|
43441| 25
|
[项目] 实时水质监测船 |

|
设计来源: 在无线电杂志2016年第10期,我们制作了简单水质水位监测装置。此装置虽然实现了对水质水位的监测检验,但是只是局限于本地监测显示,并且需要人工记录。不能够对于室外的池塘水质指标实现实时监测。于是我们决定通过改造遥控船,使其变成一艘水质监测船。通过原本遥控装置控制遥控船驶入采集样本的水域,而船体携带的相关传感器,可以将水质的相关指标,以无线数传方式发送到遥控端。同时,采集数据也保存到本地TF卡中,方便进行水质数据分析。   项目设备: 1 遥控船 1 2 Arduino Uno 2 3 IO 拓展板V7 5 APC220 6 SEN0169 模拟pH计(专业版) 1 7 SEN0165 模拟ORP计 氧化还原电位计 Arduino兼容 1 制作过程: 采集端: 对于本次制作,我们是在玩具遥控船的基础上进行改造。为了简化系统,我们将动力系统和检测数据系统分开。在保持原有遥控船动力系统的基础上,另外加载温度、PH值、氧化率等水质指标传感器,在电气上做到了与动力系统隔离。数据遥控及客户显示端,我们则是共用了原本遥控器供电。  图3 采集端实际上就是与船体相对独立的一个控制系统,通过Arduino Uno主控+W5100拓展板+IO传感器拓展板V7,配合PH、ORP、TEMP传感器采集水质数据保存在TF卡上,再通过APC220传输到遥控端。PH接A2,ORP接A1,TEMP接D2,APC220对应接入IO拓展板APC接口。采集电路如下图所示 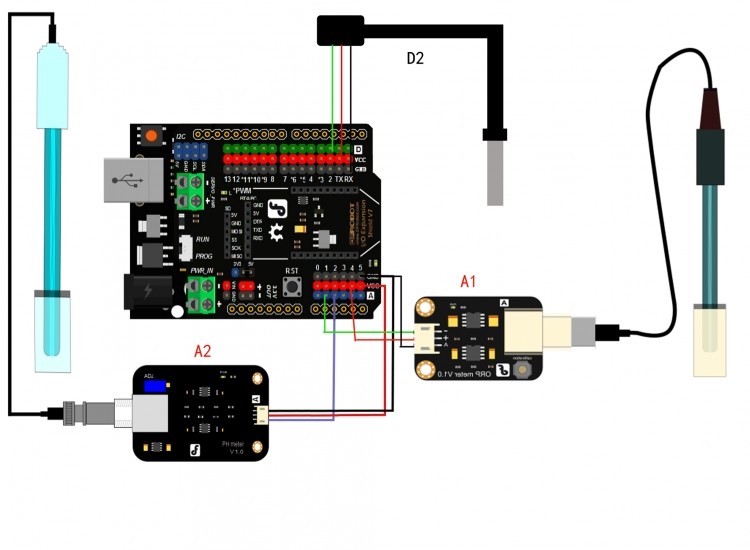 图4 遥控端: 遥控端的主要功能为:遥控船体运动和接收采集的水质数据。这里我们将接收数据的显示端和遥控器共用一路电源。为此先要对原来的遥控器改造,重新引出一路电,作为接收数据显示端的供电。 拆开遥控器后盖  图5 在遥控器后盖板上方钻出一个孔位用于安装接收数据显示端的供电开关。  图6 从电池盒分别引出两根线,红正、黑负用于给数据接收显示端供电。 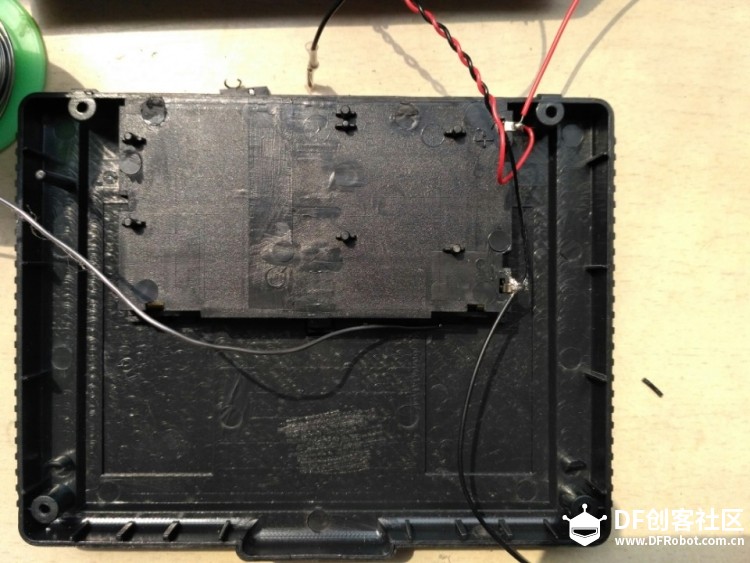 图7 将引出的两根线分别接在拨码开关和电源转接头上。 