|
31020| 1
|
[入门] 【舵机初动】基于Mind+ Ardunio入门教程10 |
|
本帖最后由 DFEDU 于 2019-12-13 10:34 编辑 本项目要接触到舵机。舵机是一种电机,它使用一个反馈系统来控制电机的位置。可以很好掌握电机角度。大多数舵机是可以最大旋转180°的。也有一些能转更大角度,甚至360°。舵机比较多的用于对角度有要求的场合,比如摄像头,智能小车前置探测器,需要在某个范围内进行监测的移动平台。又或者把舵机放到玩具,让玩具动起来。还可以用多个舵机,做个小型机器人,舵机就可以作为机器人的关节部分。所以,舵机的用处很多。 Ardruino也提供了<Servo.h>库,让我们使用舵机变得更方便了。 先从简单入手,套件这个9G小舵机是180°的,我们就让它在0~180°之间来回转动。 所需元件 ■ 1× DFduino UNO R3(以及配套USB数据线)  ■ 1× Micro Servo 9g  硬件连接 这个项目的连线很简单,只需按图10-1所示连接舵机三根线就可以了,连的时候注意线序,舵机引出三根线。一根是红色,连到+5V上。一根棕色(有些是黑的),连到GND。还有一根是黄色或者橘色,连到数字引脚9。 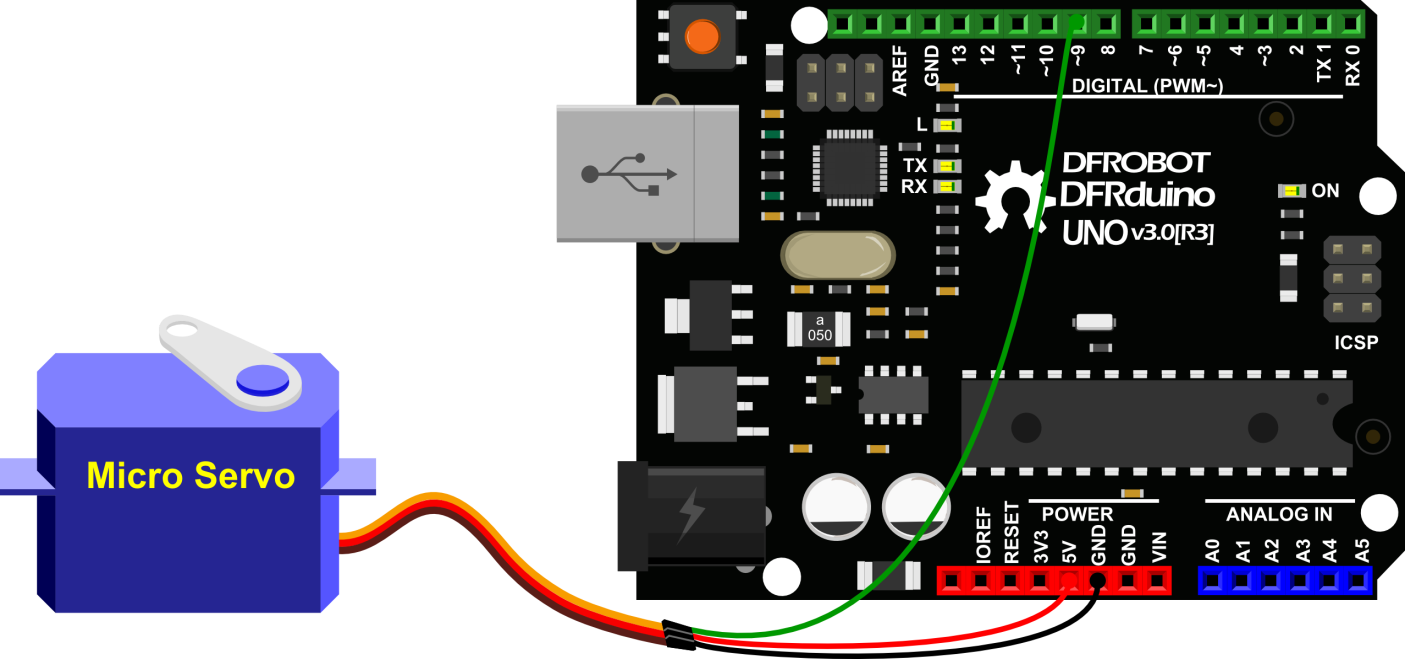 图 10-1 舵机连线图 代码编程 样例程序10-1 : [mw_shl_code=c,true]//项目十 - 舵机 #include <DFRobot_Servo.h> // 声明调用Servo.h库 Servo myservo; // 创建一个舵机对象 int pos = 0; // 变量pos用来存储舵机位置 void setup() { myservo.attach(9); // 将引脚9上的舵机与声明的舵机对象连接起来 } void loop() { for(pos = 0; pos < 180; pos += 1){ // 舵机从0°转到180°,每次增加1° myservo.angle(pos); // 给舵机写入角度 delay(15); // 延时15ms让舵机转到指定位置 } for(pos = 180; pos>=1; pos-=1) { //舵机从180°转回0°,每次减小1° myservo.angle(pos); // 写角度到舵机 delay(15); // 延时15ms让舵机转到指定位置 } } [/mw_shl_code] 代码的第一行是我们在本项目中需要学习关于库的知识。这行指令我们未曾接触过,但是在Mind+中我们能够通过以下步骤来熟悉和舵机有关的代码。 STEP1:进入扩展,点击执行器  STEP2:在界面右上角的搜索中输入“舵机”  STEP3:选择项目中所要求的0-180°舵机  STEP4:回到主界面,将新加载舵机的指令拖入“手动编辑”的输入框中,即可看见它对应的代码  所有的指令都可以通过拖进手动编辑区,对应的c代码会出现。