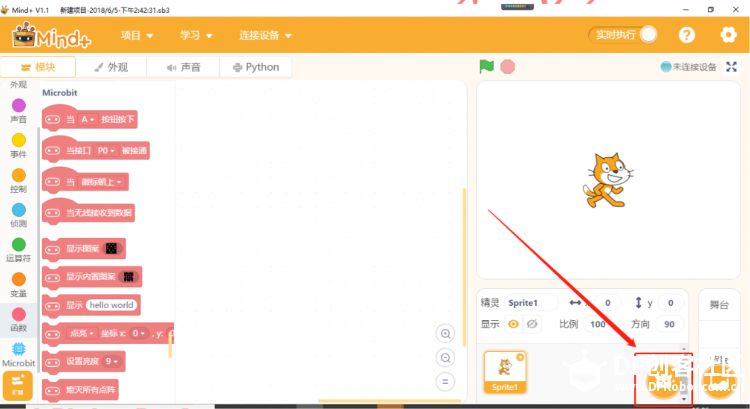 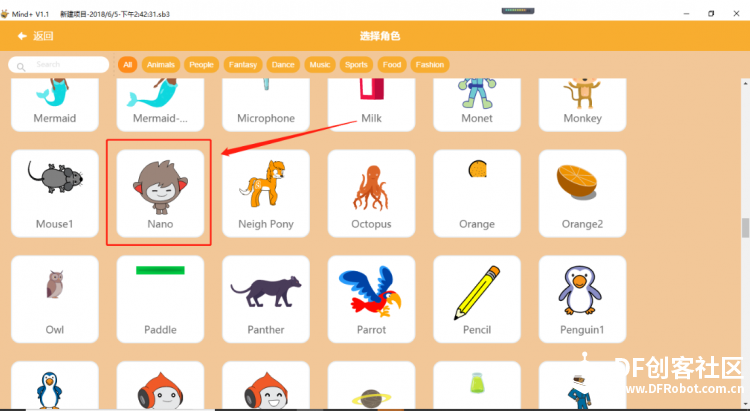 然后,我们将原来的角色“小猫”删除,点击角色小猫右上角的“x”, 然后点击“确认”就可以删除这个角色: 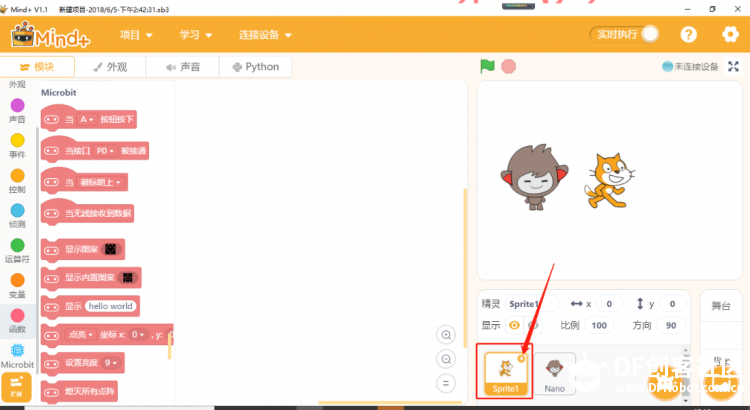 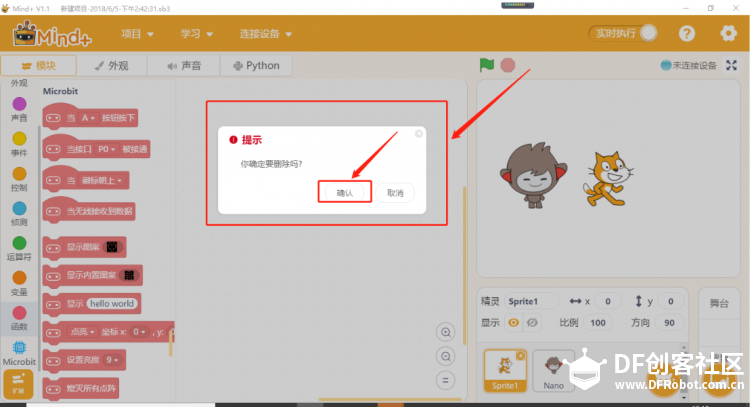 接下来我们去“背景库”选择一个背景: 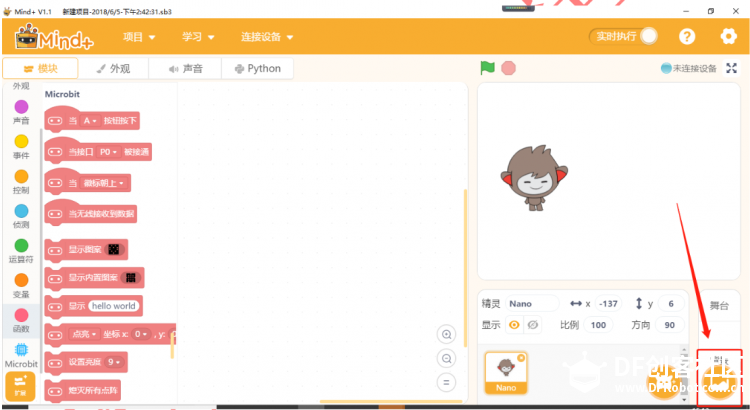 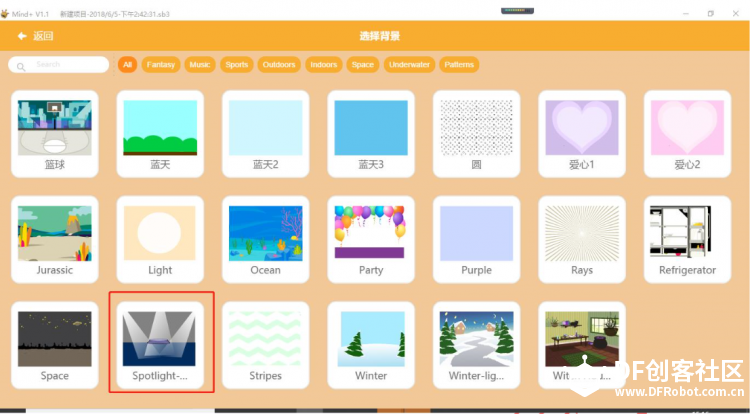 用删除角色一样的方法删除不要的背景: 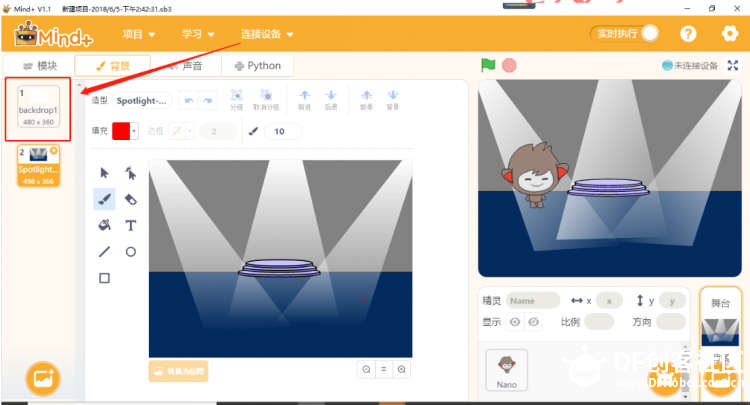 