|
154608| 95
|
[项目] 铁熊玩创客 | 纯野生黑科技,教你自制最skr的全向麦轮小车 [复制链接]
[复制链接]
|

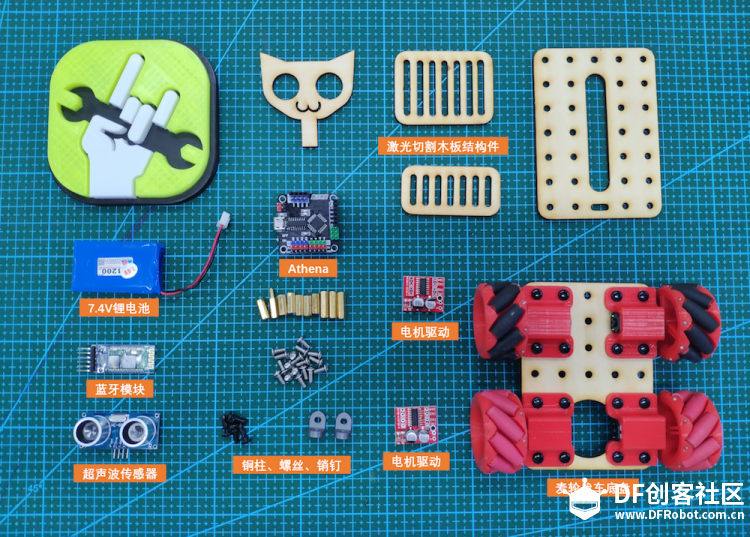
 (据说开头要吸引人,就先放张照片吧:社会我麦熊,霸气无边) 世界万物 皆有源起 一个事物没有外力的情况下 它会始终保持原状 但是当它和另一个事物相结合后 就会有一个全新的事物诞生  当奇点遇到** 便诞生了宇宙  当男人遇到女人 便诞生了宝宝 (中间环节并不是重点  当大黄鸭遇上平底锅便诞生了烧鸭(大黄鸭:我招谁惹谁了我?  当蝙蝠遇到土豪 便诞生了蝙蝠侠  当小鲜肉遇到高卡路里快餐 便诞生了肥宅  这条请自行理解,各自对号入座 …… 接下来我们来感受一个场景 当你深夜回家,在小区的转了一圈又一圈 好不容易找到一个车位,但是发现前面的车乱停 剩下的空档大小正好只能停放你的车 连一点空隙都不给你 你说咋整???  但是 眼睁睁的看着一个车位 就是停不进 是不是很不爽? 是不是很火? 是不是感到整个世界对你深深的恶意? 甚至开始怀疑人生? 