|
18826| 17
|
[项目] 3D打印Ommi Wheels 全向小车【原创】 |
|
本帖最后由 swanglei 于 2014-8-19 17:35 编辑 最近设计了这款全向小车,前些日子刚好有个百度主办的创客马拉松比赛,然后我其实自己特别一直想做一个全向垃圾桶,它可以很灵活地在地面上移动。其实就是类似一两年前有个日本牛人DIY的一个垃圾桶,视频上他在那里打字,然后将废纸卷卷随便向身后一抛,垃圾桶就可以自动上前接住,它的实现方式是通过Kinect识别纸团并且预先计算好纸团的落点,然后垃圾桶快速移动到落点,当然了,设计师还巧妙地设计了内部的传动结构,仅仅使用了两个电机一个控制轮子正反转,另外一个小电机控制轮子的转向。然后我就很想自己找个牛逼的软件工程师跟我合作,我负责硬件方面,一起做出这个全向垃圾桶。但是,最后没能抱上大腿,都说实在太难了,搞不定,我就只能自己一个人先默默地做好全向运动平台了。  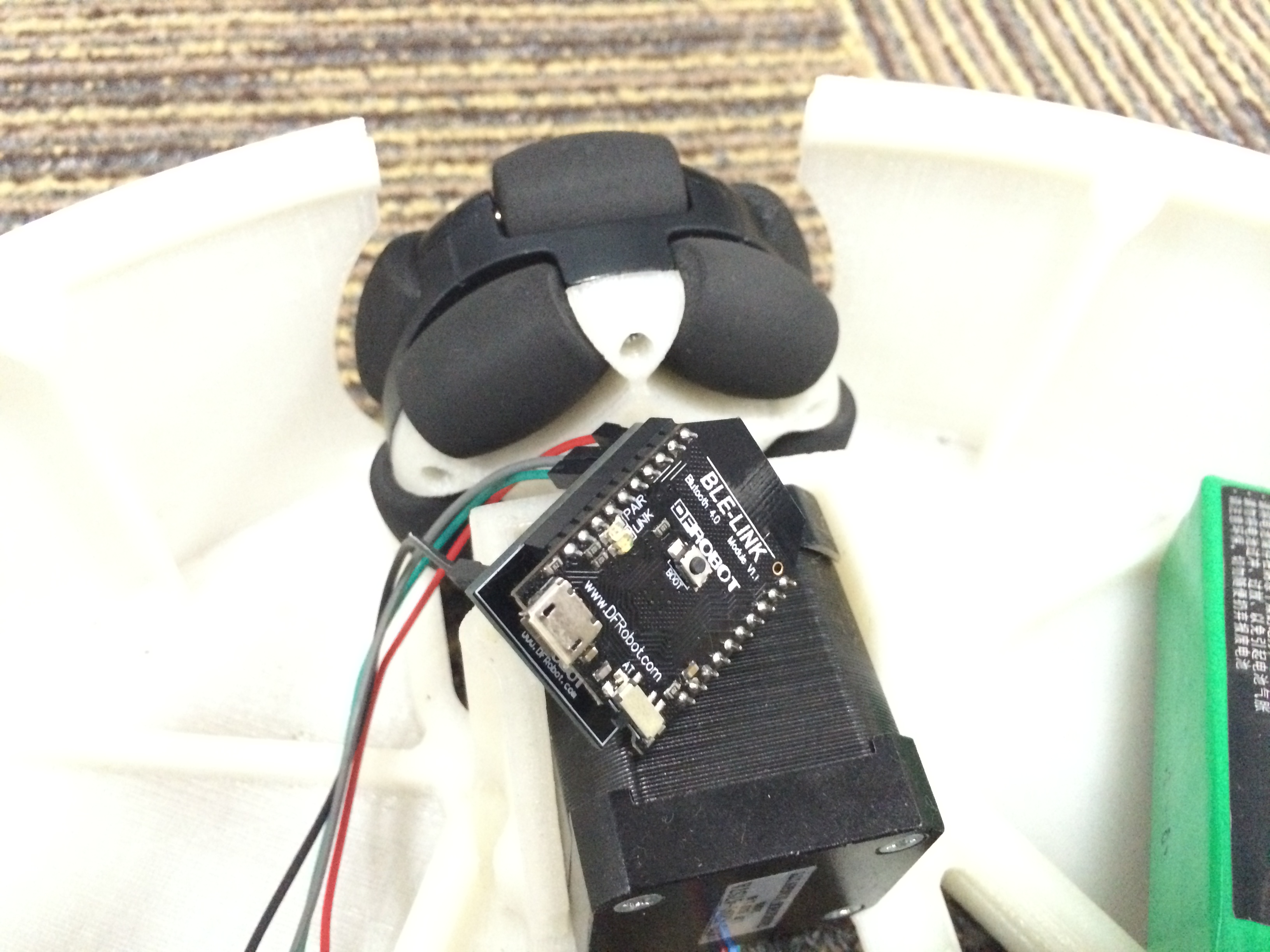 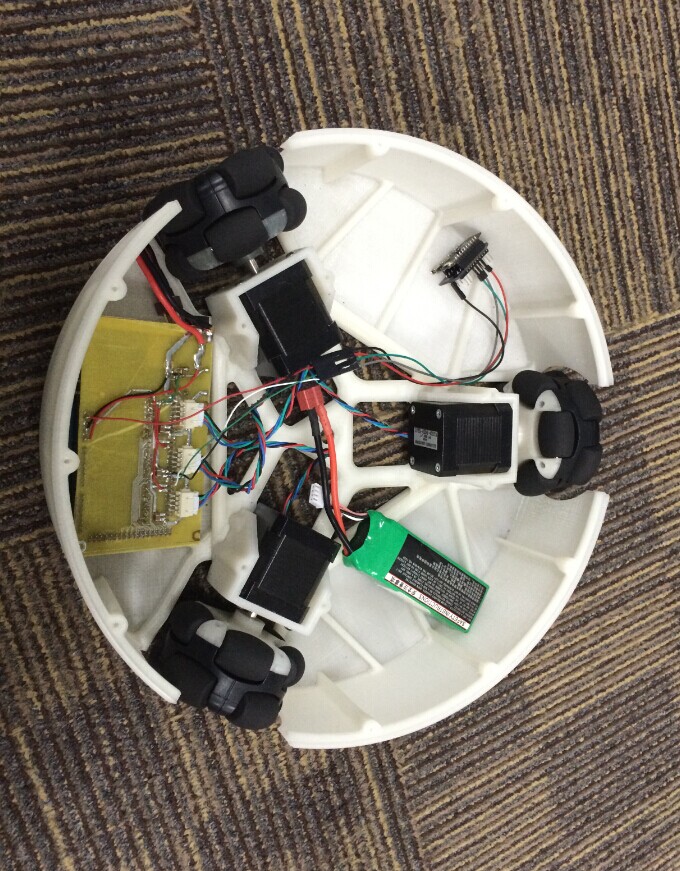 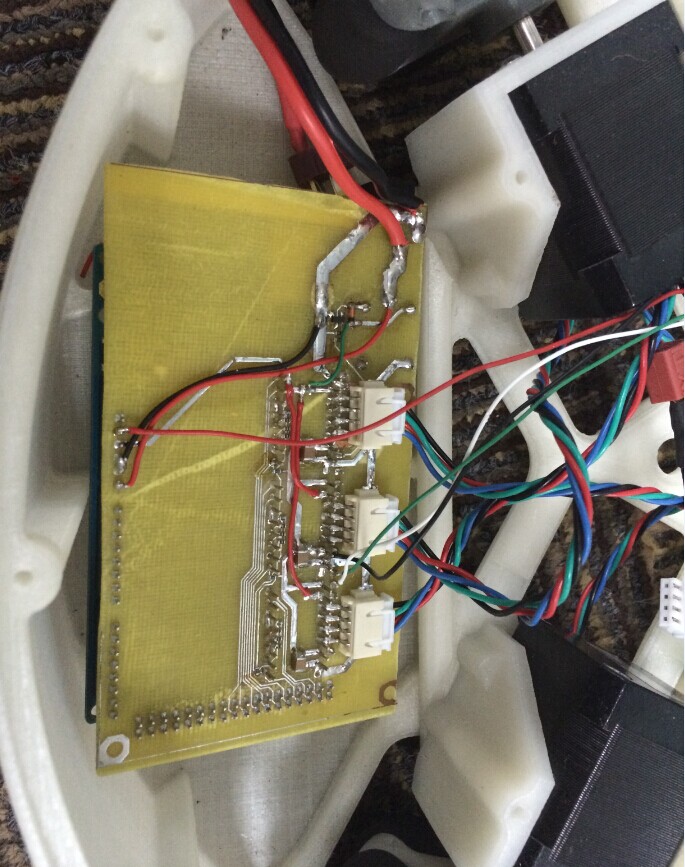 |
|
这里面我想将这个垃圾筒的传动方式进行改进,我更希望做一款瑞典轮的全向小车,而且现在还处于验证阶段,所有的设计都是以最简便最省钱为主,那直接想到了之前公司买的Rovio。 