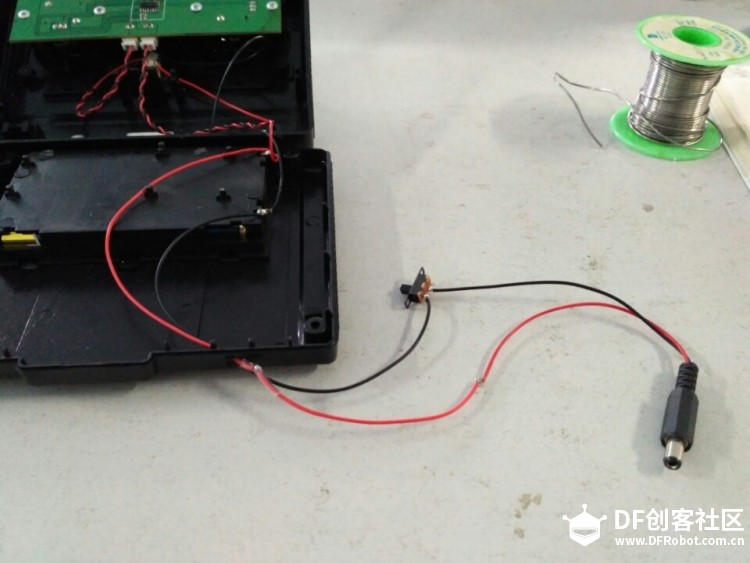 图8 再将遥控器部分原样装回。接收数据显示端,将LCD Keypad Shield按键扩展板叠加在Arduino Uno上,在APC插口上叠加APC220数传模块,即完成接收端的电路。 数传配置: 1 将天线旋紧在 APC220上,将其插在 USB转串口上,最后再插到你的电脑上。如图9所示。  图9 2.下载并安装 USB转串口的驱动。附件CP210x_Windows_Drivers为相应驱动程序。 3.打开设备管理器,找到您的USB转串口的串口号,这里是 COM8。 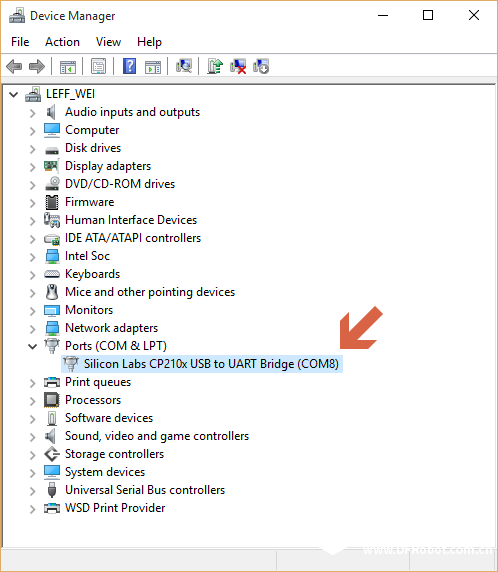 图10 4.打开应用程序APC22X_V12A.exe(即:RF-magic)进行相应配置。 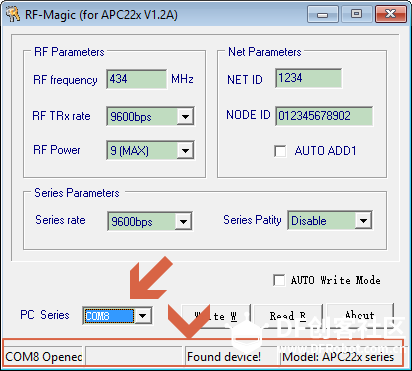 图11 注意:打开软件后,软件将自动打开串口,并有提示。如果提示打开串口失败,请用管理员身份打开或者从设备管理器中将默认的串口号改为较小的串口号,如:“COM1”。 5.按照下图中红色标注里的参数配置(默认值),点击 写入Write W。 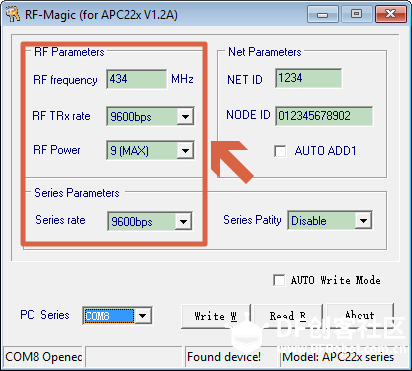 图12 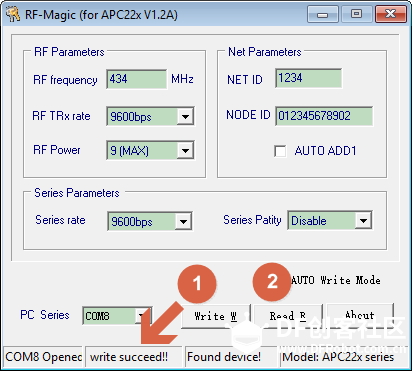 图13 6.对另外一块APC220进行相同的配置。 7.通讯测试:将一块插在电脑上,另一块插到 Arduino上。 用Arduino串口监视窗或串口助手打开COM8,您将看到“Hello!” 每隔一秒打印在电脑的窗口上如图14。 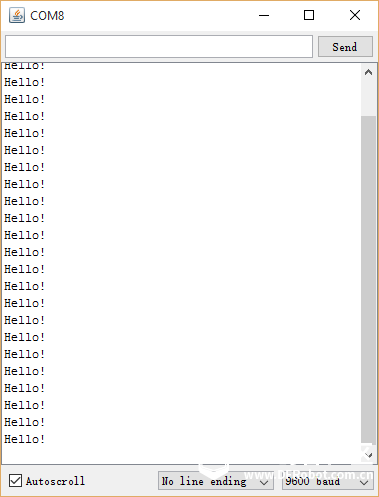 图14 代码见附件: 安装测试: 由于是对遥控船的改造,所以我们将数据采集控制部分放在船体内部。同时为了保证电气部分的防水性,建议把其放在防水的盒子里。而对于船体的传感器,通过船体的的孔位穿出,固定于左右船舷上。如图15、16所示  图16 将船下水,驶入指定水域采集相应水质指标。  图17 遥控接收端即可实时接收采集端发来的数据。  如图18 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