于是 新的组合开始了 你有没有想过 当横行霸道的螃蟹遇到了汽车 会发生什么?  这就是神奇的麦克纳姆轮 确认过眼神,遇见对的轮 感受一波神奇的操作  麦克纳姆轮(下文简称“麦轮”)的神奇全向行动能力,一直是众多机器人的首选方案,例如RoboMaster机甲大师比赛中,各种机器人车轮便采用的就是麦克纳姆轮。  (图片来自RoboMaster官网:https://www.robomaster.com/zh-CN/resource/image) 但麦轮动戈几百的价格,让热爱它的小伙伴们望而却步。那是否麦轮就与我们普通创客爱好者没有关系、太遥远了呢?当然不是,本教程就教你自制麦轮,并用麦轮设计出一辆麦轮战车。只要你身边有3D打印机和激光切割机(可选),那么就跟我一起制作出一辆麦克纳姆轮全向小车吧! 首先来看一下麦轮战车的演示视频吧: 是不是很心动了呢?别犹豫了,拿起你的工具,准备好你的3D打印机,准备开干吧! ## 制作麦克纳姆轮 首先你要准备好如下材料和工具: 材料:
工具:
1、将麦轮模型用3D打印机打印出来,每个轮子由1个大轮与9个从动轮组成。左旋与右旋模型各打印两个,从动轮左右通用打印4×9=36个 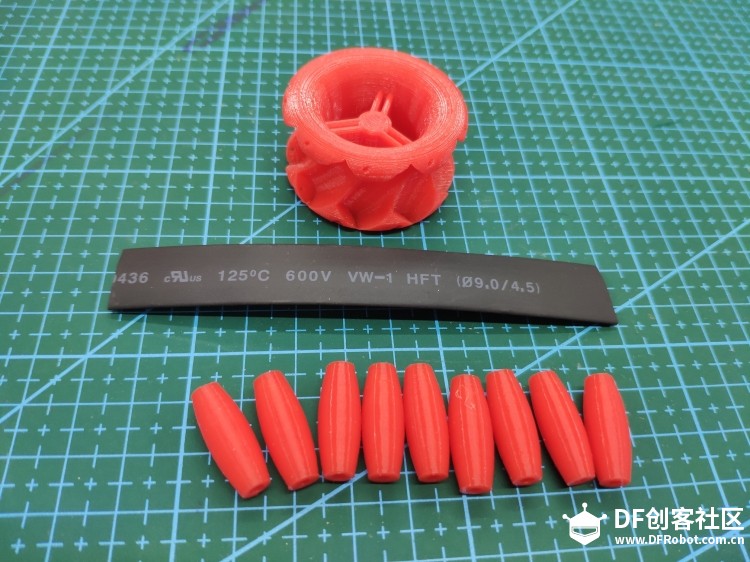 2、①将热缩管裁剪至适当长度套在小从动轮上,②用镊子夹住使用热风枪加热热缩管,使热缩管受热缩紧,③最后使用美工刀将边缘多余部分热缩管割掉。  3、用大头针穿过从动轮并固定在大轮上,确保足够顺滑即可, 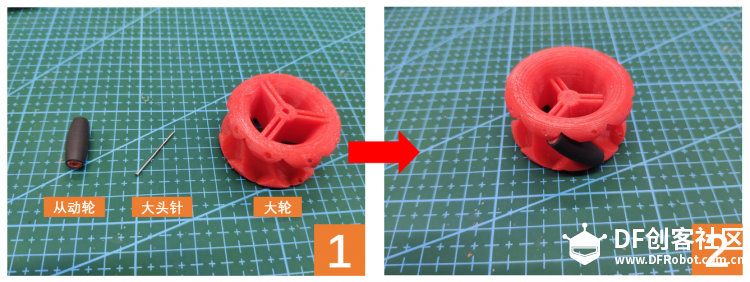 4、重复上述步骤,麦克纳姆轮就制作完成啦! 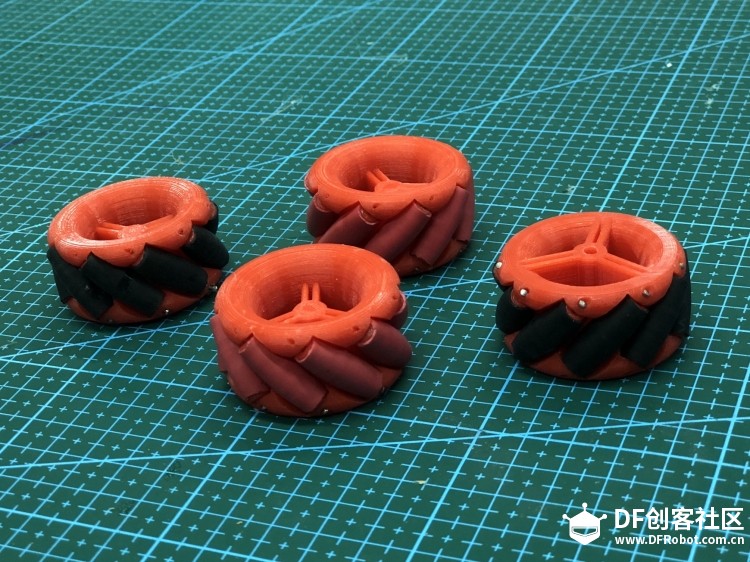 5、接下来是制作麦轮战车底盘。用塑料销钉和电机固定座将4个N20减速电机分别固定在激光切割的木板底盘上,将麦轮安装在电机轴上,如图6所示,底盘就完成啦。 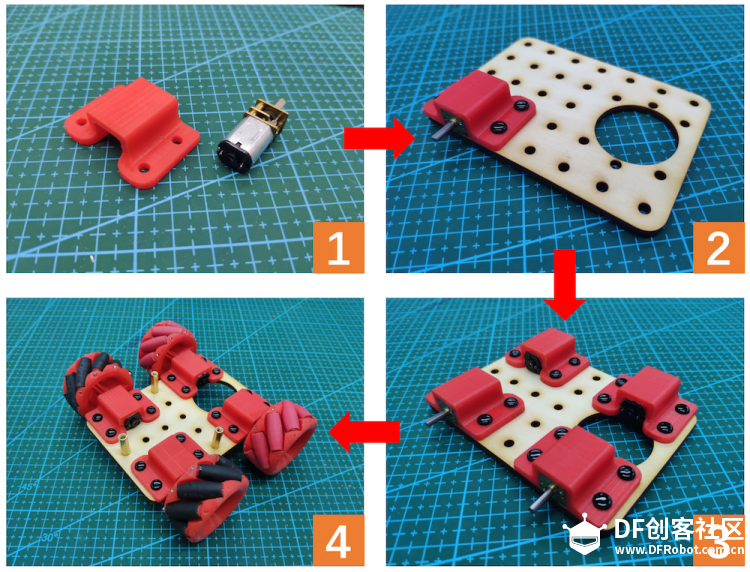 ## 制作麦克纳姆轮战车 接下来就要开始制作麦轮战车了。你要准备好如下材料和工具:
工具:
