|
47190| 28
|
[进阶] 兼容Arduino 的摇摆企鹅机器人制作 |

热腾腾的夏天到了,如此勤奋的我怎么能只去啃啃冰棍呢,希望能设计一个小物件有趣的东西,送给木讷的我,至少也得呆萌。企鹅说,偶,偶可以帮到你么...... 企鹅步是它很重要的一个呆萌神功,所以我在设计的过程中着重实现这个动作。当然了,它的样子也会让一些人儿内心融化的。 在制作过程中我有了一个惊喜的发现,机器人摇头的时候,舵机运动和木质部分的摩擦会发出”jiji…...jiji”的声音,像是企鹅语,省了很多功夫呀。在选择主板上,最开始,我选择了常规的ArduinoUNO主板,后来在制作的过程中,发现ArduinoUNO主板体积似乎太大了些,UNO本身又不带电机驱动芯片,我难道还要另外买一个电机驱动扩展板么?!价格挺高,硬件连接也麻烦。后来,我找到了DFRobot公司的一个叫ROMEO BLE mini的主板,完全兼容ArduinoUNO的同时还带了电机驱动芯片!体积也足够袖珍,直接选择了ROMEO BLE mini作为整机的核心主板! 来看看我做得怎么样? *机器人3D设计图纸(下载链接) *激光切割用CAD文件(下载链接) 制作过程 1、拆取木质部件 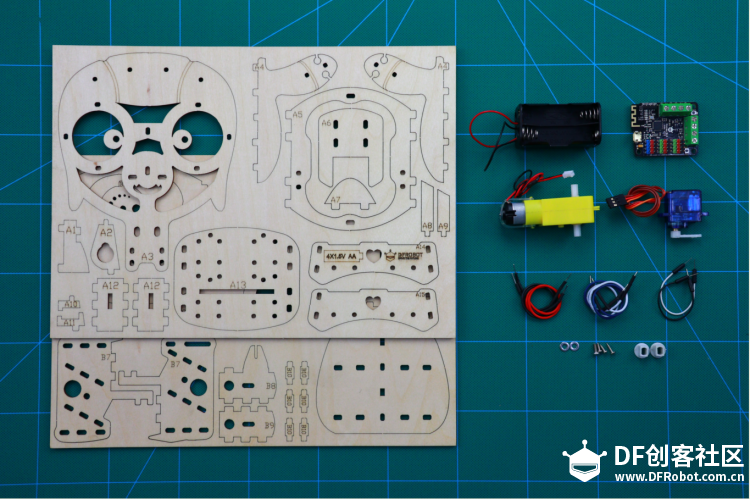 