|
6172| 2
|
[入门教程] 【2020】mPythonX|我的“小马”真听话 |
掌控|我的“小马”真听话-1 【开篇FEIHUA】 玩过不少机器人小车,N+千里马是最小的一个。  超声波传感器也小巧,专门设计装上正好。 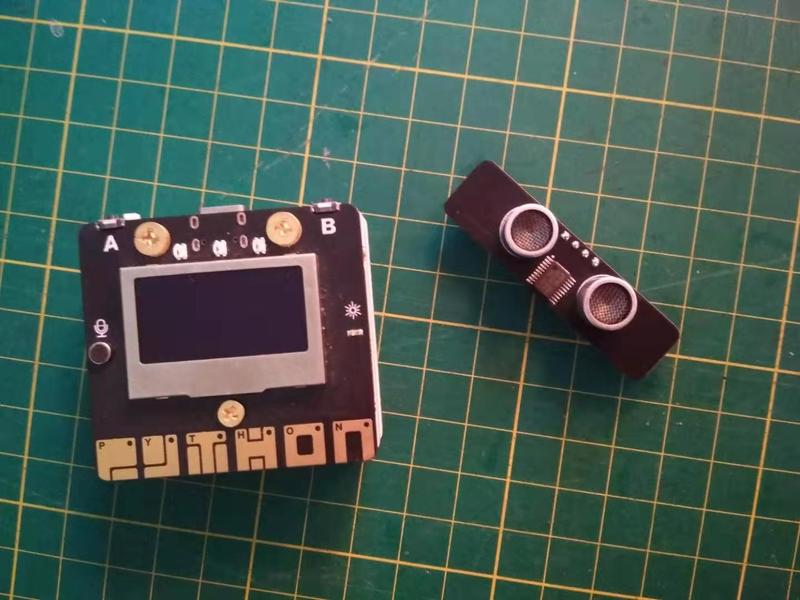 我手上这匹,也兽经在这里列队,长得一模一样也看不出是哪一个。  小马提醒我说有作业要完成,春节宅家,就写起来吧。  我的作业总是很水,好在数量多,也希望勉强能够过关。 掌控的语音识别能有已经不错,99的它已经超值很多很多。 【项目展示】 【器材准备】 掌控板2.0 1 掌控板1.0 1 鸽子扩展板 2 千里马 1 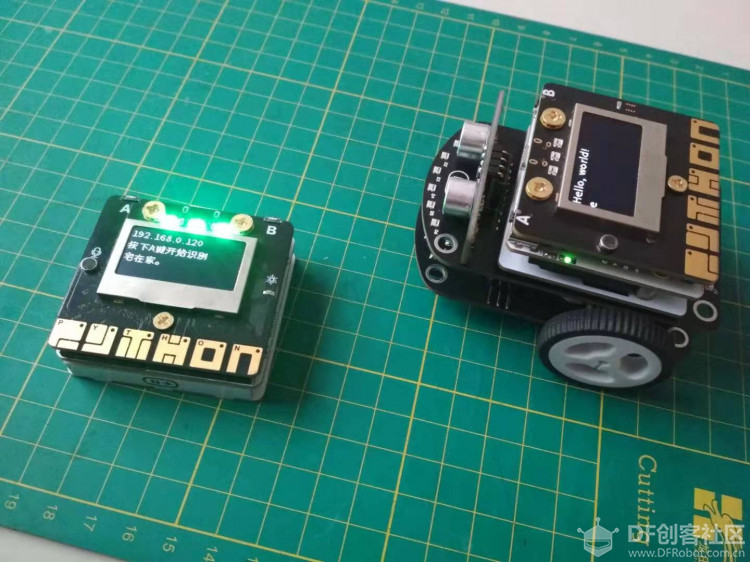 【项目计划】 掌控板A语音识别 无线发送消息 掌控板B无线接收 执行动作灯效 关键词 千里马 彩虹灯效 前进2秒 勤洗手 灯效改变 后退2秒 戴口罩 灯效改变 左转2秒 少出门 灯效改变 右转2秒 宅在家 灯效改变 停车 【项目实现】 1、语音识别遥控端 mPythonX0.5.1 这个版本,改进了语音识别,用了labplus自己的中转服务器,可以很快识别语音,识别速度2秒以内。 刷固件(2020-1-16) 用到的主要积木  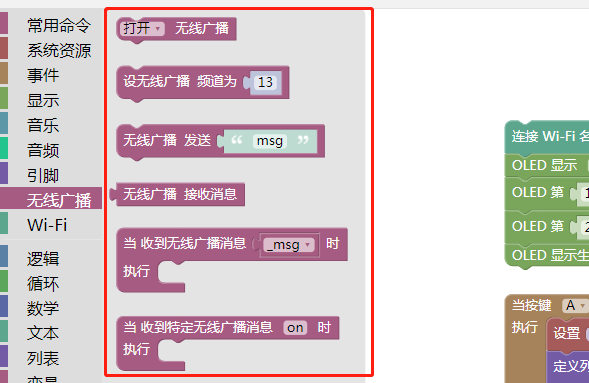 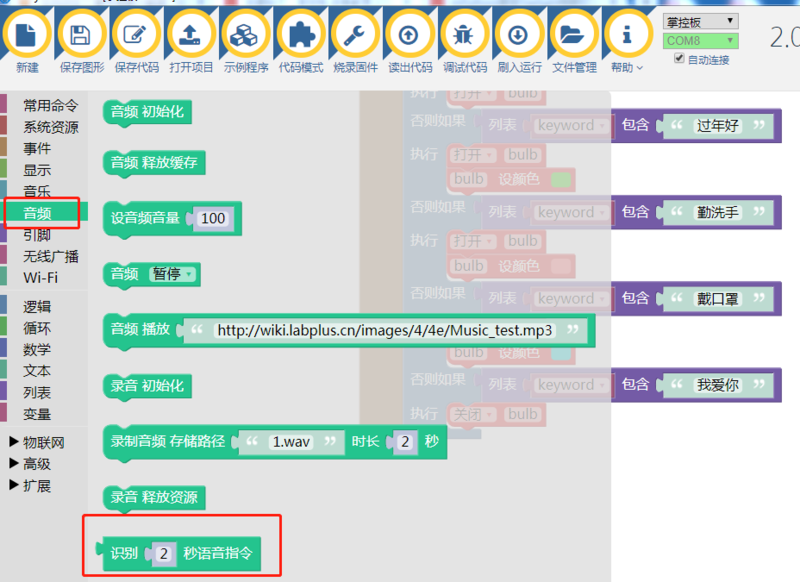 写发送板程序 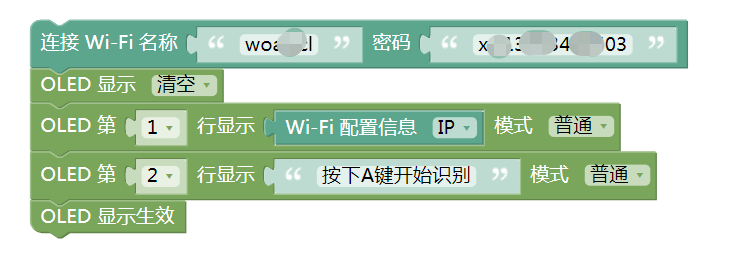 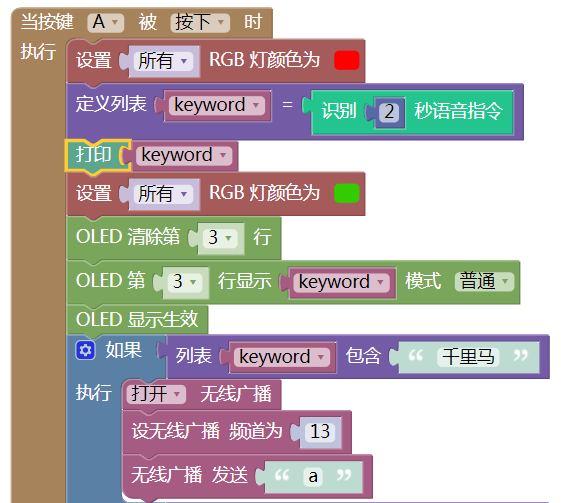 接下来  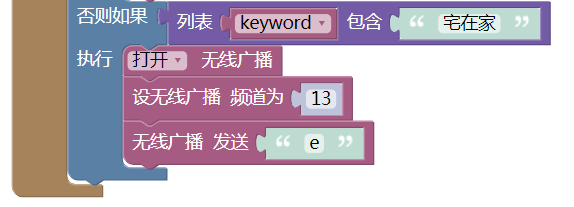 