 1、首先将电机与电机驱动之间焊接好导线,并将各电机信号线以及电源线用杜邦线母头引出待用, 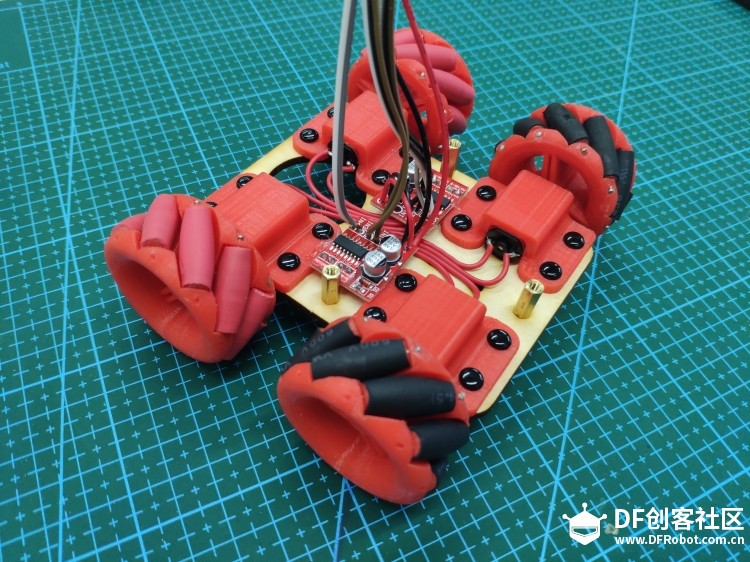 2、准备好前挡板与电池仓挡板以及固定件 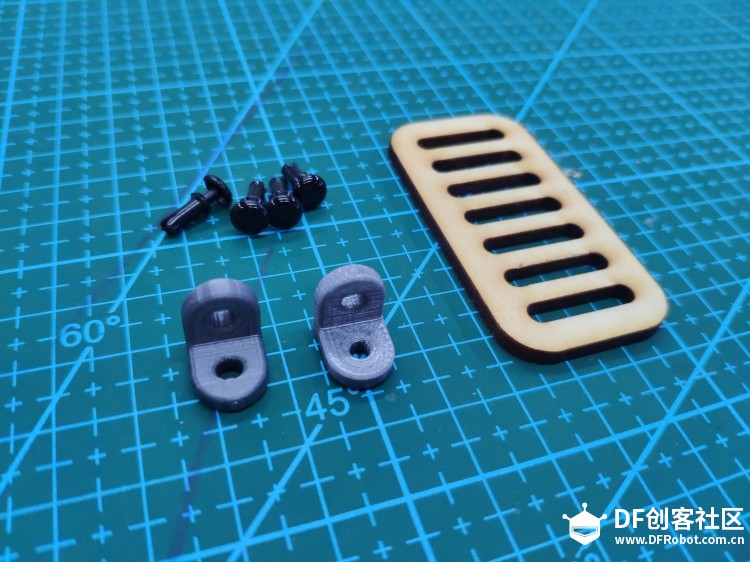 前挡板与固定件  电池仓挡板与固定件 3、安装好电池仓与前挡板。 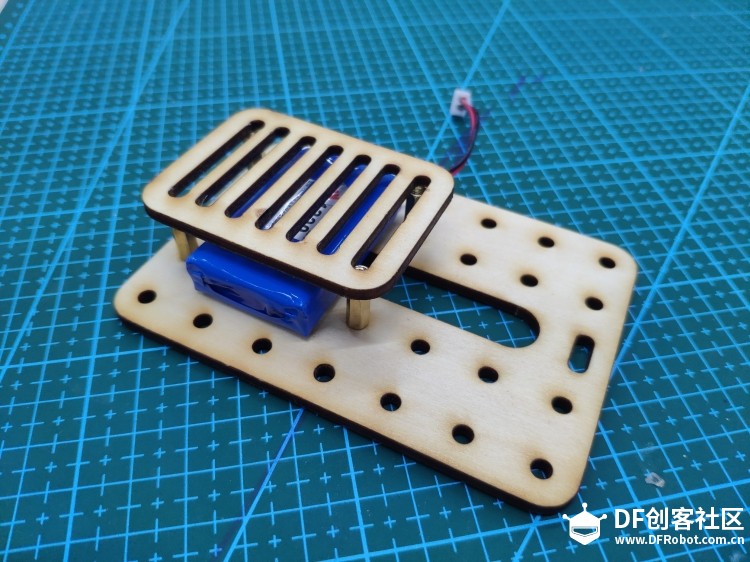 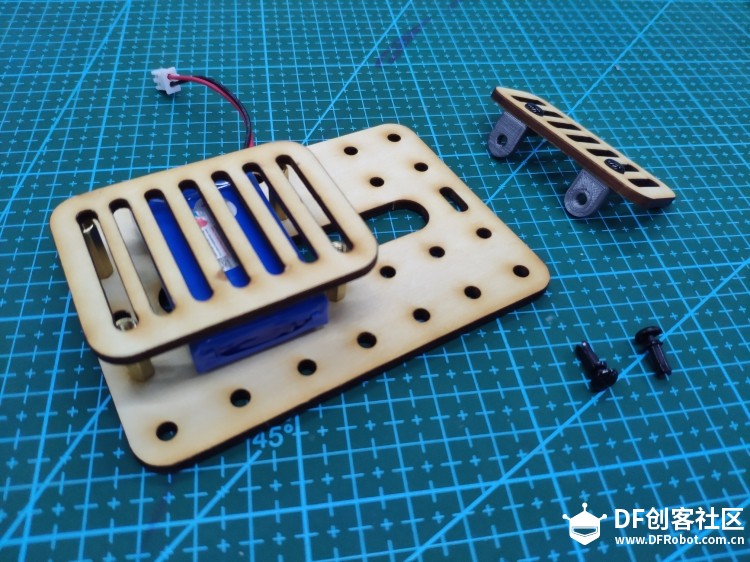 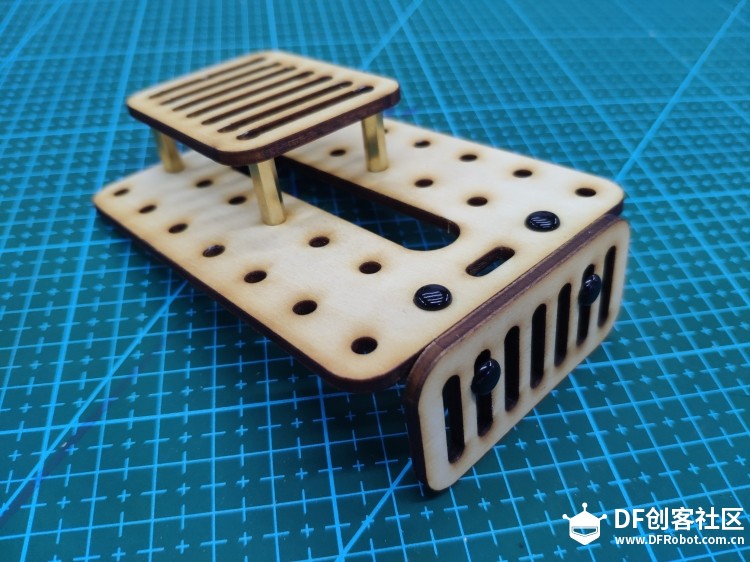 4、将Arduino核心板固定好后,将底板引出信号线与电源线接好。共8根信号线控制4个电机的正反转 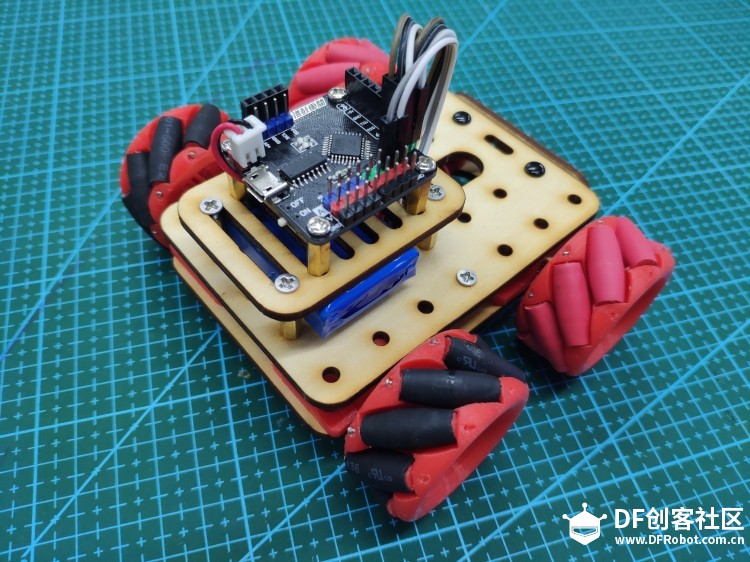 5、将超声波模块和固定座固定好后装在小车上。适当移动电池与零件位置,将小车重心保持在小车中间位置,至此,麦克纳姆轮小车就完成啦!完成后的麦轮战车,是不是还有点萌呢?  恩,其实我还能换头像呢~ 分分钟换个 skr skr 的麦熊头像!  ## 麦克纳姆轮战车电路 此小车采用的是捣鼓车间出品的Athena核心控制板,自带传感器接口与蓝牙接口,可以满足大部分项目需求。 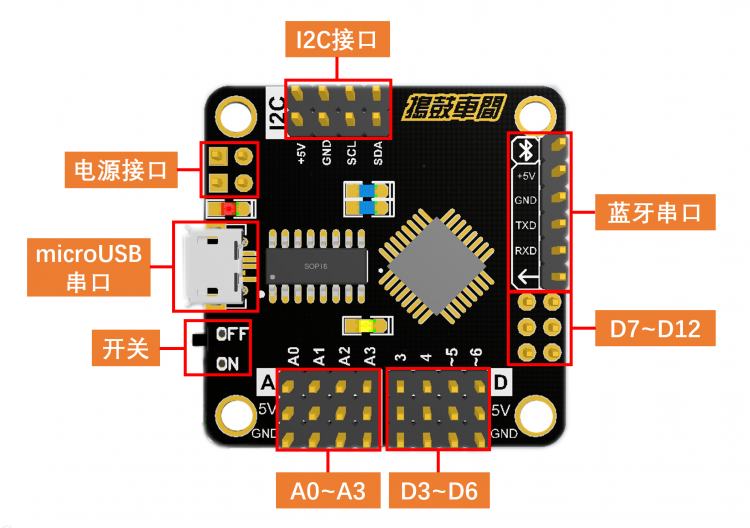 Athena核心控制板 我们知道Arduino不管是UNO还是Nano,都只有6个PWM口(3、5、6、9、10、11),没法实现8个电机的调速,MEGA2560有8个以上的PWM口,但是体积过大,不适合该项目,我在引脚分配上做出了调整,使用4个PWM与4个数字口就可以实现4个电机的调速,我们知道PWM简而言之就是数字口的占空比,当一个引脚为低电平,一个输出PWM信号时,可以调节速度为0~255,255为最快。经过试验,一个引脚为高电平时,一个输出PWM信号时,调节速度也是0~255,区别就是255是停止,PWM输出0时为最快。这样,只需要在程序中调节PWM的参数与数字口的输出,就可以控制电机的速度与旋转方向了。调速说明如表1所示。 表1:调速说明