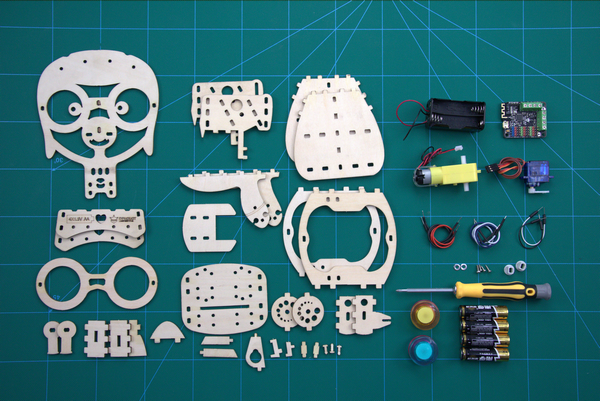 2、搭建企鹅机器人的动力部分 固定好直流电机 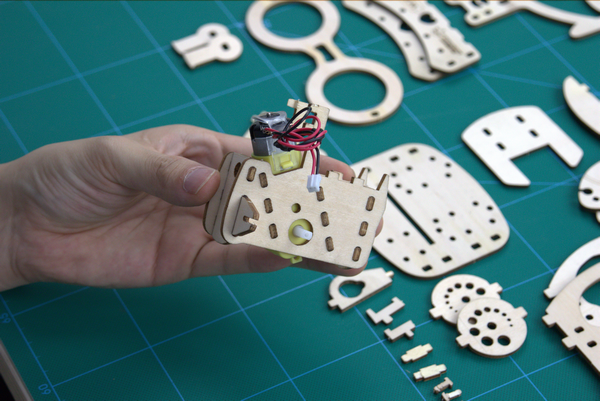 安装3d打印电机轴固件  电机双轴上固定的企鹅“脚丫”呈180°   3、运动方向控制部分   安好旋臂的舵机固定在舵机支架上  连接舵机和直流电机支架 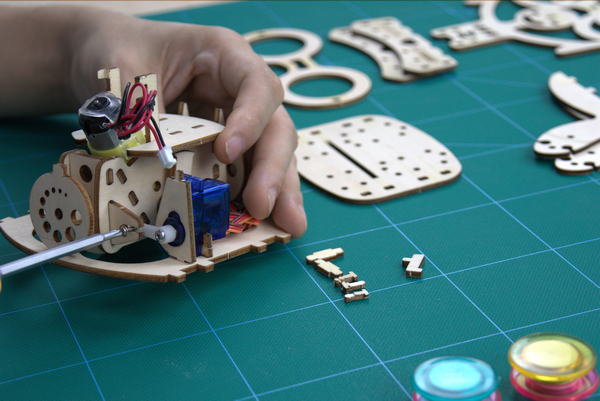 4、整体结构组装  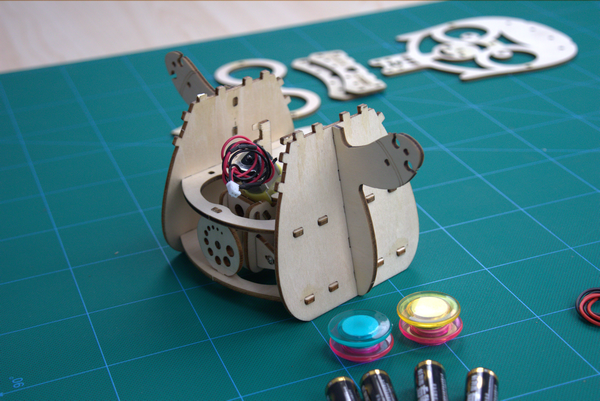 将企鹅的头部固定在预置的卡扣中   置入放好电池的电池盒,整理一下线头 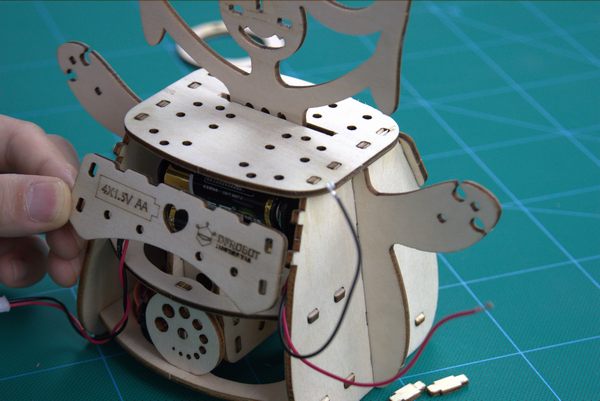 5、最后的形态 再添入两枚彩色的双眼 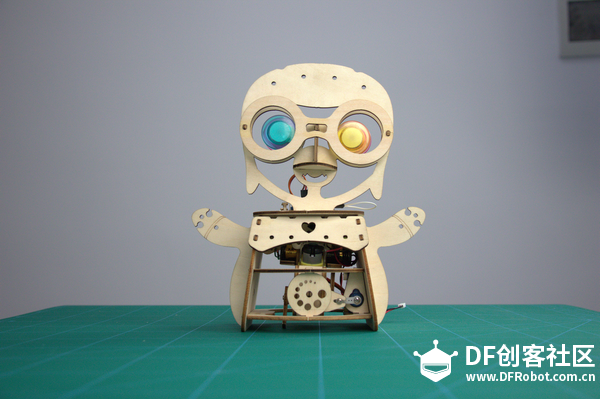 6、电路连线  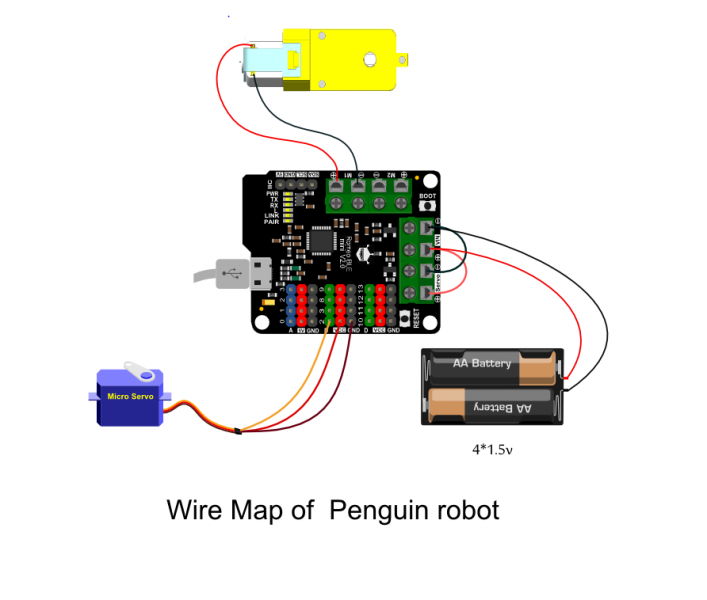 附程序: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 编辑选择奖
编辑选择奖






