|
14399| 12
|
用小小的滚轮,丈量你周围的“天下” |
|
本帖最后由 川山甲的壳 于 2017-8-21 13:54 编辑 Arduino UNO——小型测距轮 现在打开百度地图,输入起点和终点,两地之间的距离马上显示在手机屏幕上。相比以往的地图,现在的电子地图,地理信息量更大。距离计算的更加精确。可这么大的面积,是怎么测量出来的呢?卫星、卷尺还是其他的。卫星能勘探地形、地面资源。但所测距离的精确度不高;卷尺灵活性不够,所测的距离不够长。排除以上两种还有其他测距工具吗?前段时间在马路上看见有人手持一个滚轮沿着马路边滚动,觉得很是新奇,上前询问,原来他是地图工作者,现在正在绘制路线,并测量两地之间的距离。原来他所用的就是用测距轮。这种测距工具,方便携带,灵活性高,测量精准度高。回来之后自己也制作了一个小型的测距轮。  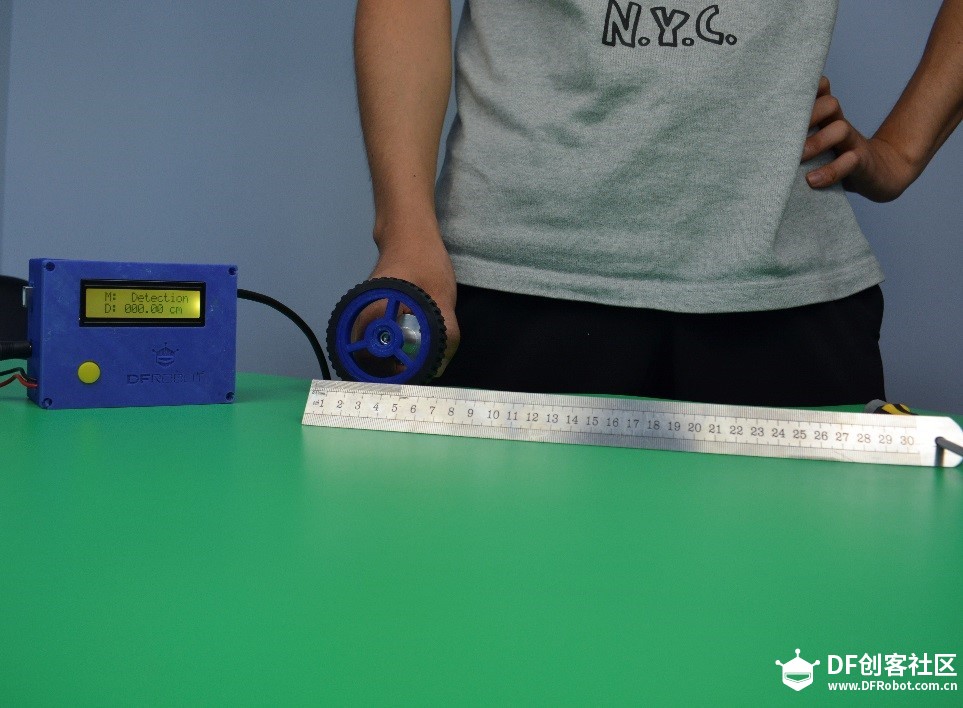  测距轮相比传统的卷尺,可以随意滑动,可测正负(向左滑动为正,向右滑动负)。 下面就来看看做的怎么样吧。  【配件图】  【主要配件】 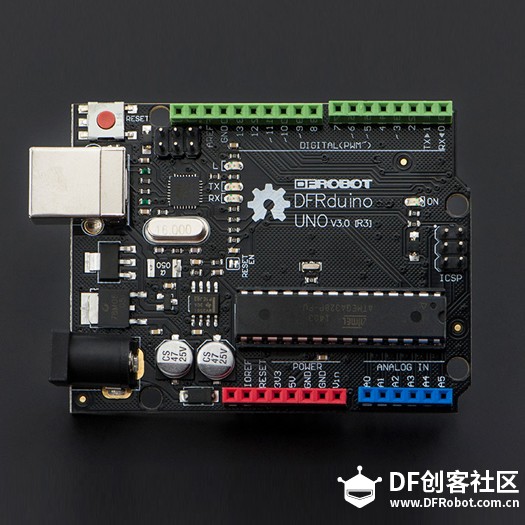 测距轮的主板我采用的DFRobot最新推出的DFRduino UNO R3的主板,他完全兼容Arduino UNO R3版本。性价比也比较高,相比之下,我更钟意DFRduino UNOR3。因为它采用沉金工艺,外观精致,在追求质量的同时,也提高了颜值 。制作测距尺,还需要一个强大的配件,那就是编码器,这样才能计数。  在这里我采用增量式光电旋转编码器,它能有效的兼容Arduino,PLC等各类主控器。它具有AB两相输出,可以通过旋转的光栅盘和光耦产生可识别方向的计数脉冲信号。其电路输出的类型为NPN集电极开路输出,这样的输出类型可以和内部带上拉电阻的单片机连接,然后实现转速、角度、角速度等数据的测量。 注意:编码器在不接设备的情况下,集电极开路输出,在没有上拉电阻的时候,是没有电压输出的,如要要示波器示波请在AB两相输出上加上两个上拉电阻。如果实际运用,就不需要加上拉电阻了。 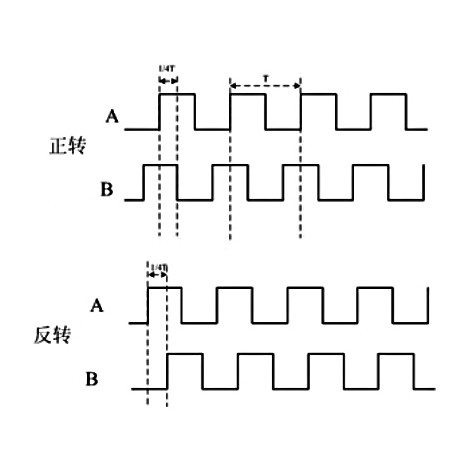 示波器信号 【部分配件】 【电路接线图】 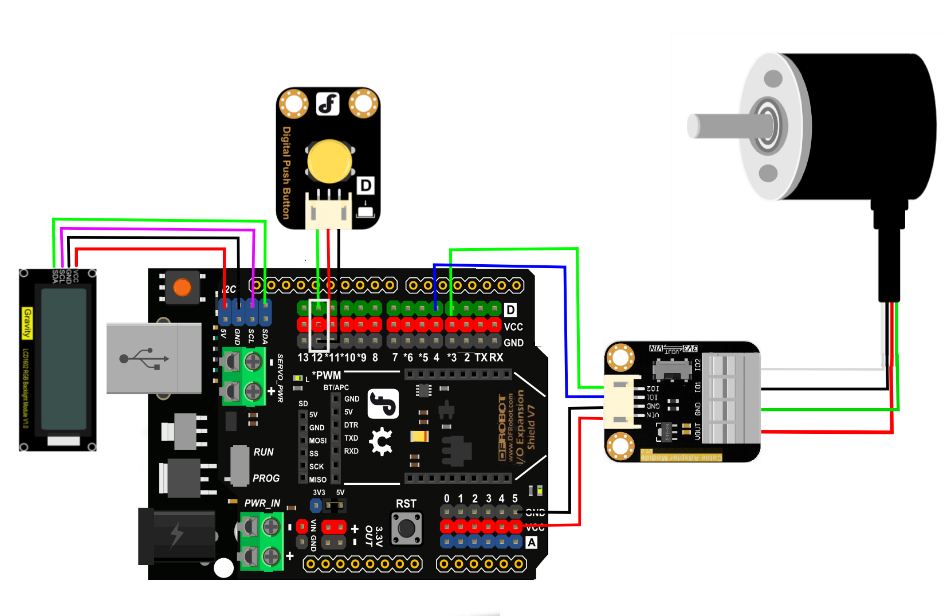 实物连接图 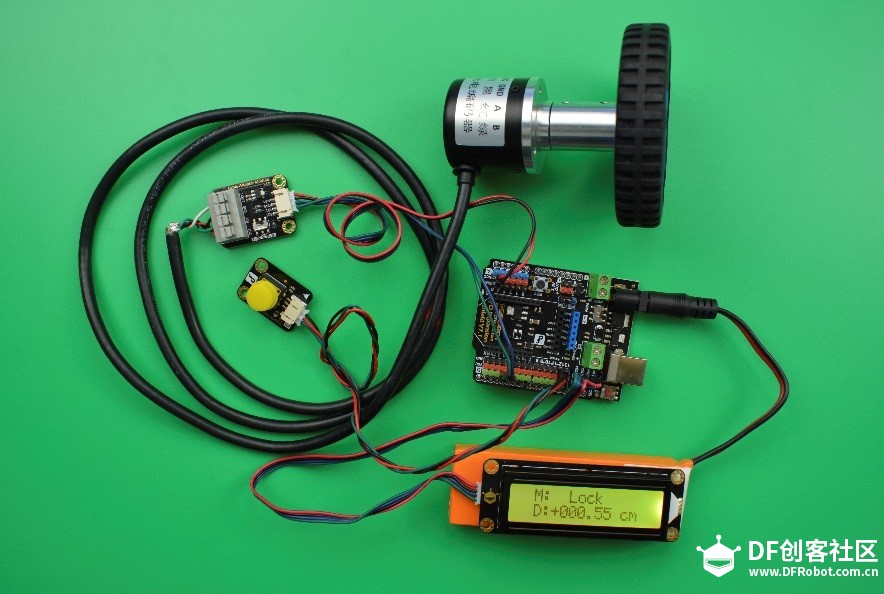 【效果图】 Reset:此模式为复位模式,切换到此模式,可以清零所测的数据。这样又可以重新开始测距取值了。  Detection:此模式为测距模式,切换到此模式,可以开始你的表演了,随意测距,上下左右随便滚动,完全无压力。往左滚测得是数值为正,往右滑数值为负(当测距数值为正得时候,往右滑可以看见数值随着减小)。  Lock:此模式为锁定,当你测得一定的距离后,选择到此模式可以锁定数据,随意你怎么滚动,数据都不会改变了,这样你就可以记录数据了。方便吧,按三下按键就可以了哦。  为了让携带方便,外观漂亮。我用3D打印机打印了外壳。方方正正的,是不是看起来有点呆板。没办法,我能想到的只是如此了。相信朋友们肯定有更好的创意。3D打印的文件我以附件的形式放在文末了。 注意:因为自己找的轮毂尺寸都不合适,后面自己用3D打印机制作了一个80mm的轮毂。