|
19899| 2
|
[入门] 【自制风扇】基于Mind+ Ardunio入门教程13 |
|
这次,我们会做一个小风扇。同时会接触两件新元件——继电器、直流电机。继电器,我们可以理解为是用较小的电流去控制较大电流的一种“自动开关”。在这里,继电器是用来控制电机转动的。 所需元件 ■ 1× 5mm LED灯  ■ 2× 220欧电阻  ■ 1× 按钮  ■ 1× 继电器 HRS1H-S -DC5V  ■ 1× 小电机  ■ 1× 风扇叶片  硬件连接 按下图进行连线,按钮接线与项目三类似,连接到数字2。按钮一端连接5V,另一端连接GND,并用一个220Ω的电阻作为下拉电阻,以防引脚悬空干扰。继电器有6个引脚,分别标有序号。1、2引脚为继电器的输入信号,分别接Arduino的数字引脚和GND。3、4、5、6为继电器输出的控制引脚,这里只使用4、6两个引脚。我们把继电器想成一个开关,开关也只要用到两个引脚。 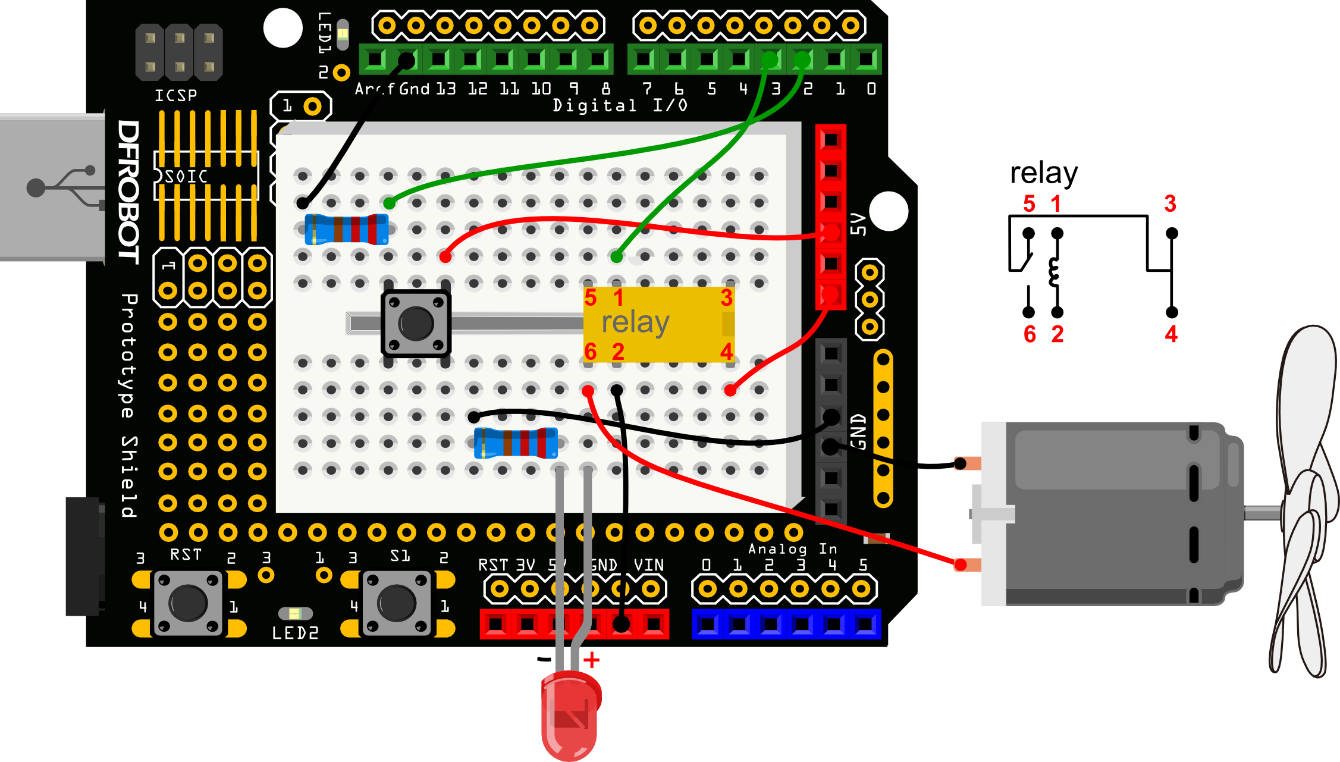 图 13-1自制风扇连线图 代码编程 样例程序13-1 [mw_shl_code=c,true]//项目十三 – Arduino控制风扇转动 int buttonPin = 2; // button连接到数字2 int relayPin = 3; // 继电器连接到数字3 int relayState = HIGH; // 继电器初始状态为HIGH int buttonState; // 记录button当前状态值 int lastButtonState = LOW; // 记录button前一个状态值 long lastDebounceTime = 0; long debounceDelay = 50; //去除抖动时间 void setup() { pinMode(buttonPin, INPUT); pinMode(relayPin, OUTPUT); digitalWrite(relayPin, relayState); // 设置继电器的初始状态 } void loop() { int reading = digitalRead(buttonPin); //reading用来存储buttonPin的数据 // 一旦检测到数据发生变化,记录当前时间 if (reading != lastButtonState) { lastDebounceTime = millis(); } // 等待50ms,再进行一次判断,是否和当前button状态相同 // 如果和当前状态不相同,改变button状态 // 同时,如果button状态为高(也就是被按下),那么就改变继电器的状态 if ((millis() - lastDebounceTime) > debounceDelay) { if (reading != buttonState) { buttonState = reading; if (buttonState == HIGH) { relayState = !relayState; } } } digitalWrite(relayPin, relayState); // 改变button前一个状态值 lastButtonState = reading; } [/mw_shl_code] 通过按键,可以控制电机和LED的开和关。 代码学习 代码的大部分内容,基本应该没有什么难度了,主要说下按键去抖问题。代码中: [mw_shl_code=c,true] if (reading != lastButtonState) { lastDebounceTime = millis(); } if ((millis() - lastDebounceTime) > debounceDelay) { if (reading != buttonState) { ... } } [/mw_shl_code] reading有变化之后,不是立马就采取相应的行动,而是先“按兵不动”,先看看这个信号是不是“错误信号”,所以再等待一阵,(也就是通过millis来实现这个等待过程的),发现确实是前方发过来的正确信号,然后执行相关动作。 之所以这么做的原因是,按键在被按下时,会有个抖动的过程,而不是立马由低变高,或者由高变低。所以这个过程中,可能会产生错误信号,我们通过程序中的这种方法,来解决硬件上的这个问题。 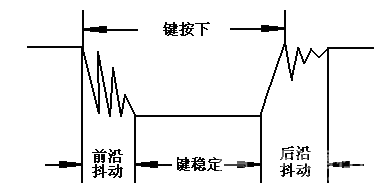 按键抖动 示意图 硬件回顾 继电器 我们可以把继电器理解为一个“开关”,实际上是用比较小的电流去控制较大电流的“开关”。这里只是为了让初学者了解继电器工作原理,所以没有使用较大的电源器件,还是选用是需要5V就能驱动的直流电机。 我们来看下继电器的内部构造: 这款继电器一共有6个引脚。1,2 引脚是用来接Arduino数字引脚和GND。通过数字引脚来驱动继电器。1,2两端为线圈两端。Arduino给HIGH后,线圈中就有电流,线圈就会产生磁性(就像磁铁一样),吸合中间的触片(能听到“哒”一声),常开端(NO)就与公共端导通。相反,如果Arduino给LOW,线圈中没有电流,常闭端(NC)就与公共端导通。 所以,电路中我们接了4,6引脚用于控制电机和LED的通断,(当然也可以用引脚3,6)。 直流电机、直流减速电机与舵机的区别 普通直流电机是我们接触比较多的电机。一般只有两个引脚,上电就能转,正负极反接则反向转动。如你所见,它做着周而复始的圆周运动,无法进行角度的控制,不过可以通过电机驱动板,可以对转速进行控制,不过由于普通电机转速过快,所以,一般不直接用在智能小车上。 直流减速电机是在普通电机加上了减速箱,这样便降低了转速,使得普通电机有的更广泛的使用空间,比如可以用于智能小车上。同样也可以通过PWM来进行调速。 舵机也是一种电机,它使用一个反馈系统来控制电机的位置,可以用来控制角度。所以,舵机经常用来控制一些机器人手臂关节的转动。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