注:表中“1”代表高电平;“0”代表低电平;“PWM”代表调制脉宽波。IN1、IN2控制电机A;IN3、IN4控制电机B。 有了Athena核心控制板的介绍和PWM调速说明,整个麦轮战车的电路原理图就很简单啦。 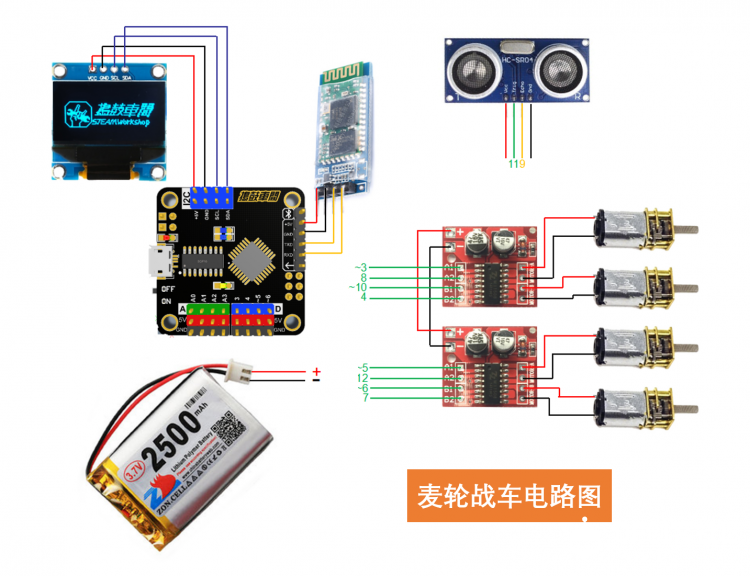 ## 麦克纳姆轮控制程序 麦克纳姆轮与普通轮子的区别在于麦克纳姆轮旋转时,由于存在斜向的从动轮,会同时产生一个斜向的力,当我们控制轮子旋转的速度与方向时,将斜向的力增强或抵消,从而实现小车的全向移动。可以完成横移、斜方向移动等普通小车无法完成的高难度动作。 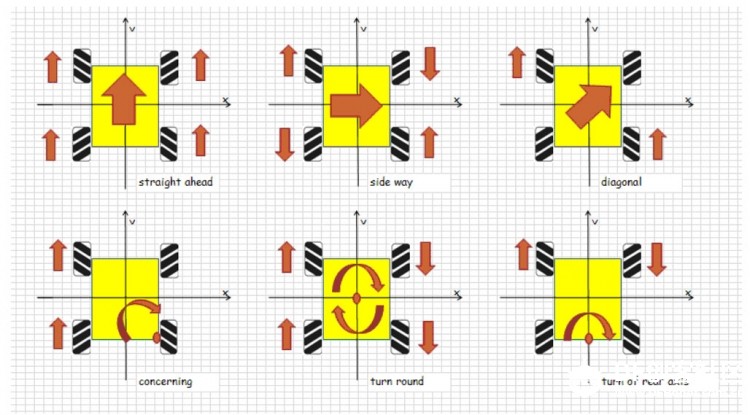 麦轮战车采用手机App遥控的方式来进行操作,手机端控制采用的是“可控Ctrl”App(App作者个人网站:https://www.pengzhihui.xyz/),可在腾讯应用宝下载。手机与战车之间通过蓝牙通信,手机端通过摇杆控制小车的全向移动。 麦轮战车下位机端的编程思路是:摇杆通过蓝牙返回Joy_x与Joy_y两个变量,最大为1,最小为-1,两坐标遍历半径为1的圆内,程序中有8个方向移动的子程序,程序思路是摇杆半径大于0.5以后,开始判断属于哪个范围内,并执行相对应的子程序。