而轮胎还是用的高品质环保ABS硅胶车轮外的轮胎   程序: [mw_shl_code=cpp,true]#include <Wire.h> #include "DFRobot_RGBLCD.h" DFRobot_RGBLCD lcd(16, 2); //rgb_lcd lcd; #define A 3 #define B 4 #define Key 12//key #define D 79 //Diameter 79mm float C = 0; //perimeter unsigned int Distance; int VA = 0; int VB = 0; unsigned long Count = 0;//count unsigned int Count_1 = 0; //Negative count unsigned char flag = 1, Mark = 0; unsigned long lasttime = 0, Modetime = 0; //Length measurement range is ± 6 M void setup() { Serial.begin(9600); lcd.init(); lcd.setRGB(255, 255,0); lcd.setCursor(2, 0 ); lcd.print("M:"); lcd.setCursor(2, 1 ); lcd.print("D:"); lcd.setCursor(12, 1 ); lcd.print("cm"); pinMode(A, INPUT_PULLUP); //Pull-up input pinMode(B, INPUT_PULLUP); pinMode(Key, INPUT); attachInterrupt(1, interrupt, RISING); C = D * PI; } void loop() { if (millis() - 150 > lasttime)//Detect keys once every 150ms { if (digitalRead(Key) == HIGH) if (digitalRead(Key) == HIGH) Mark += 1; if (Mark > 2) Mark = 0; while (digitalRead(Key) == HIGH); lasttime = millis(); } if (millis() - 100 > Modetime)//Refresh the data every 100ms { if (Mark == 0) //Cleared { lcd.setCursor(6, 0 ); lcd.print("Reset "); Distance = C * Count / 40; flag = 3; lcd.setCursor(11, 0 ); lcd.print(" "); } if (Mark == 1) //Calculate the measured value { lcd.setCursor(6, 0 ); lcd.print("Detection");// lcd.setCursor(4, 1 ); if (Count > 0 && Count < 0xffff)//Determine whether the length is positive { lcd.print('-');//The length is negative Distance = C * Count / 