我先是将它的整个机器人拆掉,然后分别拆开了编码器,将全向轮与减速电机分离,然后最后将整个轮子的轮毂拆开并且进行了逆向,其实说实话要是没良心点都在可以直接拿我的模型去开模,因为我连拔模角度都算上去了。然后我又开始考虑怎么构成我要做的机器人,首先我对它的需求是验证性先做个简单的圆形结构外壳,由手头上的42步进电机驱动三个全向轮,然后为了壁障的需求,顶部增加一个激光雷达。那么对外形的外框的设计需求就是尽量的底、薄。  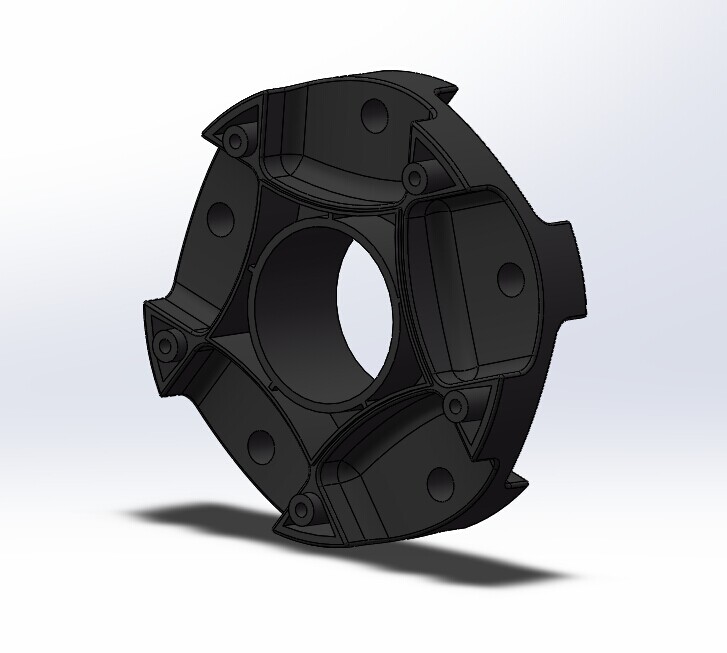  |
诶,说实话没有现成的合适的电路板,我就只能自己花点业余时间设计了张单面板PCB,自己用热转印的方式临时做了张电路板,三个步进