在之后遇到新指令的代码学习,或是一时忘记指令对应的指令,都可以通过这一方式来查看和温故代码。并且这些代码都可以直接复制到手动编辑区中,但别忘记根据连接图来修改相关参数! 下载代码,下载成功后我们可以看到舵机0~180°来回转动。  代码学习 代码的开始先调用<DFRobot_Servo.h>库 [mw_shl_code=c,true]1. #include <DFRobot_Servo.h> // 声明调用Servo.h库 [/mw_shl_code] 这库已经在Mind+中,打开Mind+1.6.1\Arduino\libraries\DFRobot_Servo\DFRobot_Servo.h,这就是Servo库所在位置。 库是什么? 我们怎么理解库呢?和我们前面讲到的函数意义是差不多的。函数通常按一个个功能来划分的,就像一个个小的储物柜,函数名好比储物柜标签名。我们使用的时候,直接看标签就好了,方便我们使用。那库是什么呢?库则是把多个函数封装打包起来,好比大的储物柜,里面含有一个个小的储物柜。不知道这样说,你是不是能理解库和函数的关系? 对象 同样,大储物柜也需要一个标签,这标签的学术名叫做“对象”。所以这里叫创建一个对象。就是我们接下来的这句语句: Servo myservo; // 创建一个舵机对象 setup()函数中有一条语句: myservo.attach(9); 这里就开始调用Servo库中的函数了,和我们以前函数调用有点区别。这里,我们需要先指明这是哪个库中的函数。所以,先指出对象名,再指出函数名。每次要用到储物柜的东西就要先指明这个标签。这样程序才知道要去哪里找东西。 库函数调用格式如下: 对象名.函数名(); 不要忘了中间的“.”!myservo是我们前面设的标签(对象),然后调用的函数是:  attach(pin)函数有一个传递参数——pin, 任意一个数字引脚(不建议使用数字0,1)。我们这里选择数字引脚9。 进入主函数,有两个for循环,第一段是从0开始,循环到180,每次增加1度。第二个for循环则是从180开始,每次减小1度,一直减到0。在回到上面那个循环中…… for循环中又调用了一个Servo库中的函数myservo.angle(pos),我们可以不用管函数内部复杂的程序,只要先会使用就可以了。 myservo.angle(pos); 和上面那个函数调用一样,先要指明是哪个库。该函数的传递参数就是角度,单位为“°”。 如果还想了解DFRobot_Servo库中还有哪些好用的函数的话,可以到Mind+官网中的教程和论坛查看,里面会有相关介绍的。 我们这里对舵机的硬件部分就不做详细说明了,先学会简单的使用即可。如果还想了解更多的话,可以借助我们丰富的社区资源。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







