|
20303| 2
|
Arduino驱动AHRS AH-100B军工级惯性导航模块 |
|
本帖最后由 lauren 于 2014-7-20 21:05 编辑 最近有一个偶然的机会,有一位小伙伴提供了他的惯性导航模块,让我帮他接入Arduino并且将进行协议解析将惯性导航数据通过WIFI推送到电脑上。说实话还挺好奇所谓的军工级惯性导航模块性能与我们常见的100+块的10 DoF传感器差异有多大。貌似就内置了卡尔曼滤波,并拥有不错的防水性能。 今天刚刚跑通,不得不吐槽下,国内的这类产品虽然价格高的离谱,淘宝价要1800RMB,但是不论从用户手册到二次开发的源码资源和周边的技术文档。我都只能说和taobao上10块的开发板没什么区别。文档和用户附加值实在太差了。我相信就算是技术牛人,也希望供应商提供更完善的资源,减少自己的开发成本。别说我们这些弱弱的用户了。开发资源实在太匮乏了。上位机源码是只有VC平台上的不说,居然还只是局部代码。。。=。难道是我玩开源的东西太多了... 不过不管怎么说,今天使用Arduino抽到了AH-100B惯性导航的数据,心情还不错(关键太久没玩这种高端传感器了,皮痒)。性能还没有和普通10轴做过对比,对比测试方法也还没构思好(希望有识之士能给点意见)。 晒晒收获....  产品图 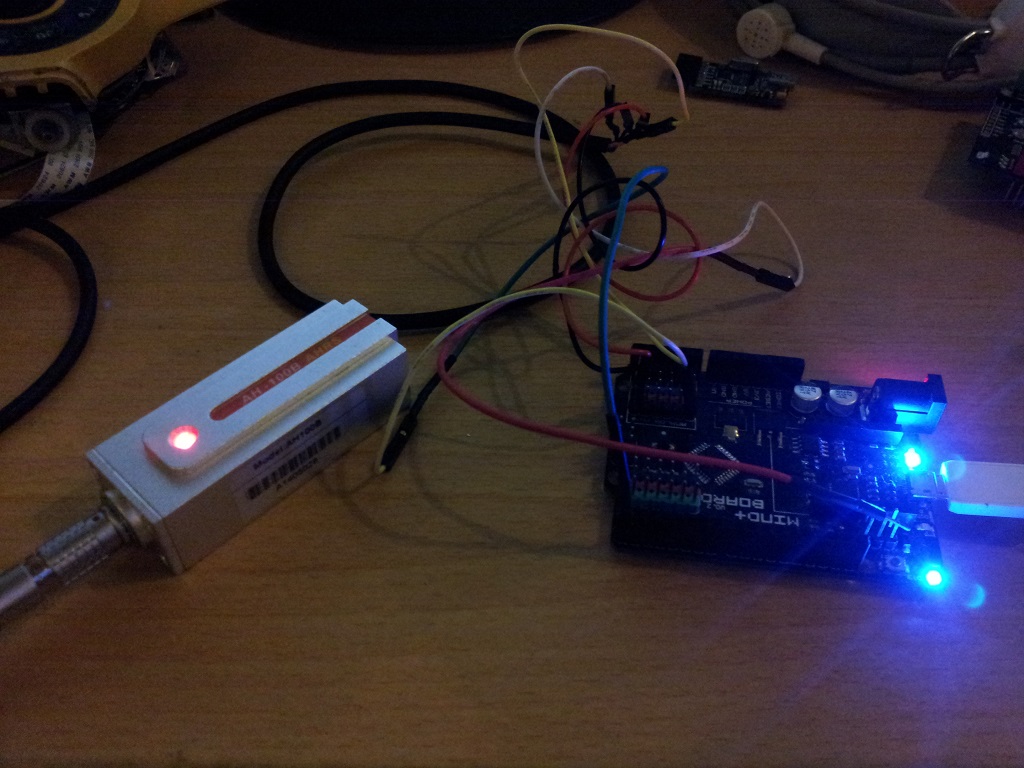 模糊连线图,就是Arduino Uno Rx接惯性导航TX,然后USB推送到上位机解析好的数据。 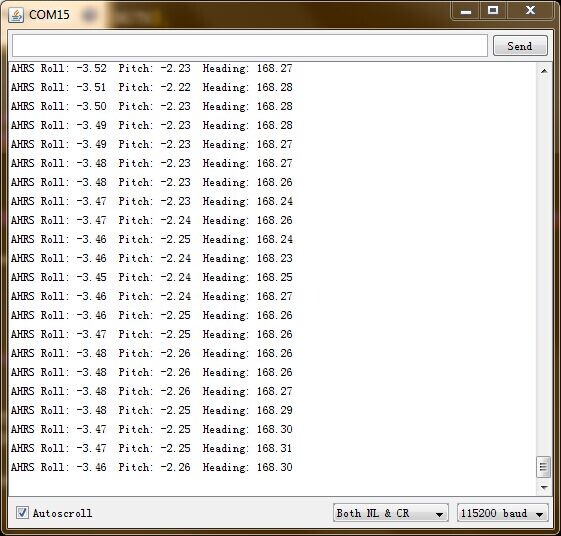 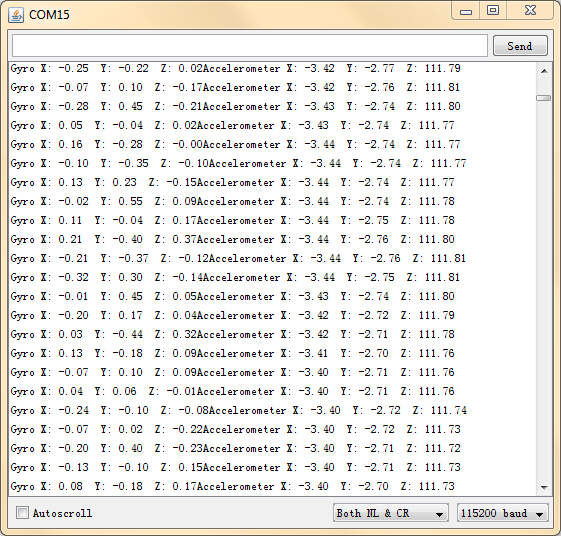 附件有AH-100B的通讯协议,上图是解析出来的数据。那协议本身还挺标准,就是花时间。我最好,copy到平台上就能用,可惜不现实o(╯□╰)o #include <Metro.h> //Include Metro library 以上是基于AH-100B供应商提供的数据解析包基础上,编辑的Arduino部分源码,不复杂,但是略微调整过一些他们官方解析包的内容,花了点时间。 如果还有小伙伴也在玩AH-100B,欢迎评论分享。下一步打算研究下基于惯性导航的机器人路径绘制(应朋友的需求o(╯□╰)o)。 |

AHRS Protocol Specification.pdf
112.02 KB, 下载次数: 5415
AH-100B通讯协议
580.15 KB, 下载次数: 5848
hkabaga 发表于 2016-3-5 17:11 Though it's really late. But just share the library via Baidu Yun. Please check the link below: http://pan.baidu.com/share/link? ... 59&uk=658304257 |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