40; } else if (Count == 0 && Count_1 == 0 )//Determine whether the length is zero { lcd.setCursor(4, 1 ); lcd.print(' '); Distance = C * Count / 40; } else//Length is positive { lcd.print('+'); Distance = Count_1 * C / 40; } } else if (Mark == 2) //lock { lcd.setCursor(6, 0 ); lcd.print("Lock "); Count = 0; Count_1 = 0; } Modetime = millis(); } lcd.setCursor(5, 1 );//Displays the value of Distance lcd.print(Distance / 10000); lcd.print((Distance / 1000) % 10); lcd.print((Distance / 100) % 10); lcd.print('.'); lcd.print((Distance / 10) % 10); lcd.print(Distance % 10); } void interrupt()//Interrupt handler { VB = digitalRead(B); if (Mark == 1)//Detects whether the current mode is a measurement { if (VB == 1)//To determine whether the positive measurement { flag = 1; if (Count > 0xffff) { Count_1 -= 1; } Count += 1; } else//Reverse measurement { flag = 0; Count -= 1; if (Count > 0xFFFF) { Count_1 += 1; } } //Count is cleared over the range if (Count < 0xFFFF && Count > 0x294A) Count = 0; else if (Count < 0xFFFFD6B5 && Count > 0xFFFF) Count = 0; } }[/mw_shl_code] |

327.89 KB, 下载次数: 5620
本帖最后由 川山甲的壳 于 2017-8-21 16:47 编辑 玛斯唐 发表于 2017-8-19 19:18 在测量长度的问题上,可以将“unsigned int Distance;”修改成“unsigned long Distance;”;“if (Count < 0xFFFF && Count > 0x294A)”修改成“if (Count < 0xFFFF && Count > 0x8000)”,在lock模式,是当mark==2为锁定。函数if (Mark == 0) 这一块为清零,则清除所有的数据,重新开始测数值,也可以说是清屏。在程序中VA是没有用到。手持滚轮尺,向右为正,向左为负。VB是高电平为正。 |
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