点击“模块”回到编写程序的界面,然后我们将Nano放在舞台中央: 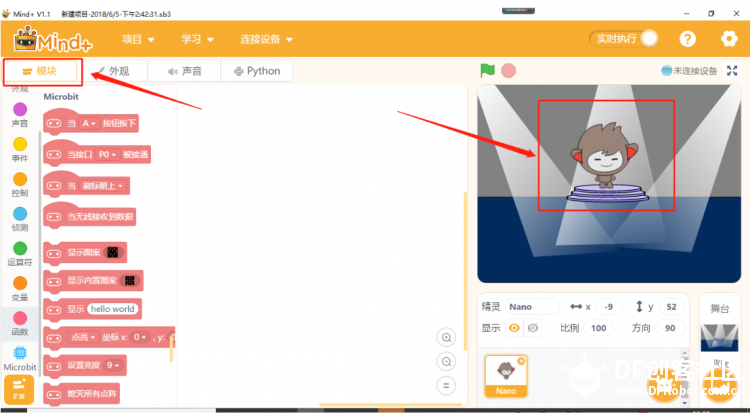 在模块中找到“microbit”,因为这个模块在最下面, 所以我们需要点击进度条往下滑动才看得到,右边对应的指令也是一样的。 这里我们将“当A按钮按下”拖到编辑框: 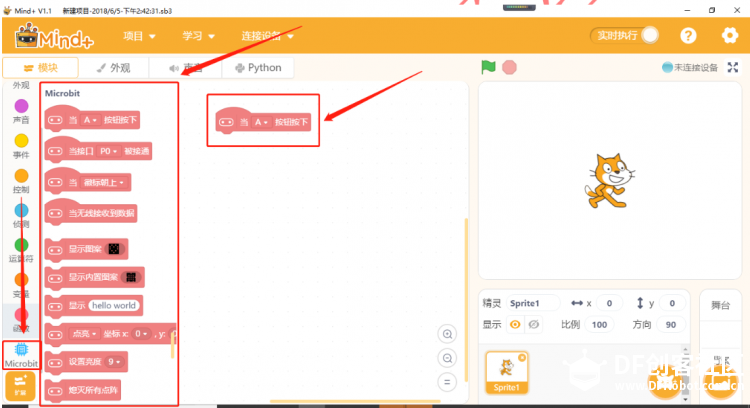 在“控制”中找到指令“循环执行”,不然程序就只会执行一次,然后拖到程序编辑区域:  在“外观”中找到指令“说”,时间可以自己修改,拖到程序编辑区域:  在“microbit”中找到指令“读取环境光线强度”,嵌入在说指令当中:  机器人说出环境光强度的代码就完成了:  