|
8942| 8
|
[入门教程] 【嘉年华展示】狄仁杰机甲|基于UDP广播无线遥控模式 |
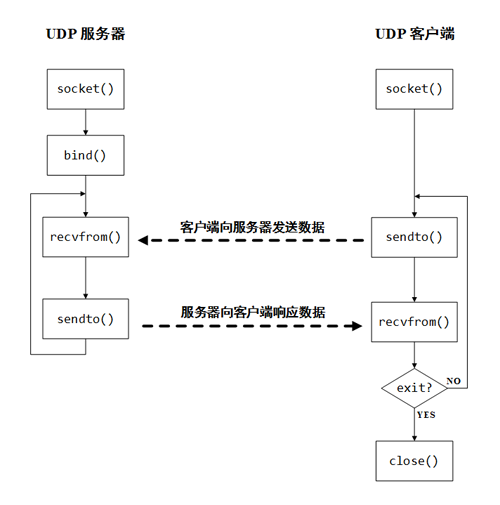
本帖最后由 rzyzzxw 于 2019-9-19 08:28 编辑  今天探讨的是狄仁杰机甲|基于mind+UDP的掌控无线遥控模式。亲测响应速度很快。 赞一下DF工程师,做出这么个好用的功能。  [来自李亮工程师的画外音]udp广播也是用wifi的原理实现的,其中一块板子作为路由器发出wifi,然后其他板子链接这个。 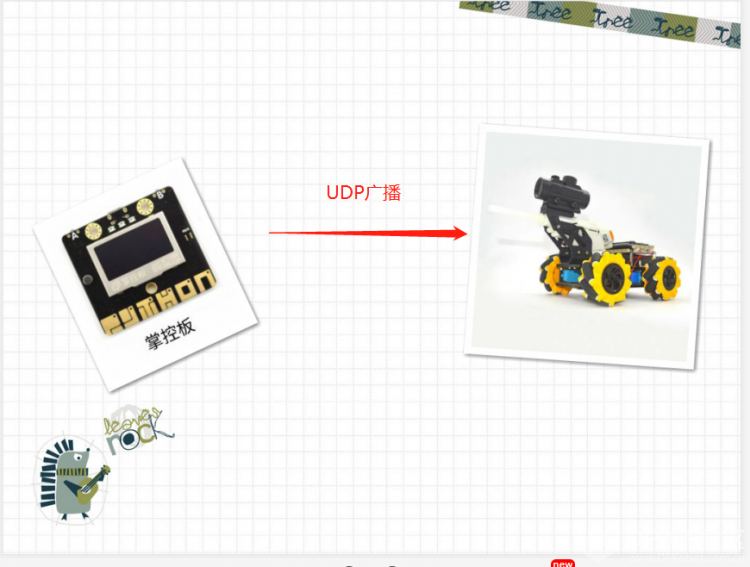 测试视频 器材准备: 狄仁杰机甲 1 掌控板 1 盘古扩展板(可选) 1 micro:bit手柄(可选) 1  【特别提示:机甲千万条,安全第一条。使用不规范,亲人两行泪】 【特别提示:水弹波箱是物理能量输出单元,射出水弹有较高速度,请勿对准人和动物及他人财物,请佩戴护目镜】 【本项目电机及接线按组装说明进行】 1、硬件准备 UDP服务器:狄仁杰机甲 UDP客户端:遥控掌控板 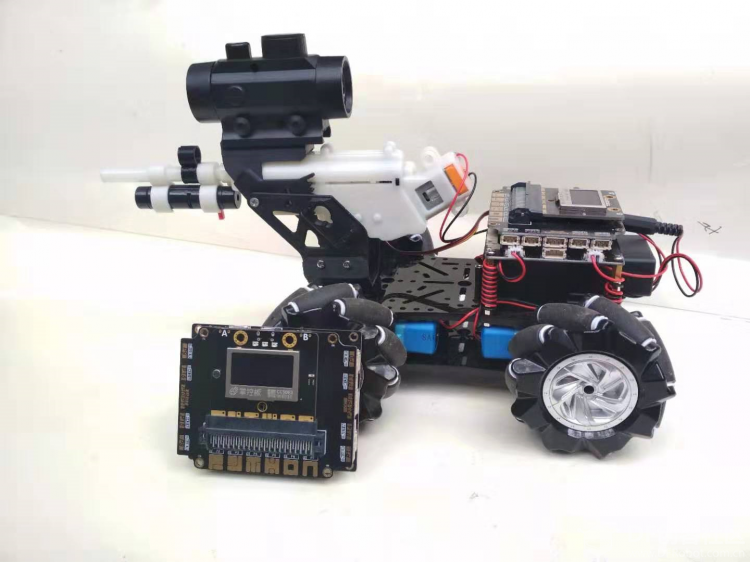 触摸P 发送W 机甲接收 前进 触摸N 发送X 机甲接收 后退 触摸T 发送A 机甲接收 左移 触摸H 发送D 机甲接收 右移 按A按钮 发送R 机甲接收 抬枪 按B按钮 发送Vi 机甲接收 压枪 按A+B按钮 发送F 机甲接收 发射 2、编程平台:Mind+ v1.5.6 3、编程首先选择“上传模式--Arduino C”,选择扩展中的掌控板--WIFI和UDP网络模块   4、UDP服务器(机甲小车端): 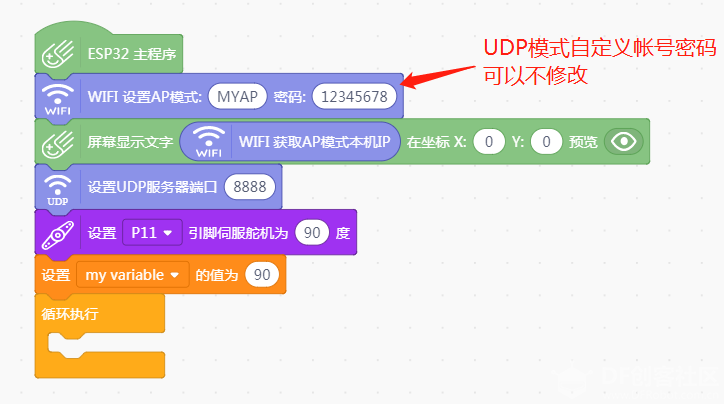 接收W前进X后退A左移D右移R抬枪V压枪F发射  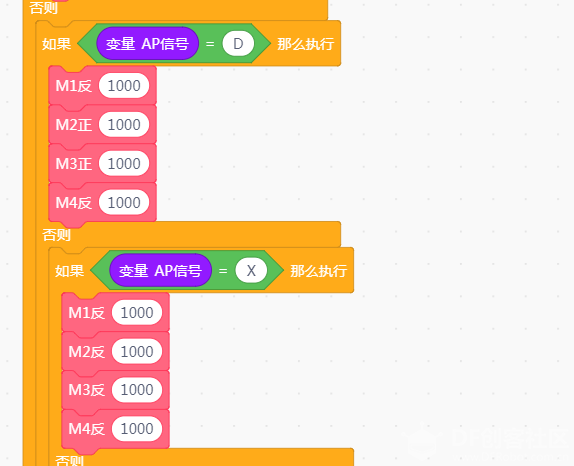 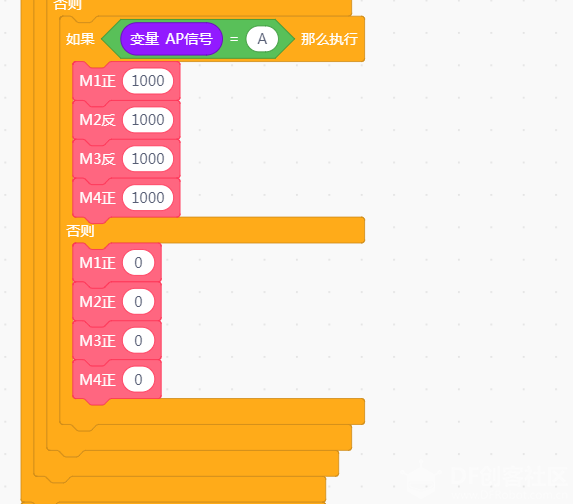 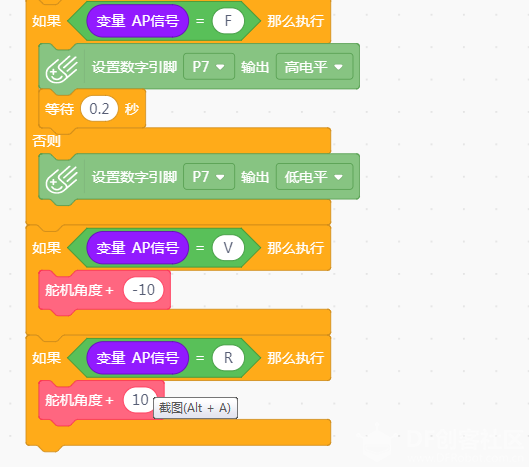 电机函数   舵机控制函数  5、遥控端掌控板 编程首先选择“上传模式--Arduino C”,选择扩展中的掌控板--WIFI和UDP网络模块 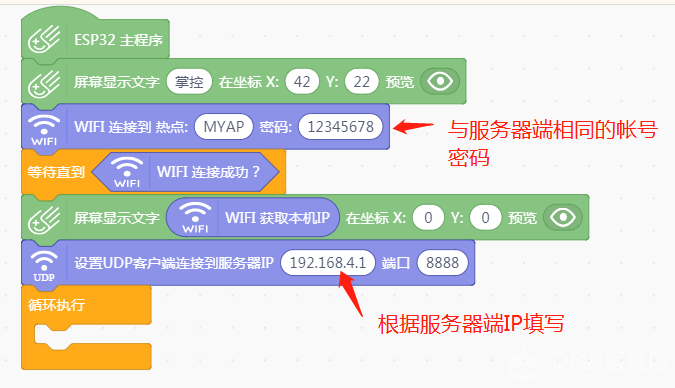 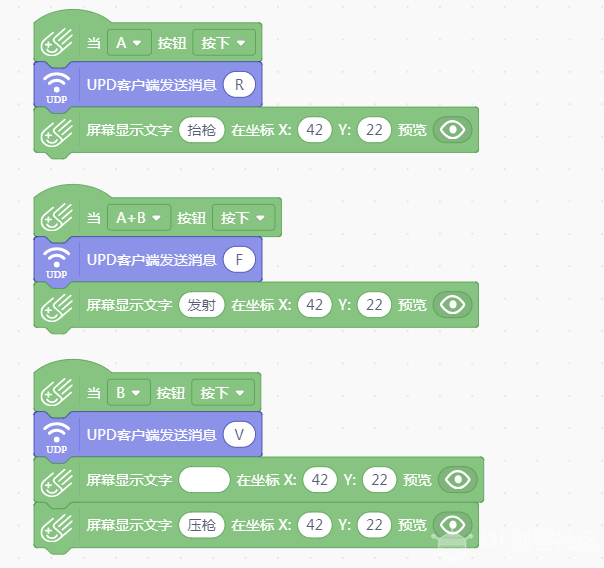   程序附后:  掌控板遥控AP0.zip掌控机甲狄仁杰AP0.zip 掌控板遥控AP0.zip掌控机甲狄仁杰AP0.zip 6、先开启机甲小车服务器端,再开启遥控掌控端 开始愉快的测试吧 7、如果用手柄要把遥控端的程序改造一下哦。 用了手柄还很帅,省去了一个大斧头扩展板,而且操控体验更好了。 放到嘉年华现场,装上水晶弹,小朋友们会不支喜欢呢。 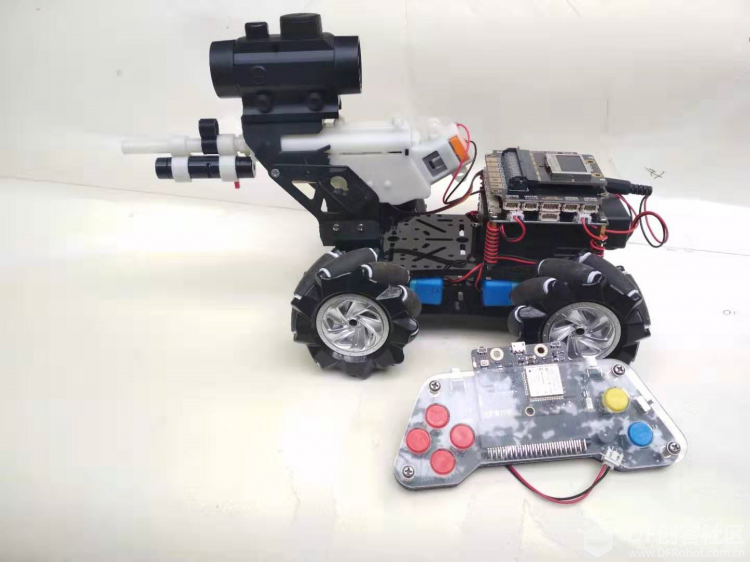 【提示,掌控用手柄时要用3.7V锂电池供电,而且是反插】   修改发送端程序: 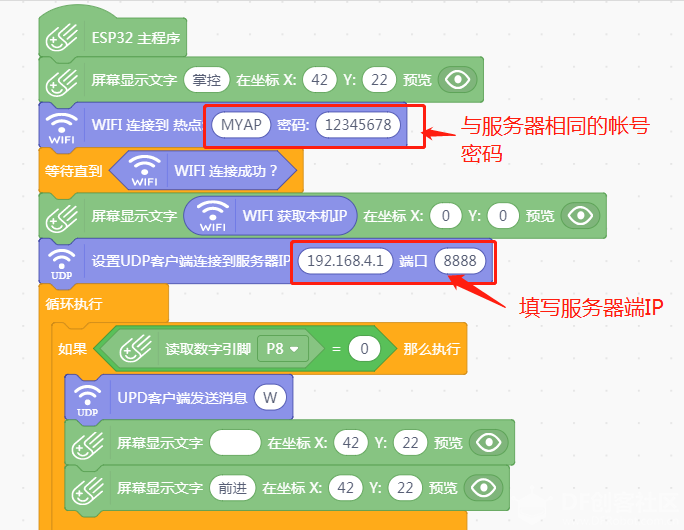     参考程序: UDP掌控板手柄遥控.zip测试视频:晚上手机拍的,凑合着  本帖参考: 用掌控板UDP网络遥控麦昆小车 https://mc.dfrobot.com.cn/thread-296615-1-1.html 相关资料1: 就是转过来,咱也没看懂。  TCP协议与UDP协议的区别 https://**ceres.comblogs.com/bizhu/archive/2012/05/12/2497493.html 首先咱们弄清楚,TCP协议和UCP协议与TCP/IP协议的联系,很多人犯糊涂了,一直都是说TCP/IP协议与UDP协议的区别,我觉得这是没有从本质上弄清楚网络通信! TCP/IP协议是一个协议簇。里面包括很多协议的。UDP只是其中的一个。之所以命名为TCP/IP协议,因为TCP,IP协议是两个很重要的协议,就用他两命名了。 TCP/IP协议集包括应用层,传输层,网络层,网络访问层。 其中应用层包括: 超文本传输协议(HTTP):万维网的基本协议. 文件传输(TFTP简单文件传输协议): 远程登录(Telnet),提供远程访问其它主机功能,它允许用户登录 internet主机,并在这台主机上执行命令. 网络管理(SNMP简单网络管理协议),该协议提供了监控网络设备的方法,以及配置管理,统计信息收集,性能管理及安全管理等. 域名系统(DNS),该系统用于在internet中将域名及其公共广播的网络节点转换成IP地址. 其次网络层包括: Internet协议(IP) Internet控制信息协议(ICMP) 地址解析协议(ARP) 反向地址解析协议(RARP) 最后说网络访问层:网络访问层又称作主机到网络层(host-to-network).网络访问层的功能包括IP地址与物理地址硬件的映射,以及将IP封装成帧.基于不同硬件类型的网络接口,网络访问层定义了和物理介质的连接. 当然我这里说得不够完善,TCP/IP协议本来就是一门学问,每一个分支都是一个很复杂的流程,但我相信每位学习软件开发的同学都有必要去仔细了解一番。 下面我着重讲解一下TCP协议和UDP协议的区别。 TCP(Transmission Control Protocol,传输控制协议)是面向连接的协议,也就是说,在收发数据前,必须和对方建立可靠的连接。一个TCP连接必须要经过三次“对话”才能建立起来,其中的过程非常复杂,只简单的描述下这三次对话的简单过程:主机A向主机B发出连接请求数据包:“我想给你发数据,可以吗?”,这是第一次对话;主机B向主机A发送同意连接和要求同步(同步就是两台主机一个在发送,一个在接收,协调工作)的数据包:“可以,你什么时候发?”,这是第二次对话;主机A再发出一个数据包确认主机B的要求同步:“我现在就发,你接着吧!”,这是第三次对话。三次“对话”的目的是使数据包的发送和接收同步,经过三次“对话”之后,主机A才向主机B正式发送数据。 详细点说就是:(文章部分转载http://zhangjiangxing-gmail-com.iteye.com,主要是这个人讲解得很到位,的确很容易使人理解!) TCP三次握手过程 1 主机A通过向主机B 发送一个含有同步序列号的标志位的数据段给主机B ,向主机B 请求建立连接,通过这个数据段, 主机A告诉主机B 两件事:我想要和你通信;你可以用哪个序列号作为起始数据段来回应我. 2 主机B 收到主机A的请求后,用一个带有确认应答(ACK)和同步序列号(SYN)标志位的数据段响应主机A,也告诉主机A两件事: 我已经收到你的请求了,你可以传输数据了;你要用哪佧序列号作为起始数据段来回应我 3 主机A收到这个数据段后,再发送一个确认应答,确认已收到主机B 的数据段:"我已收到回复,我现在要开始传输实际数据了 这样3次握手就完成了,主机A和主机B 就可以传输数据了. 3次握手的特点 没有应用层的数据 SYN这个标志位只有在TCP建产连接时才会被置1 握手完成后SYN标志位被置0 TCP建立连接要进行3次握手,而断开连接要进行4次 1 当主机A完成数据传输后,将控制位FIN置1,提出停止TCP连接的请求 2 主机B收到FIN后对其作出响应,确认这一方向上的TCP连接将关闭,将ACK置1 3 由B 端再提出反方向的关闭请求,将FIN置1 4 主机A对主机B的请求进行确认,将ACK置1,双方向的关闭结束. 由TCP的三次握手和四次断开可以看出,TCP使用面向连接的通信方式,大大提高了数据通信的可靠性,使发送数据端 和接收端在数据正式传输前就有了交互,为数据正式传输打下了可靠的基础 名词解释 ACK TCP报头的控制位之一,对数据进行确认.确认由目的端发出,用它来告诉发送端这个序列号之前的数据段 都收到了.比如,确认号为X,则表示前X-1个数据段都收到了,只有当ACK=1时,确认号才有效,当ACK=0时,确认号无效,这时会要求重传数据,保证数据的完整性. SYN 同步序列号,TCP建立连接时将这个位置1 FIN 发送端完成发送任务位,当TCP完成数据传输需要断开时,提出断开连接的一方将这位置1 TCP的包头结构: 源端口 16位 目标端口 16位 序列号 32位 回应序号 32位 TCP头长度 4位 reserved 6位 控制代码 6位 窗口大小 16位 偏移量 16位 校验和 16位 选项 32位(可选) 这样我们得出了TCP包头的最小长度,为20字节。 UDP(User Data Protocol,用户数据报协议) (1) UDP是一个非连接的协议,传输数据之前源端和终端不建立连接,当它想传送时就简单地去抓取来自应用程序的数据,并尽可能快地把它扔到网络上。在发送端,UDP传送数据的速度仅仅是受应用程序生成数据的速度、计算机的能力和传输带宽的限制;在接收端,UDP把每个消息段放在队列中,应用程序每次从队列中读一个消息段。 (2) 由于传输数据不建立连接,因此也就不需要维护连接状态,包括收发状态等,因此一台服务机可同时向多个客户机传输相同的消息。 (3) UDP信息包的标题很短,只有8个字节,相对于TCP的20个字节信息包的额外开销很小。 (4) 吞吐量不受拥挤控制算法的调节,只受应用软件生成数据的速率、传输带宽、源端和终端主机性能的限制。 (5)UDP使用尽最大努力交付,即不保证可靠交付,因此主机不需要维持复杂的链接状态表(这里面有许多参数)。 (6)UDP是面向报文的。发送方的UDP对应用程序交下来的报文,在添加首部后就向下交付给IP层。既不拆分,也不合并,而是保留这些报文的边界,因此,应用程序需要选择合适的报文大小。 我们经常使用“ping”命令来测试两台主机之间TCP/IP通信是否正常,其实“ping”命令的原理就是向对方主机发送UDP数据包,然后对方主机确认收到数据包,如果数据包是否到达的消息及时反馈回来,那么网络就是通的。 UDP的包头结构: 源端口 16位 目的端口 16位 长度 16位 校验和 16位 小结TCP与UDP的区别: 1.基于连接与无连接; 2.对系统资源的要求(TCP较多,UDP少); 3.UDP程序结构较简单; 4.流模式与数据报模式 ; 5.TCP保证数据正确性,UDP可能丢包,TCP保证数据顺序,UDP不保证。 相关资料2: 来自掌控板mPythonX帮助文档 UDP(User Datagram Protocol,用户数据报协议)是一种无连接、不可靠、基于数据报的传输层通信协议。 UDP的通信过程与TCP相比较更为简单,不需要复制的三次握手与四次挥手,体现了无连接。 所以UDP传输速度比TCP快,但容易丟包、数据到达顺序无保证、缺乏拥塞控制、秉承尽最大努力交付的原则,体现了不可靠。 下图讲解服务器与客户端UDP通信連接的交互过程:
Socket UDP通讯过程 10.4.2. UDP编程通常我们在说到的网络编程时默认是指TCP編程,即我们上章节说的TCP方式来通信。 socket函数创建socket对象时,不给定参数,默认为SOCK_STREAM 即socket(socket.AF_INET, socket.SOCK_STREAM),表示为创建创建一个socket用于流式网络通信。 SOCK_STREAM 是面向连接的,即每次收发数据之前必须通过 connect 创建连接,也是双向的,即任何一方都可以收发数据,协议本身提供了一些保障机制保证它是可靠的、有序的,即每个包按照发送的顺序到达接收方。 SOCK_DGRAM 是User Datagram Protocol协议的网络通信,它是无连接的,不可靠的,因为通讯双方发送数据后不知道对方是否已经收到数据,是否正常收到数据。 任何一方socket以后就可以用 sendto 发送数据,也可以用 recvfrom 接收数据。根本不关心对方是否存在,是否发送了数据。它的特点是通讯速度比较快。大家都知道TCP是要经过三次握手的,而UDP沒有。 10.4.2.1. UDP客户端 UDP编程的客户端一般步骤是:
UDP客户端的示例: UDP客户端的示例 [mw_shl_code=python,true]from mpython import * import socket mywifi=wifi() # 创建wifi对象 mywifi.connectWiFi("ssid","password") # 连接网络 dst = ("192.168.0.3", 6000) # 目的ip地址和端口号 # 捕获异常,如果在"try" 代码块中意外中断,则停止关闭套接字 try: s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # 创建UDP的套接字 s.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) # 设置套接字属性 while True: s.sendto(b'hello message from mPython\r\n',dst) # 发送数据发送至目的ip sleep(2) # 当捕获异常,关闭套接字、网络 except: if (s): s.close() mywifi.disconnectWiFi()[/mw_shl_code]
10.4.2.2. UDP服务端 UDP編程的服务器端一般步骤是:
UDP服务端的示例 [mw_shl_code=python,true]from mpython import * import socket mywifi=wifi() # 创建wifi对象 mywifi.connectWiFi("ssid","password") # 连接网络 # 捕获异常,如果在"try" 代码块中意外中断,则停止关闭套接字 try: s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # 创建UDP的套接字 s.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) # 设置套接字属性 ip=mywifi.sta.ifconfig()[0] # 获取本机ip地址 s.bind((ip,6000)) # 绑定ip和端口号 print('waiting...') oled.DispChar("%s:6000" %ip,0,0) oled.show() while True: data,addr=s.recvfrom(1024) # 接收对方发送过来的数据,读取字节设为1024字节,返回(data,addr)二元组 print('received:',data,'from',addr) # 打印接收到数据 oled.fill(0) # 清屏 oled.DispChar("%s" %data.decode(),0,15) # oled显示接收内容 oled.DispChar("from%s" %addr[0],0,31) oled.show() # 当捕获异常,关闭套接字、网络 except: if (s): s.close() mywifi.disconnectWiFi()[/mw_shl_code] 注解 recvfrom() 函数的返回值是二元組 (bytes, address),其中 bytes 是接收到的字节数据,address 是发送方的IP地址于端口号, 用二元組 (host, port) 表示。注意,recv() 函數的返回值只有bytes数据。UDP,在每次发送 sendto() 和接收数据 recvfrom 时均需要指定地址信息于TCP编程不同,不需要调用 listen() 和 accept() 。 注意 上例,使用``connectWiFi()`` 连接同个路由器wifi。 你也可以用 enable_APWiFi() 开启AP模式,自建wifi网络让其他设备接入进来。这样就无需依赖其他路由器wifi网络。 哈哈,我好像只看明白了最后一句。 本项目中,机甲掌控板开启了AP模式,自建WIFI网络,成为服务器,让遥控掌控板当客户端接入进来。这样就无需依赖其他路由器wifi网络。所以速度快,无延迟。 哇,自带WIFI的掌控板,喜欢。  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