2、接收掌控 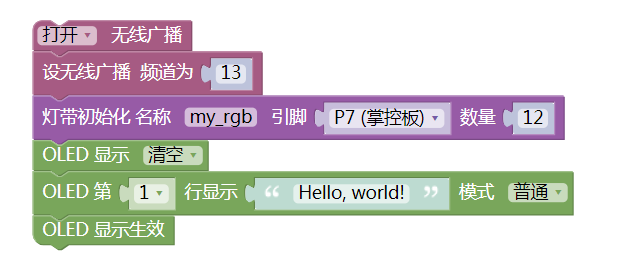 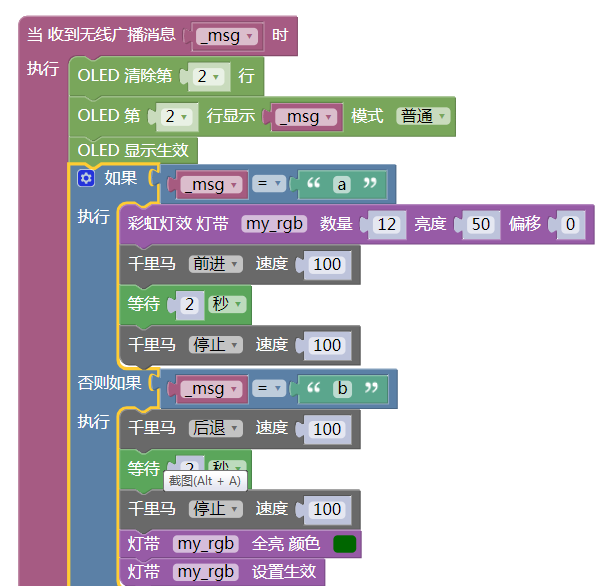 上面a中少了一句灯带生效,接下来 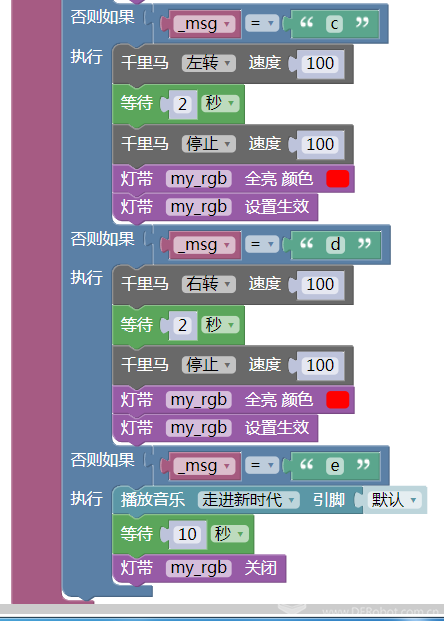 哈哈,第一个测试是蛮简单的,测试么,就从简单的来吧。 【小结几句】掌控板的语音识别只是有,识别的准确度与网络、环境、个人普通话水平、音质音量有关系,加上识别的延迟等因,测试玩下可以,操控对时效要求高的项目,还是不要用了。小马用起来感觉还是很棒,这个只是测试版,正式板据说加上了新的功能,而且,N+的视觉识别传感器据说也在研发中了,这个世界,越来越美丽了哈。  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









