|
8466| 2
|
[项目] Arduino 小制作:超声波数显标尺 |
本帖最后由 中二点 于 2019-11-1 12:51 编辑  MAKER:MissionCritical/译:趣无尽 Cherry(转载请注明出处) 本期为大家介绍一款外观酷似机器人的便携式超声波数显标尺。项目制作中,我们不会使用跳线或 PCB,电路和外观合二为一,直接由铜线焊接而成,复古又可爱。 材料清单
工作原理 工作的原理非常的简单  1、超声波传感器测量距离。 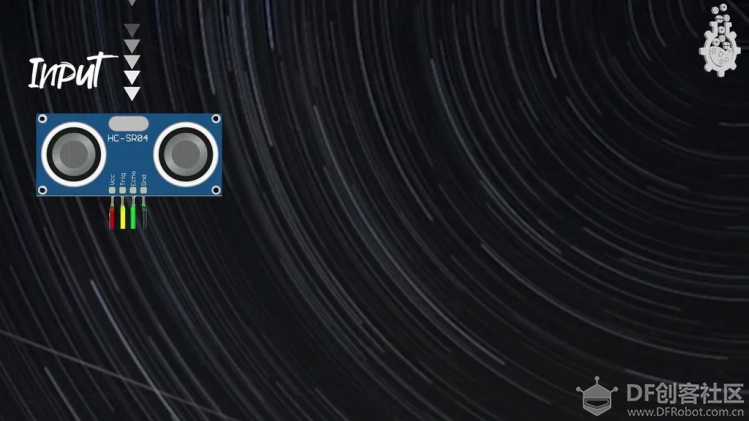 2、经 Arduino 计算后将结果显示在 I2C OLED 显示器上。 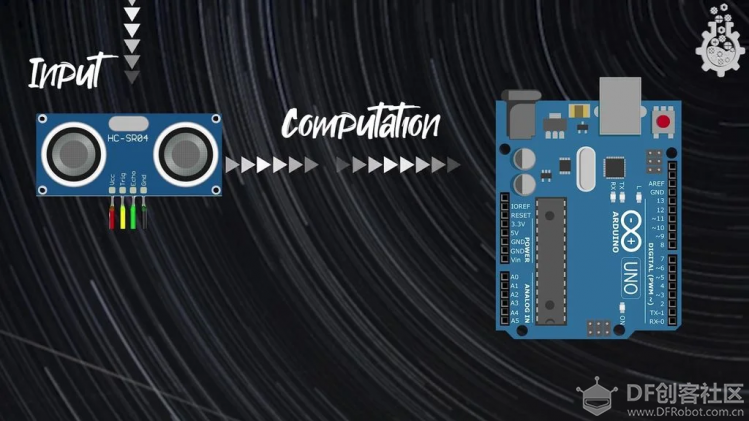 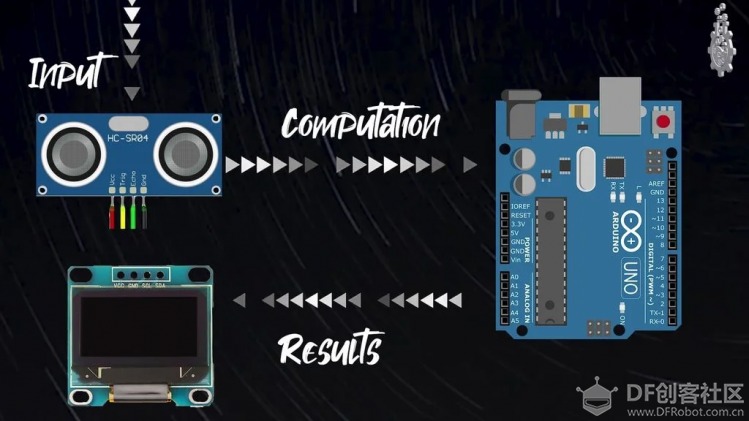 它介绍了如何使用超声波传感器制作一个雷达。  连线 在焊接前,需要用跳线连接起来进行代码测试。  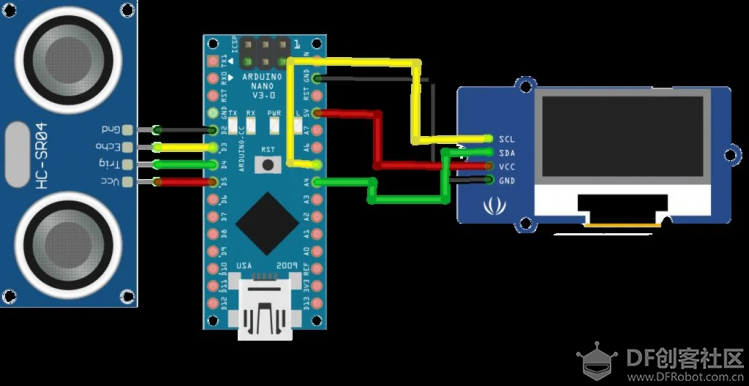 连接方式如下 超声波传感器部分: 地线 GND-D2 回声 ECHO-D3 触发 TRIG-D4 电源电压 VCC-D5 I2C OLED 显示器部分: 电源电压 Vcc-5v 地线 GND-GND 数据线 SDA-A4 控制线 SCL-A5 电路图和 Fritizing 文件请在项目文件库中下载。 https://make.quwj.com/project/155 上传代码 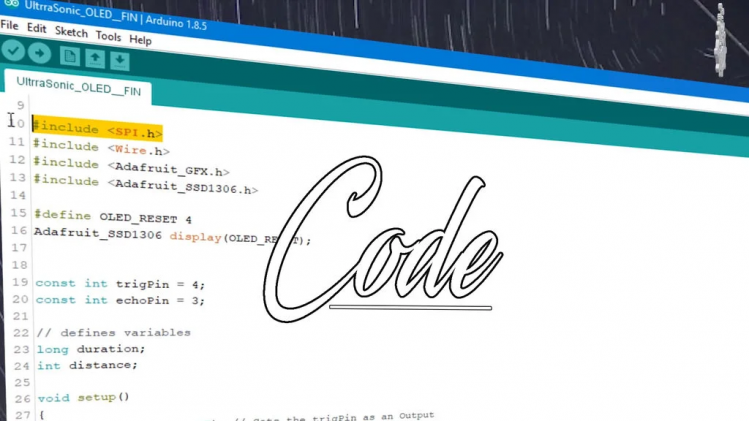 项目使用到的库有:SPI、Adafruit GFX 和 Adafruit ssd1306。 1、初始化 OLED,定义触发和回声引脚,定义变量。 2、在 PIN 模式下添加必要的定义,以及开机启动后屏幕显示的信息“Electronic scale by Mission Critical”。 3、在主循环部分中,设置以厘米为单位进行计算,音速为 340m/s,那么距离 = 0.034 * 时间 / 2。 4、在“distance”变量选项中保存距离数据并扩展到适当的光标位置。 5、上传代码至 Arduino nano。 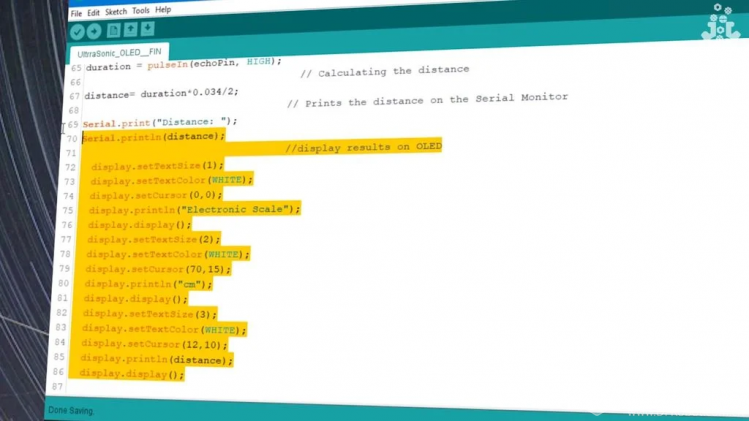 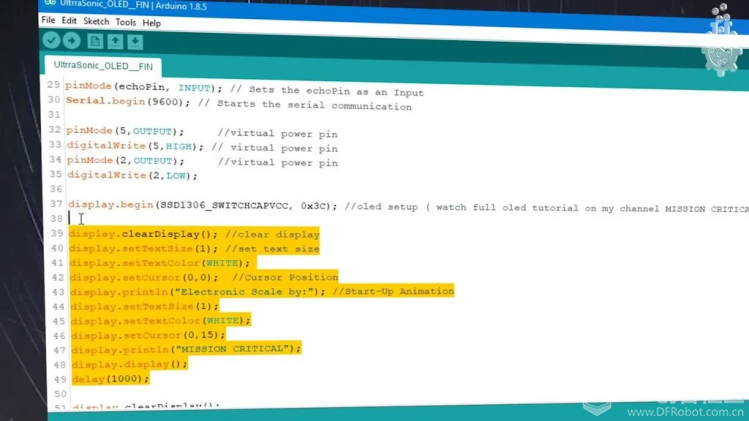 制作铜线外壳  1、使用 Autodesk 的 Fusion 360 制作了 CAD 设计图 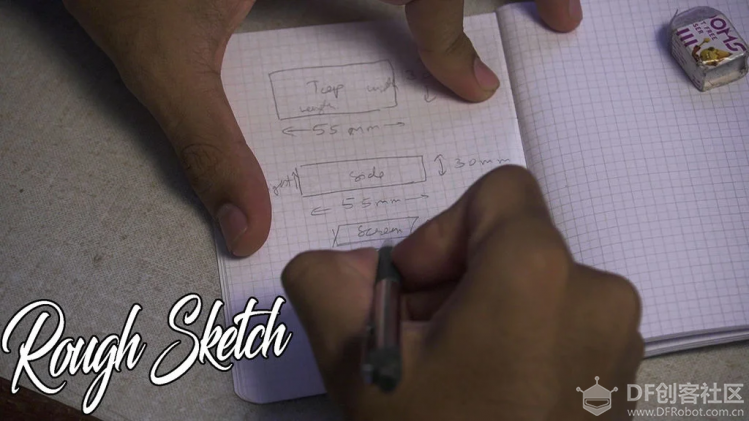  2、处理铜线 第一步:剪取数根 10cm 长的铜线以备用。  第二步:打开钻夹头,在铜丝的一端制作出一个弯曲的角。  第三步:拧紧钻夹头,用钳子稍微倾斜拉扯另一端,产生张力。 第四步:低转速打开钻头。 操作时请小心使用钻头。 3、焊接底座 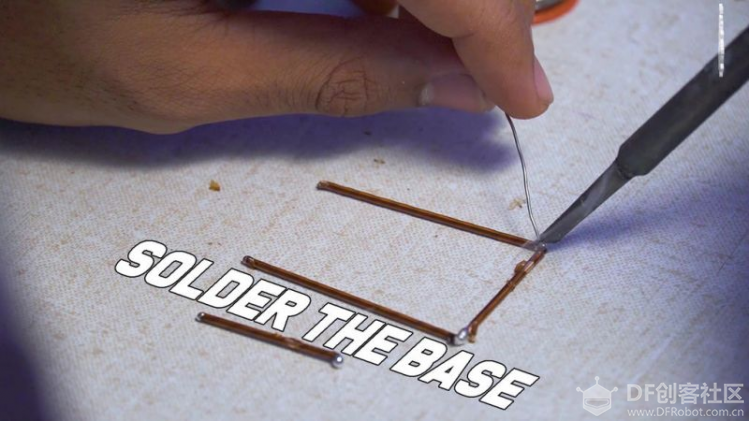 根据 CAD 图测量组件,从底座开始焊接,使用 18 号线进行焊接。 底座的尺寸:52mm X 34mm。  使用钳子分别切割两根个 52mm 和 34mm 的铜线,按图焊接。 焊接超声波传感器  将超声波传感器焊接到 Arduino 板上并形成一定的垂直高度,只需直接将超声波插入 Arduino 板中即可。 接线方式为: 地线 GND-D2 回声 ECHO-D3 触发 TRIG-D4 电源电压 VCC-D5 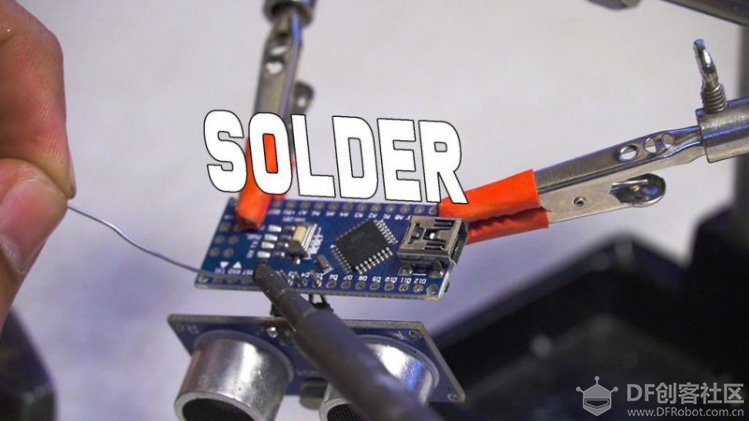 完成后即可焊接 Arduino 板,焊接时需要确保角度为直角。 安装 Arduino Nano 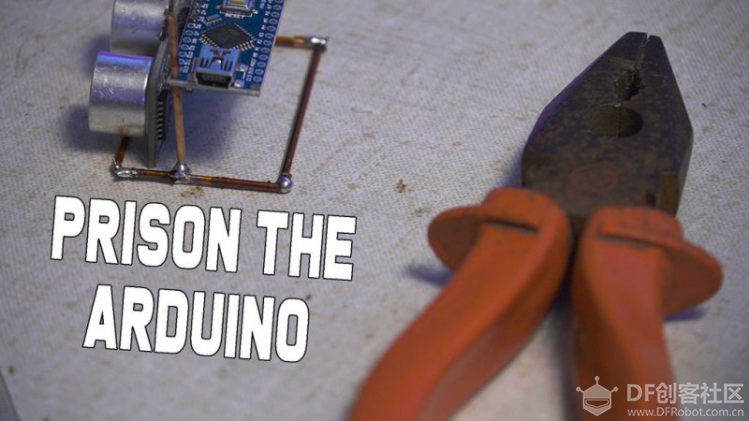 1、超声波传感器安装好后,需要使用铜丝与底座垂直焊接,传感器的高度约为 24mm,剪取四根24mm 的铜丝备用。  2、使用 Arduino nano 的板载的孔将其固定到位。使用 28mm 的线并将其弯曲至 24mm,焊接到底座。 安装显示器 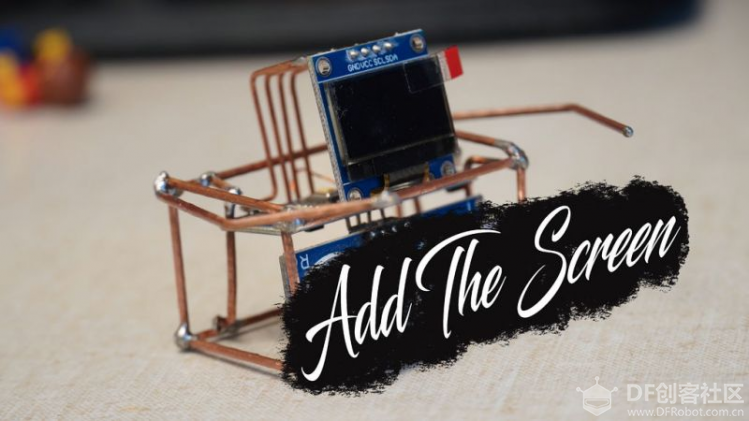 1、剪取四根 36mm 长的铜线,根据 Arduino 上的连接处的情况将其折叠成几个部分。 接线方式为: 电源电压 Vcc-5v 地线 Gnd-Gnd 数据线 SDA-A4 控制线 SCL-A5 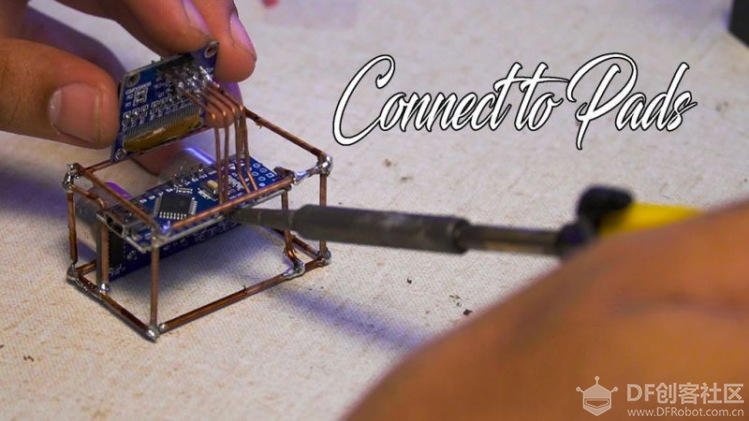 然后根据连接处的位置弯曲铜线即可。 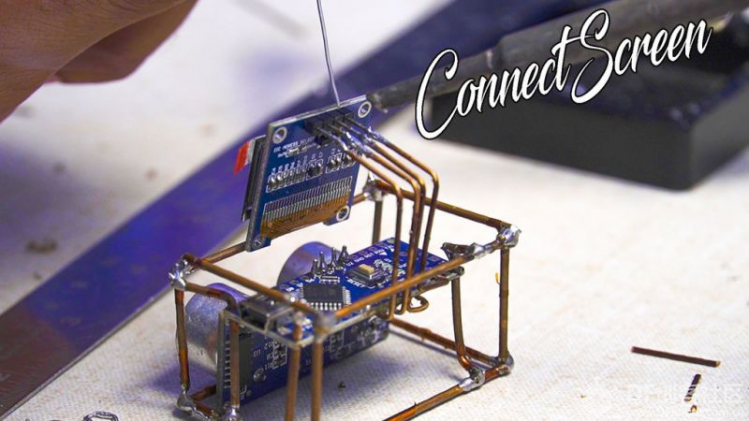 2、连接处焊接好后,如图所示焊接连接器的排针。 涂抹外壳保护层    项目完成后,在整个铜体结构上涂抹一层透明指甲油,可以防止铜与空气接触还可以增添光泽。 项目使用的是铜线,你可以用黄铜棒来代替它,这样更耐磨耐用。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