电机的驱动信号引脚都是按照我们自己的打印机的XYZ三个轴的引脚定义,然后电路板仅仅增加了个5V驱动的继电器,单片机可以直接控制总电源对电机驱动的供电。由于是单面板,也有点贪婪,更何况一个小时之内设计好的电路板,有两条5v的线没办法在同层布了,我就最后做好板子直接飞线了!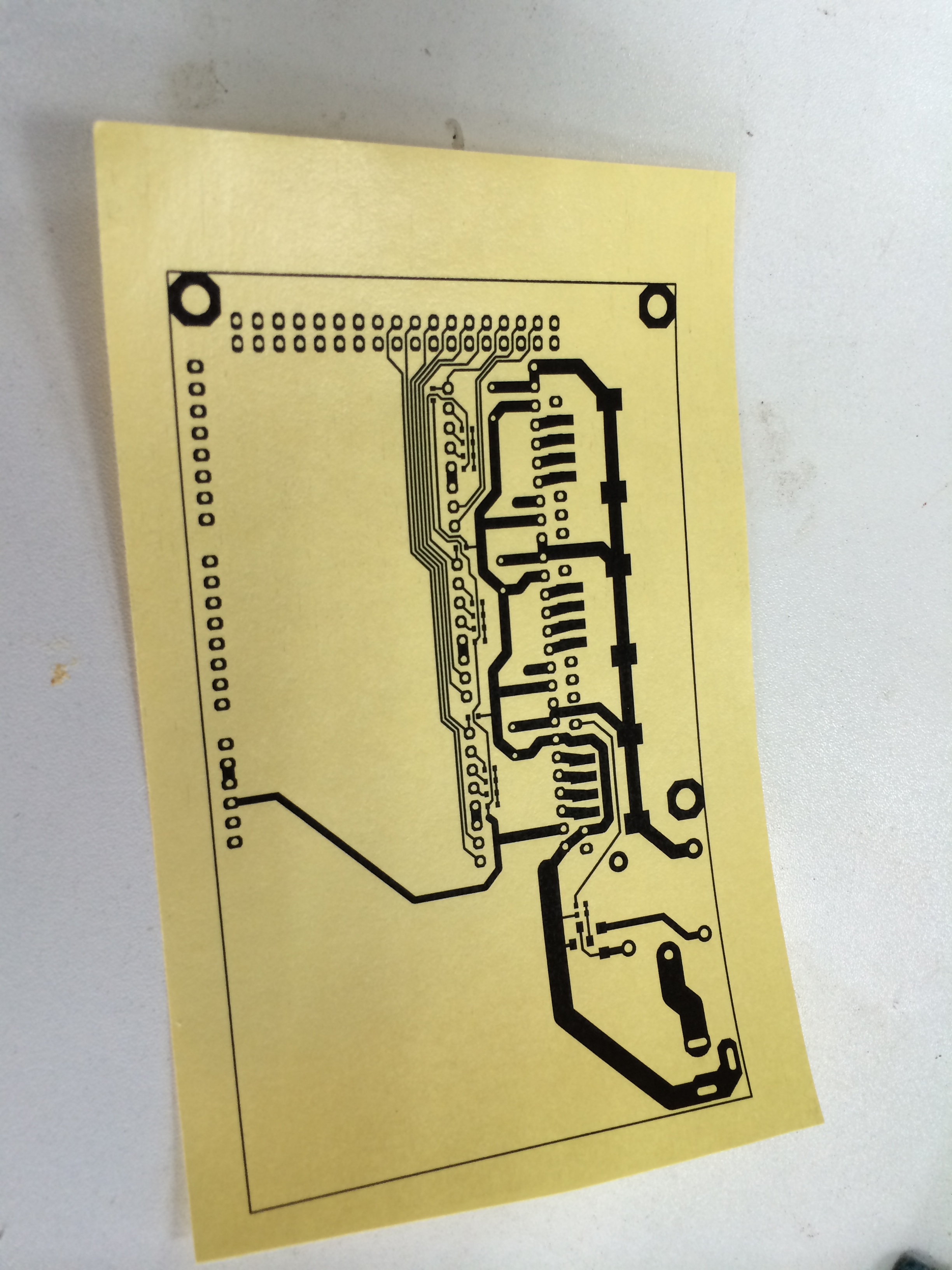   这里说实话真的要是写个热转印的教程都可以单独发个帖子了,这里我先暂时略过。 (先转印,腐蚀,钻孔最后铺锡焊电路~~~焊接忘记照相了,不好意思)  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖






