|
21900| 5
|
[入门教程] 麦小昆|小车多种线宽巡线与停车标记测试 |
本帖最后由 rzyzzxw 于 2019-10-31 18:36 编辑  麦昆3.0走DF官方宽黑线地图及遇白线停车,基本思路是,麦昆遇到标记停车否则寻线。  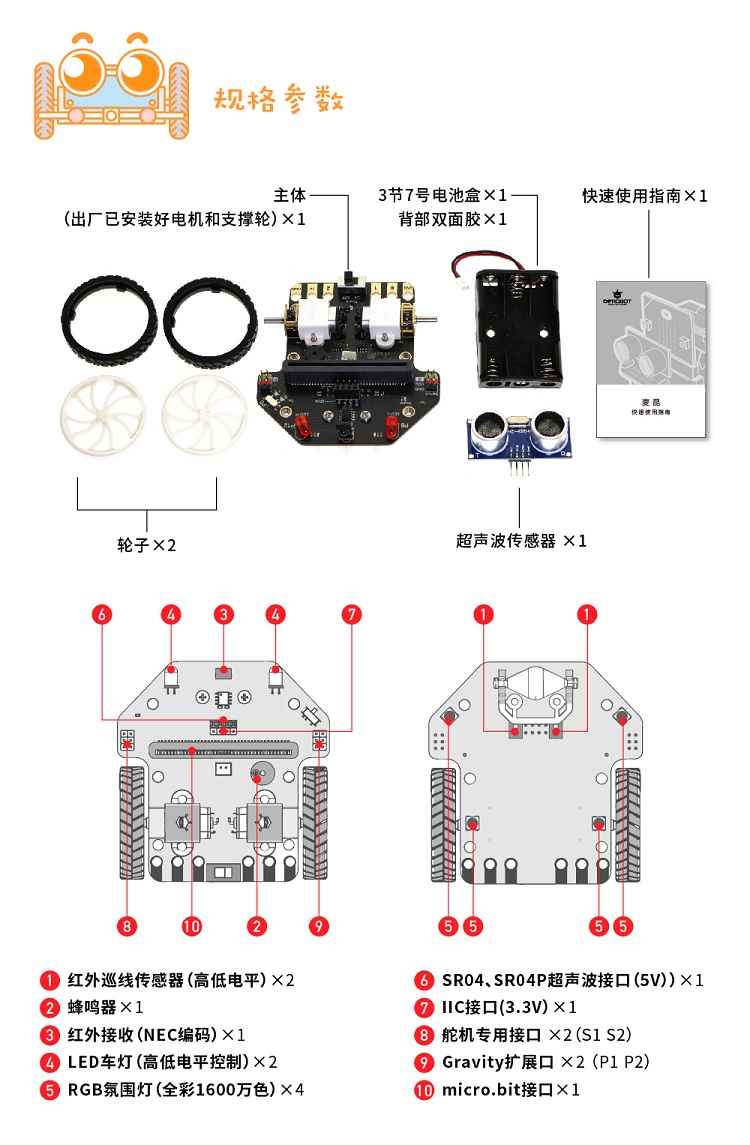  说到巡线,同学们应该相当熟悉。 首先,我们知道,麦昆的两个数字红外传感器之间的距离是15mm,传感器在黑线上读数为0,白纸上读数为1。 两个红外传感器,可以检测路面上的反光情况,从而分辨黑色与白色,那么基础的巡线原理为:向左偏,向右转;向右偏,向左转。但是,有过自己组装巡线机器人经验的同学都知道,两个传感器之间的距离,是会对巡线效果产生很大影响的。 情境1,麦昆3.0两个寻线传感器间的距离约15mm,DF这个地图的黑线可真是宽。 巡线原理为:向左偏,向右转;向右偏,向左转。 那么两个传感器在线上,我们就令麦昆直行。 我们用白纸条做停车标记。 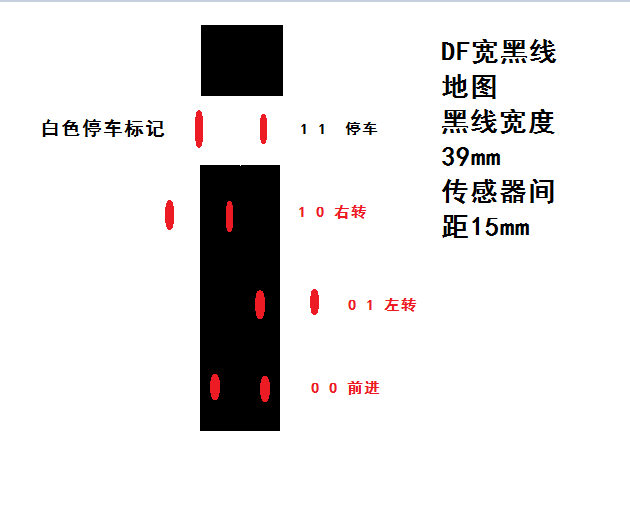 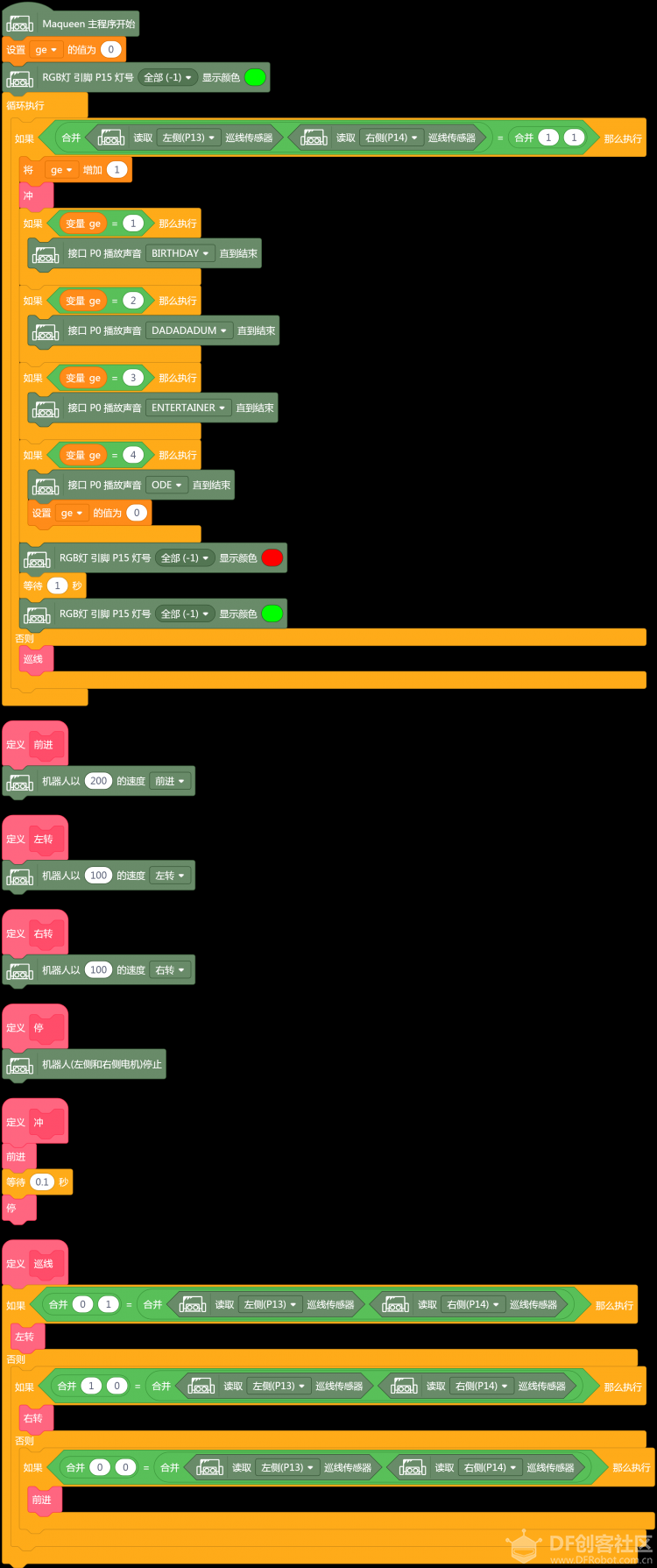 情境2,麦昆3.0两个寻线传感器间的距离约15mm,DF地图的黑线也是15mm宽。 micro:bit麦昆编程机器人小车巡线地图https://www.dfrobot.com.cn/goods-1882.html 先看下官方寻线makecode例程 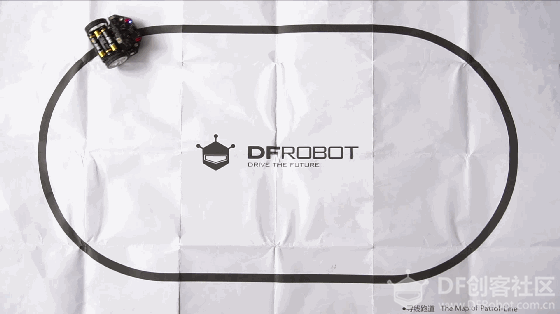 makecode程序链接:https://makecode.microbit.org/_1VzX7LLAC3im makecode图形化程序截图 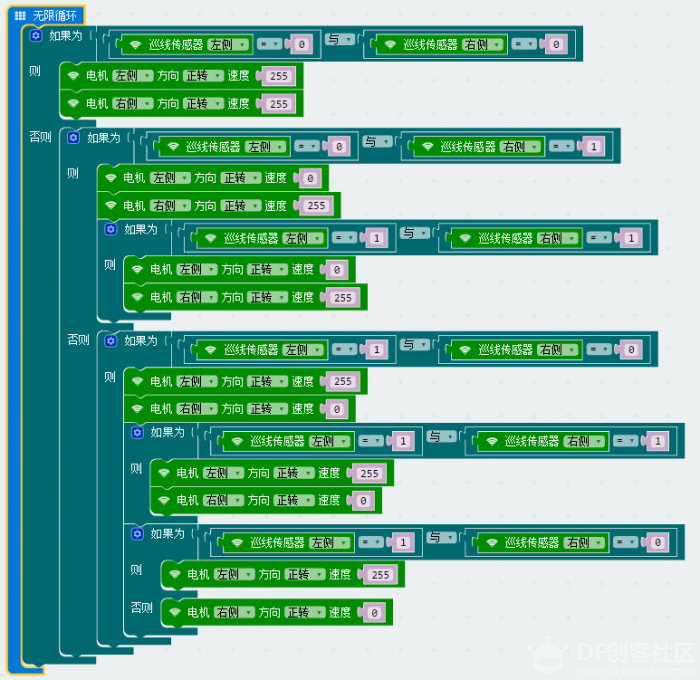 巡线原理为:向左偏【10】,向右转;向右偏【01】,向左转。 那么两个传感器骑【11】在线上,我们就令麦昆直行。 两者同宽,我们用黑胶带或者黑色纸片做停车标记【11】。 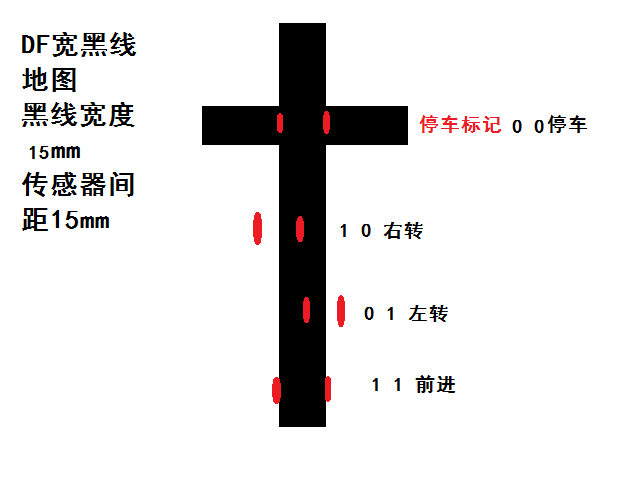 看下我的寻线与停车测试效果。 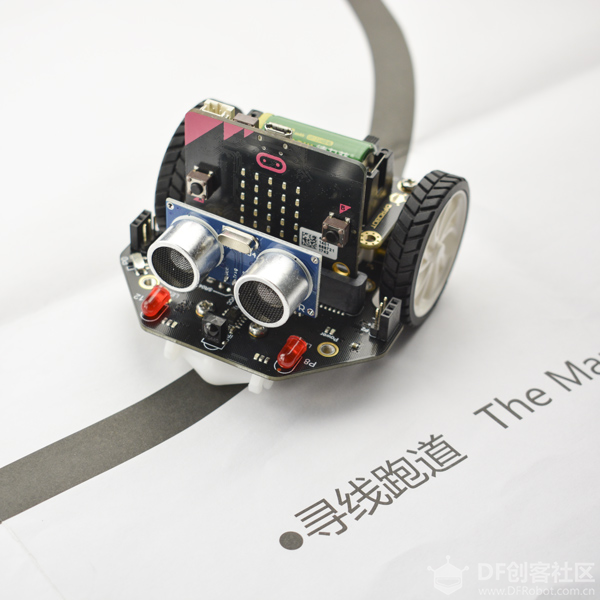 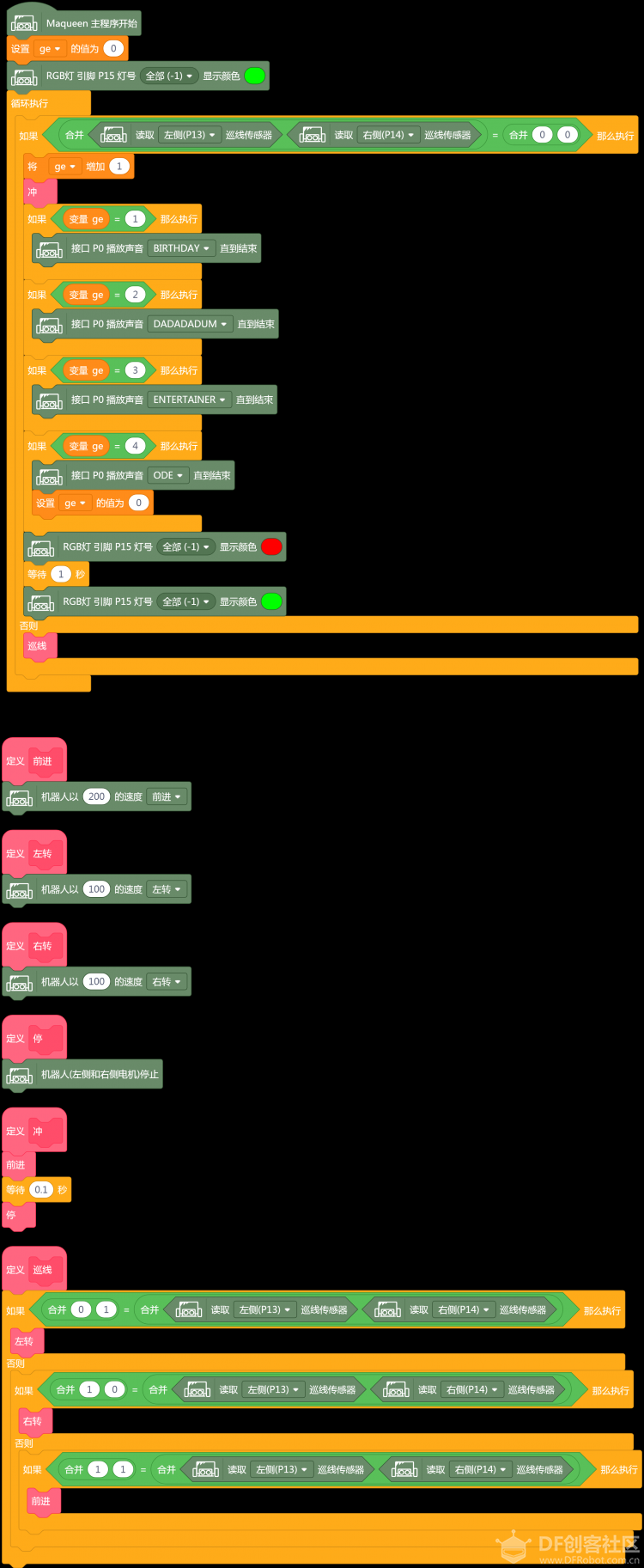 情境3,麦昆寻线走黑色电胶带地图,电胶带18mm宽,略宽于麦昆传感器间距15mm。 巡线原理为:向左偏【10】,向右转;向右偏【01】,向左转。 那么两个传感器【00】在线上,我们就令麦昆直行。 我们用白纸条或者间断来做停车标记。【11】。 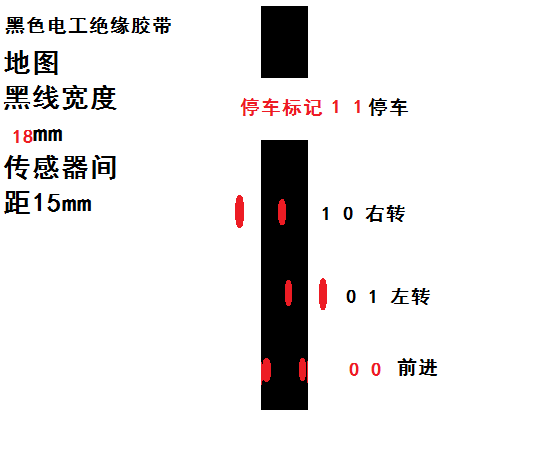  测试效果视频 程序中是依靠小车惯性过标志位的,如果小车过不了停车标志,请冲过去。 例如: 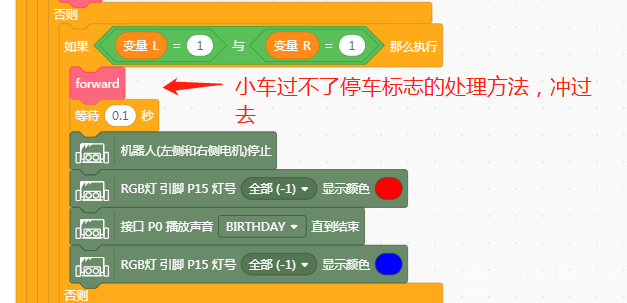 情境4,修窄版绝缘胶带【8mm-12mm不等】 测试地图如图,用正常18mm胶带做停车标志与修剪的胶带做对比。 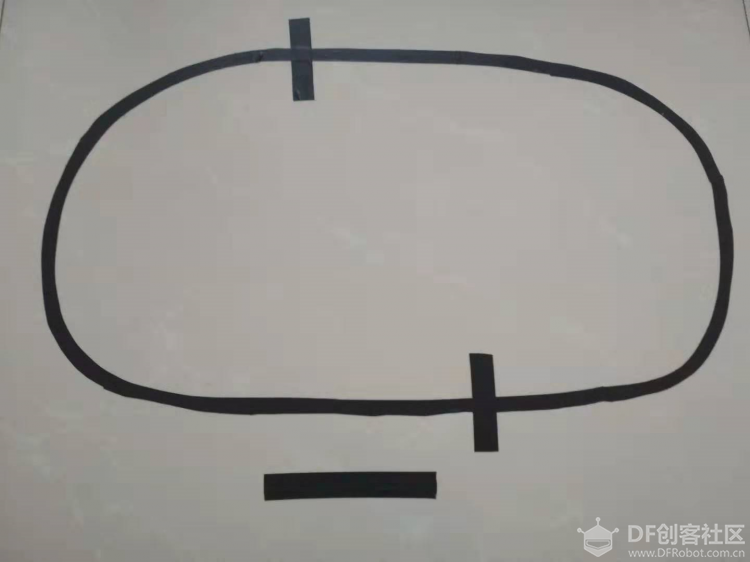 巡线原理为:向左偏【10】,向右转;向右偏【01】,向左转。 那么两个传感器骑【11】在线上,我们就令麦昆直行。 我们用黑胶带或者黑色纸片做停车标记【11】。 测试: 线有点窄,为了防止小车运行中惯性大脱线,要调低左右转及前进车速。 小结: 综上所述,麦昆寻线及遇标志停车,要根据传感器间距与黑线线宽分两种情况。 1、当传感器间距大于或者等于黑线线宽,传感器夹着黑线【11】前进,用黑线标记【00】停车。 2、当传感器间距小于黑线线宽,传感器在黑线上时【00】前进,用白色标记【11】停车。 3、车速要根据情况调整,线宽小时,速度要小点,防止小车惯性大脱线。 麦昆:秋名山飙车指南 参考文献: 麦昆:秋名山飙车指南 https://mc.dfrobot.com.cn/thread-275855-1-1.html |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