最开始采用的是判断坐标范围,发现效果并不理想。最终采用通过Y/X计算tan值大小与Joy_x与Joy_y构成坐标的象限,计算出所在的区域,这样的方法在内圆内不作执行指令,方便操作。另外可以将整周的圆八等分,算法简洁可靠。摇杆部分算法如图19所示,完整程序详见附件。 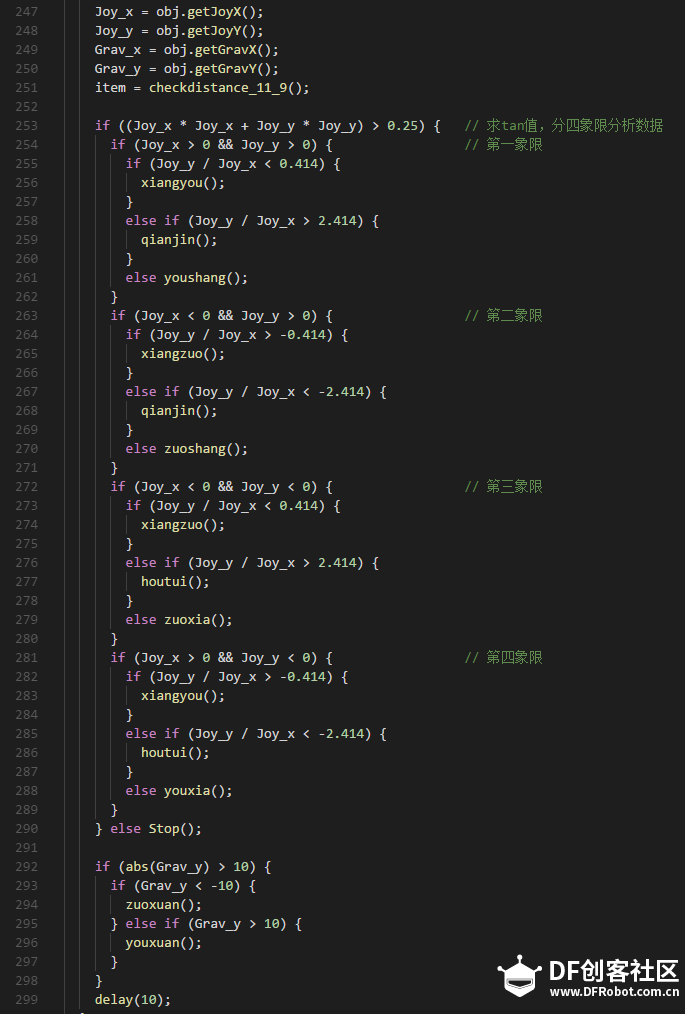 至此,完整的麦轮战车就完成啦! ## 附件 最后再打个小广告:欢迎关注我的个人公众号“铁熊玩创客”,回复“麦熊战车”,获取模型和程序下载链接。 |

1.12 MB, 阅读权限: 30, 下载次数: 42
2.43 KB, 阅读权限: 30, 下载次数: 31
程序

902.8 KB, 下载次数: 24163
程序头文件



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 精华
精华
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






