|
8425| 0
|
32路舵机控制板与多自由度机械臂 |
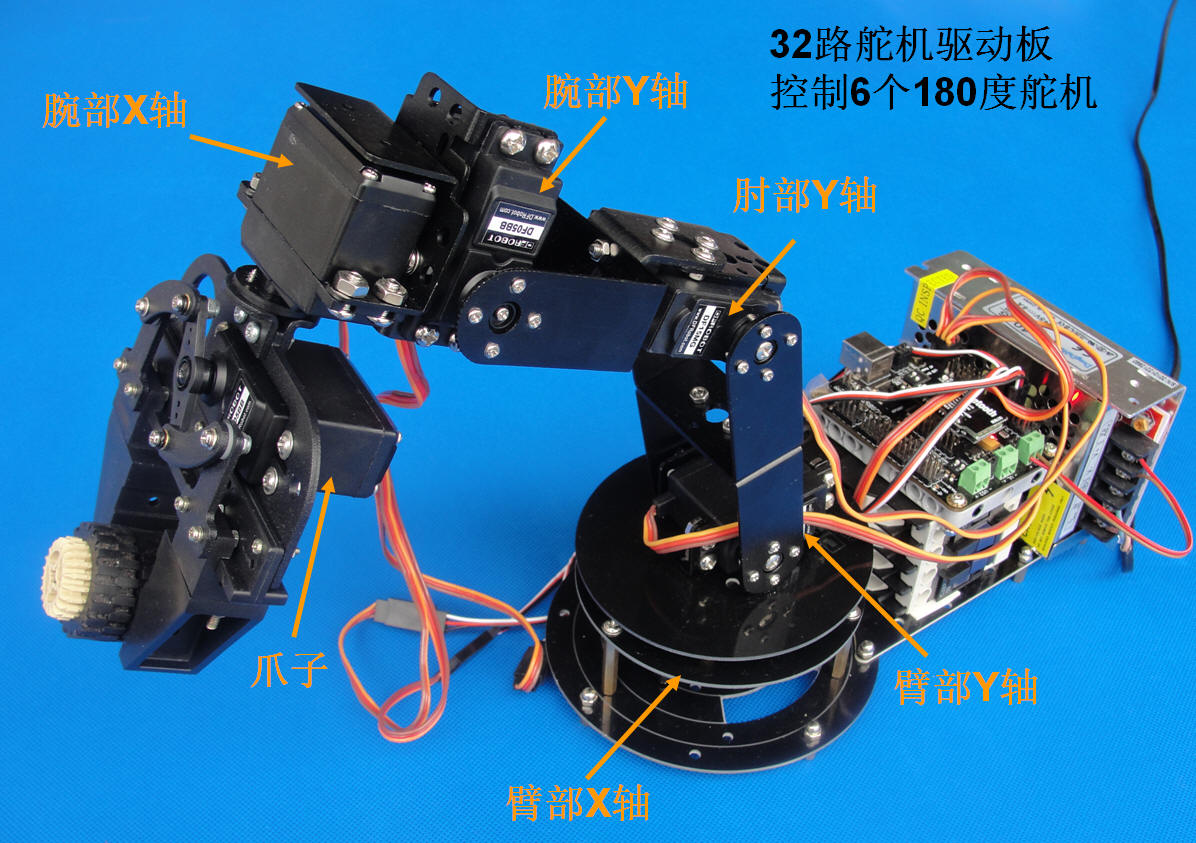 工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。 工业机器人还可以接受示教而完成各种简单的重复动作,示教过程中,机械手可依次通过工作任务的各个位置,这些位置序列全部记录在存储器内,任务的执行过程中,机器人的各个关节在伺服驱动下依次再现上述位置,故这种机器人的主要技术功能被称为“可编程”和“示教再现”。 这篇文章介绍用DFRobot公司出品的USBSSC32舵机控制板来控制的6自由度机械臂,就是通过“可编程”和“示教再现”技术来实现的。我这个机械臂可以算是工业机器人的原型产品,就用成本低廉的180度舵机、舵机连接器和舵机控制板构建而成,通过它也可以让我们体验到工业机器人的魅力。 视频: 全文见博客网址:http://www.eefocus.com/zhang700309/blog/12-09/286479_a1c80.html. |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