下面我们让点阵模块显示出环境光强度的值: 为了让机器人说和点阵显示是同时执行的,我们也是在按键A被按下时就开始显示, 并且等待时间和机器人说的时间一致: 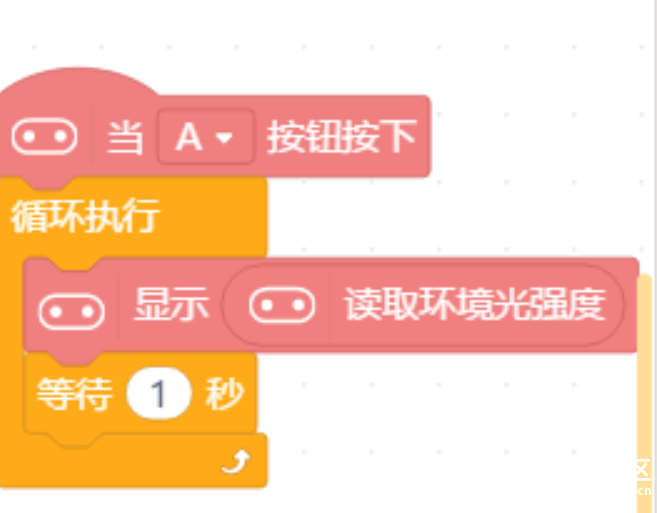 这两个程序一起执行就可以达到: 当按键A被按下时,机器人报道当前环境的光强度大小,并且点阵模块也显示出光强的值。 让机器人报道指南针的朝向角度也是一样的操作,在“microbit”中找到“读取指南针朝向”:  然后也是同时让机器人和点阵同时报道: 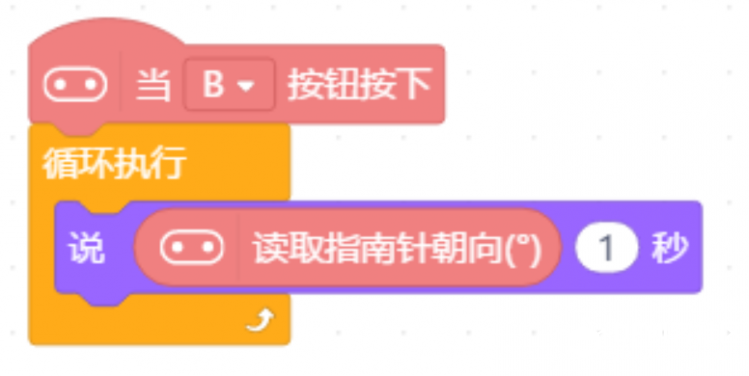  这里我们是按下按键B报道指南针朝向,点击倒三角可以对按键进行选择: 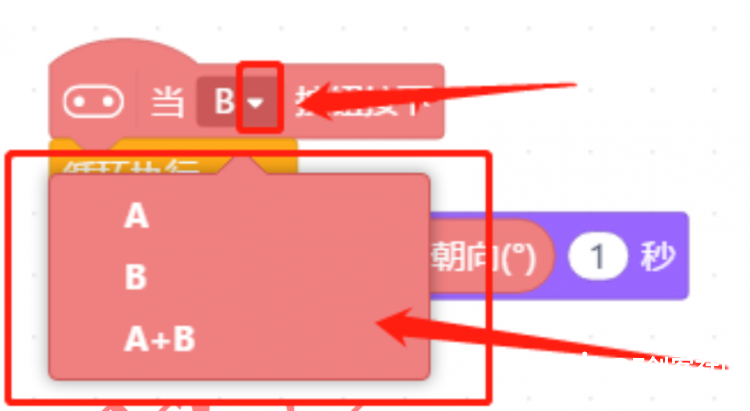 同样,在“microbit”中找到“读取温度的值”:  然后按下按键A和按键B时,机器人就报道温度的值,点阵就显示出温度的值: 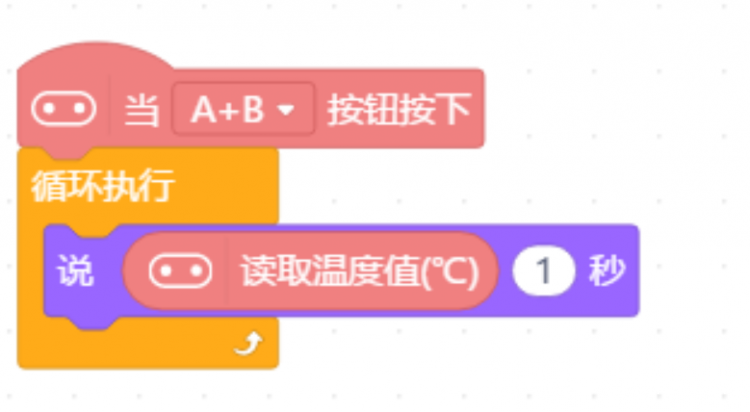 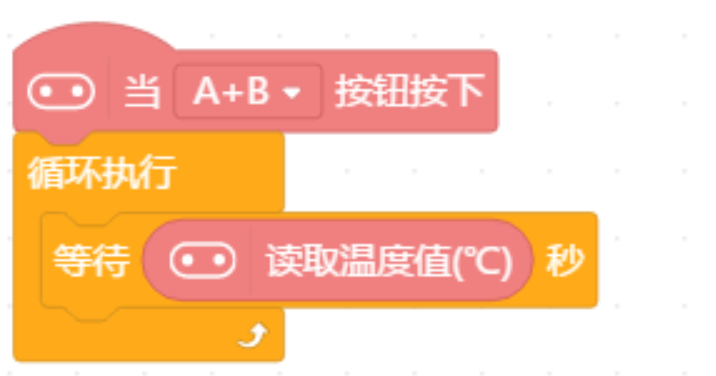 这样我们的程序就编写完成了。 上传程序,观察结果 使用USB数据线连接micro:bit和电脑:   连接micro:bit设备,确认连接成功:  点击绿旗,运行程序:按键A被按下时: 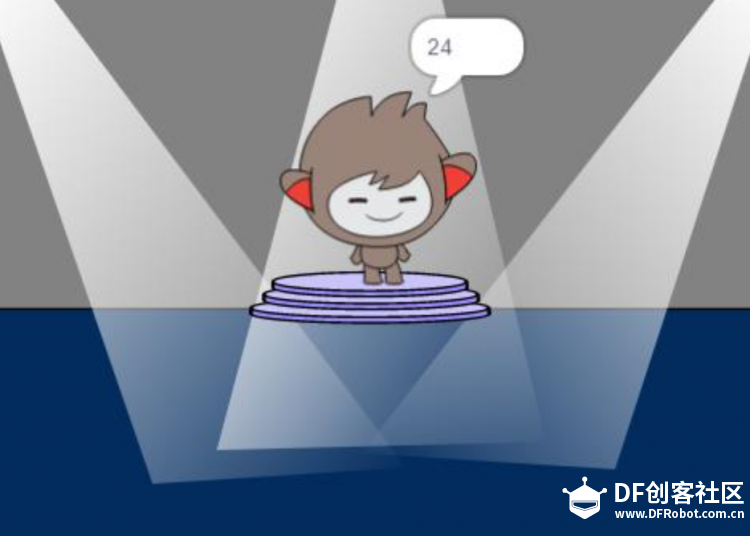 按键B被按下时:  按键A和按键B被按下时:  |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






